4i)
СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации движений глаз оператора | 1980 |
|
SU935072A1 |
| Устройство измерения углов поворота глаза | 1985 |
|
SU1438691A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ИНСАЙТНЫХ СПОСОБНОСТЕЙ МЫШЛЕНИЯ | 2015 |
|
RU2624672C2 |
| Устройство для измерения координат точек фиксации взгляда оператора | 1982 |
|
SU1090333A1 |
| Способ определения направления взгляда | 2019 |
|
RU2815470C1 |
| Способ определения ориентации головы оператора относительно объекта наблюдения и устройство для его осуществления | 1988 |
|
SU1805915A3 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ТОЧКИ ВЗГЛЯДА НАБЛЮДАТЕЛЯ | 2011 |
|
RU2565482C2 |
| Устройство для регистрации движения глаз | 1981 |
|
SU1009418A1 |
| Устройство для количественного и качественного анализа вестибулярной дисфункции методом видеонистагмографии | 2024 |
|
RU2839509C1 |
| ИНДИВИДУАЛЬНЫЕ КОНТАКТНЫЕ ЛИНЗЫ С РЕПЕРНЫМИ ЗНАКАМИ | 2010 |
|
RU2562690C2 |
Изобретение относится к эргоно-.: мике и инженерной психологии и может использоваться при проектировании информационных панелей пультов. Цель изобретения - расширение уголового ,,. диапазона определения направления взгляда оператора. Способ включает облучение глаза потоком ИК-излучения от п квазиточечных источников (КИ), КИ размещаются в плоскости наблюдения и кодируются. Плоскость локализа-- ции изображений КИ, построенных пе-. редней областью глаза, фиксируют относительно головы наблюдателя, а координаты точек фиксации взгляда рас-; читьшают. 3 ил. (Л
to ч
Изобретение относится к эргономике и инженерной психологии, касается вопросов регистрации и анализа зри- т;ельной деятельности оператора, н может использоваться при эргономи- ч:еском проектировании информационных п анелей пультов.
Цель изобретения - расширение углового диапазона определения направ- Яения взгляда оператора.
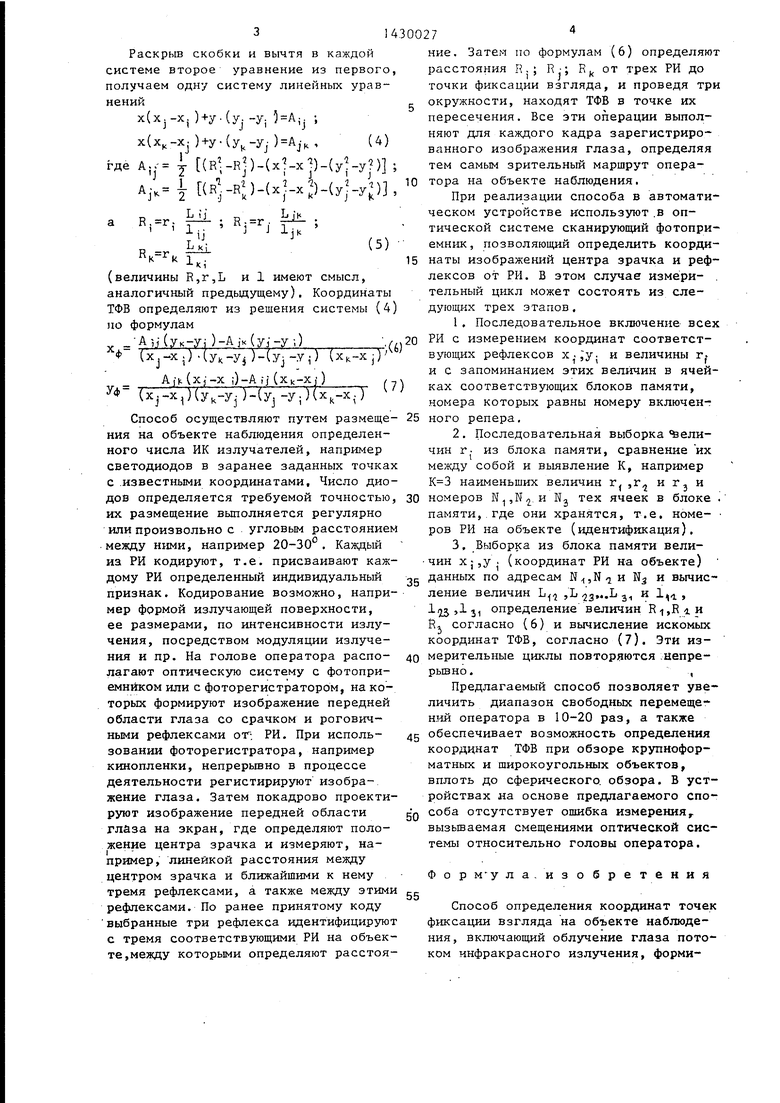
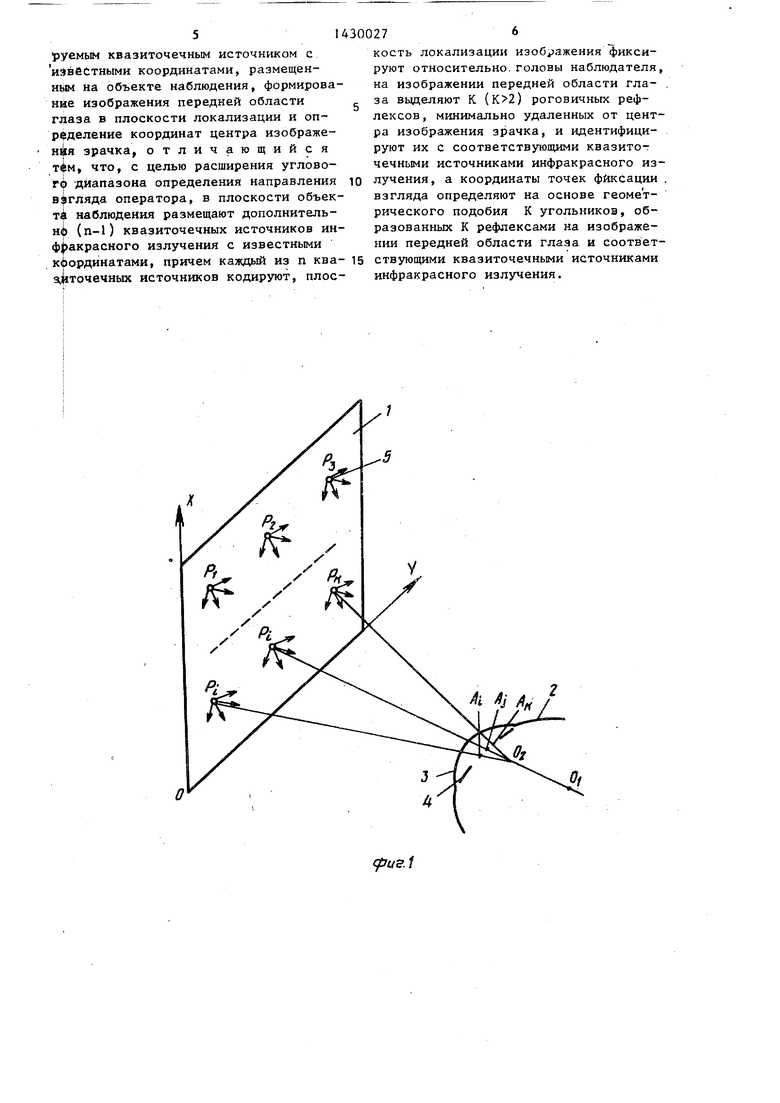
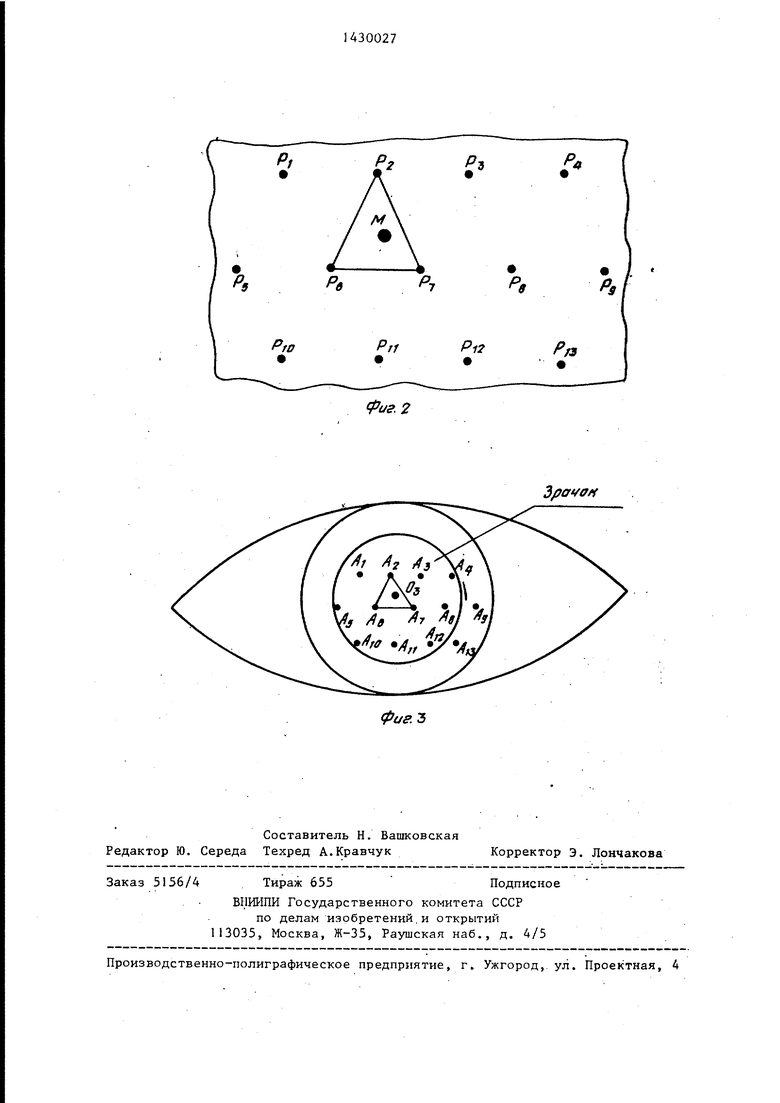
I На фиг, 1 показан принцип геомет- р ического подобия множества рогович- 1ф)1х рефлексов множеству соответствую Цих реперных источников (РИ) инфра- KjpacHoro излучения на объекте наблюдения; на фиг. 2 и 3 - варианты ис- цользования геометрического подобия iля определения координат точек фик- цации взгляда (ТФВ) на объекте.
i Для осуществления способа на.объ- фте 1 наблюдения (фиг, 1), на ко- liopoM в системе координат XOY необхо ;(имо определять координаты ТФВ глаза 2 (центр вращения .глаза 0) с ро г овицей 3 (центр кривизны роговицы Oj) и с зрачком 4, фиксируют квазиточечные РИ 5 раходящегося инфракрасного (ИК) излучения. Рефлексы А:,А-, АК (фиг. I) соответствуют РИ Р ,Р., р| на объекте, причем соотношение расстояний между рефлексами на рогови ,це равно соотношению расстояний между соответствующими РИ на объекте (:С точностью до методической ошибки, э ависящей от величины угла наклона септической оси глаза к плоскости о|бъекта). Поэтому для фиг,1 координа 1|а ТФВ определяется как
Lil .
(1)
: .+Е.Х +
Ч
где X. - координата источника Р ;
R. - расстояние от точки фиксации
взгляда до Р;; L ,. - расстояние между РИ Р ; и Р.
на объекте;
Ij, - расстояние между соответствующими рефлексами А j и А. на роговице; г. - расстояние от центра зрачка
до рефлекса А,- .
Реально в роговице глаза изобра-.: кается множество РИ, причем рефлексы не лежат на одной прямой вместе с центром зрачка, а группируются вокруг него в некоторой окрестности. Напри мер, РИ FT-P,J на фрагменте объекта наблюдения (фиг.2) изображаются в виде рефлексов А,-А, на роговице глаза
5 0
5 о
5
0
с
5
с центром зрачка 0 (фиг.З). При этом на роговице можно выделить К рефлек- сов, образующих К-угольник, внутри i которого расположен центр 0 зрачка и вершины которого наименее удалены от центра зрачка. Например, при этим требованиям удовлетворяет тре- . угольник рефлексов А,, А (фИг.З) соответствующий реперному треуголь«и- ку P,j ,Р и Р (фиг, 2), Если построить пирамиду с вершиной в центре кривизны роговицы и с основанием в виде треугольника и Р , то треугольники А,,А и Ау и PJ ,P и Р, геометрически подобны, причем положение точки Оэ в первом треугольнике подобно положению точки М во втором треугольнике, G учетом указанного подобия, рассматриваемого с точностью до методической ошибки, расстояния от вершин реперного треугольника Р, Р и Р-, до точки фиксации взгляда М (фиг,2) определяют из соотношений: Ь.й „ Lt7
R г - 1 i 2
ч.
б I
R,r,i
(,1
7- 71,, (2)
где величины в (2) являются следующими отрезками на фиг, 2а и 26:
,R R , , .
72
(Л(. 7
R И R
0
L , PI ,
После того как найдены радиусы К, положение точки М уже определено, так как проведя три окружности радиусов R,R и R7 с центрами в точках Р jP и Р определяют точку М на пересечении этих окружностей.
Для автоматического осуществления .способа положение ТФВ на объекте определяют через ее координаты, например, по формулам, вывод которых приведен для , В этом случае треугольнику рефлексов А;,А и А соответствует реперный треугольник Р., Р- и Р , Составляются две системы квадратных уравнений: двух окружностей,.с центрами Р- . и Р и радиусами
и R , и двух окружностей с центраR
ми
Р: И Р И радиусами R ; и R
(Х-Х;)+(У-У)Н.; (Х-Х.)+(У-У, )RV J
; - -; J (x-xj)4(y-y.) (x-xjn(y-y,)VR.
(3)
Раскрьш скобки и вычтя в каждой системе второе уравнение из первого, получаем одну систему линейных уравнений
х(х.-х, +у-(у. -у. (. ;
x( )+у-( )Aj , (4) где А,.- (R .RJ)());
.;. -I r(R .-RM-()-(v -vni. )
L jK
),
.i 1 . J J -LjK
ние. Затеи по формулам (6) определяют расстояния R.; R-; R | от трех РИ до точки фиксации взгляда, и проведя три g окружности, находят ТФВ в точке их пересечения. Все эти операции выполняют для каждого кадра зарегистрированного изображения глаза, определяя тем самым зрительный маршрут опера- 10 тора на объекте наблюдения.
При реализации способа в автоматическом устройстве используют .в оптической системе сканирующий фотопри- (5) емник, позволяющий определить коордиKj15 наты изображений центра зрачка и рефлексов от РИ. В этом случае измерительный цикл может состоять из следующих трех этапов,
I, Последовательное включение всех 20 РИ с измерением координат соответст- Сх,-х.1 Туц-у Т-Ту -У() (XK-XJ) вующих рефлексов x.;yj и величины г.
. / д / и с запоминанием этих величин в ячей- AjK Х)-X ij-A fi XK-XJ j /-.V
У4, (x.-x )(v -у. )-(v -v.)(x -X.) соответствующих блоков памяти,
j j k 1номера которых равны номеру включенСпособ осуществляют путем размеще- 25ного репера.
кия на объекте наблюдения определен- 2. Последовательная выборка величин г. из блока памяти, сравнение их
v,-
L«; (величины R,r,L и 1 имеют смысл, аналогичный предыдущему). Координаты ТФВ определяют из решения системы (4) по формулам
V - Аъ (Ук-У )( ;)
л-ж -
г;(б)
ного числа ИК излучателей, например светодиодов в заранее заданных точках с .известными координатами. Число диодов определяется требуемой точностью, ЗО номеров N,,N и Nj тех ячеек в блоке .
между собой и вьшвление К, например наименьших величин г.,Ги Tj и
их размещение вьшолияется регулярно или произвольно с угловым расстоянием между ними, например 20-30°. Каждый из РИ кодируют, т.е. присваивают каждому РИ определенный индивидуальный признак. Кодирование возможно, например формой излучающей поверхности, ее размерами, по интенсивности излучения, посредством модуляции излучения и пр. На голове оператора располагают оптическую систему с фотопри- емнйком или с фоторегистратором, на которых формируют изображение передней области глаза со срачком и рогович- ными рефлексами РИ. При использовании фоторегистратора, например кинопленки, непрерьшно в процессе деятельности регистирируют изображение глаза. Затем покадрово проектируют изображение передней области глаза на экран, где определяют положение центра зрачка и измеряют, напамяти, где они хранятся, т.е. номе- ров РИ на объекте (идентификация),
3, Выборка из блока памяти вели- чин х;,у . (координат РИ на объекте)
25 данных по адресам N,N-i и Nj и вычисление величин L ,.31 li Д 31 определение величин RI,R а и ftj согласно (6) и вычисление искомых координат ТФВ, согласно (7). Эти из40 мерительные циклы повторяются :аепре- рьшно.,
Предлагаемый способ позволяет увеличить диапазон свободных перемеще- Н.ИЙ оператора в 10-20 раз, а также
45 обеспечивает возможность определения координат ТФВ при обзоре крупноформатных и широкоугольных объектов, вплоть до сферического, обзора. В устройствах на основе предлагаемого споg Q соба отсутствует ошибка измерения,. вызьшаемая смещениями оптической системы относительно головы оператора.
пример, линейкой расстояния между центром зрачка и ближайшими к нему тремя рефлексами, а также между этими рефлексами. По ранее принятому коду выбранные три рефлекса идентифицируют с тремя соответствующими РИ на объекте,между которыми определяют расстояvni.
y),
(5)
номеров N,,N и Nj тех ячеек в блоке
между собой и вьшвление К, например наименьших величин г.,Ги Tj и
памяти, где они хранятся, т.е. номе- ров РИ на объекте (идентификация),
3, Выборка из блока памяти вели- чин х;,у . (координат РИ на объекте)
данных по адресам N,N-i и Nj и вычисление величин L ,.31 li Д 31 определение величин RI,R а и ftj согласно (6) и вычисление искомых координат ТФВ, согласно (7). Эти измерительные циклы повторяются :аепре- рьшно.,
Предлагаемый способ позволяет увеличить диапазон свободных перемеще- Н.ИЙ оператора в 10-20 раз, а также
обеспечивает возможность определения координат ТФВ при обзоре крупноформатных и широкоугольных объектов, вплоть до сферического, обзора. В устройствах на основе предлагаемого способа отсутствует ошибка измерения,. вызьшаемая смещениями оптической системы относительно головы оператора.
Форм ула. изобретения
Способ определения координат точек фиксации взгляда на объекте наблюдения, включающий облучение глаза потоком инфракрасного излучения, формируемым квазиточечным источником с известными координатами, размещенным на объекте наблюдения, формирование изображения передней области глаза в плоскости локализации и определение координат центра изображе- нфя зрачка, отличающийся тфм, что, с целью расширения углово- гф диапазона определения направления взгляда оператора, в плоскости объекту наблюдения размещают дополнитель- н (п-) квазиточечных источников ин- ф | акрасного излучения с известными кдординатами, причем каждый из п ква з йточечных источников кодируют, плос
14300276
кость локализации изображения фиксируют относительно.головы наблюдателя, на изображении передней области гла- . с за выделяют К () роговичных рефлексов, минимально удаленных от центра изображения зрачка, и идентифицируют их с соответствующими квазиточечными источниками инфракрасного из- 10 лучения, а координаты точек фиксации . взгляда определяют на основе геометрического подобия К угольников, образованных К рефлексами на изображении передней области глаза и соответ- 15 ствующими квазиточечными источниками
инфракрасного излучения.
/ Щ
/
/
/PL
Pi
инфракрасного излучения.
сригЛ
(иг.2
3flcf40ff
фие. З
