со о со
Изобретение относится к измерительной технике и может быть использовано для измерения пространственно-временной изменчивости параметров водной среды.
Целью изобретения является расширение области применения, повышение достоверности информации и надежности устройства.
На фиг. 1 приведена структурная схема устройства для измерения параметров водной среды; на фиг. 2 - схема блока согласования.
В состав устройства входят погружаемый контейнер 1, содержащий блок управления 2, блок памяти 3, источник питания 4, управляемый переключатель 5, аналого-цифровой преобразователь б, датчик гидрофизических параметров 7, таймер 8, приемник 9, передатчик 10, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 11, триггер 12, блок согласования 13 и блок подключения, выполненный в виде одноконтактного герметизированного разъема 14, одножильный кабель-трос 15 и 16.
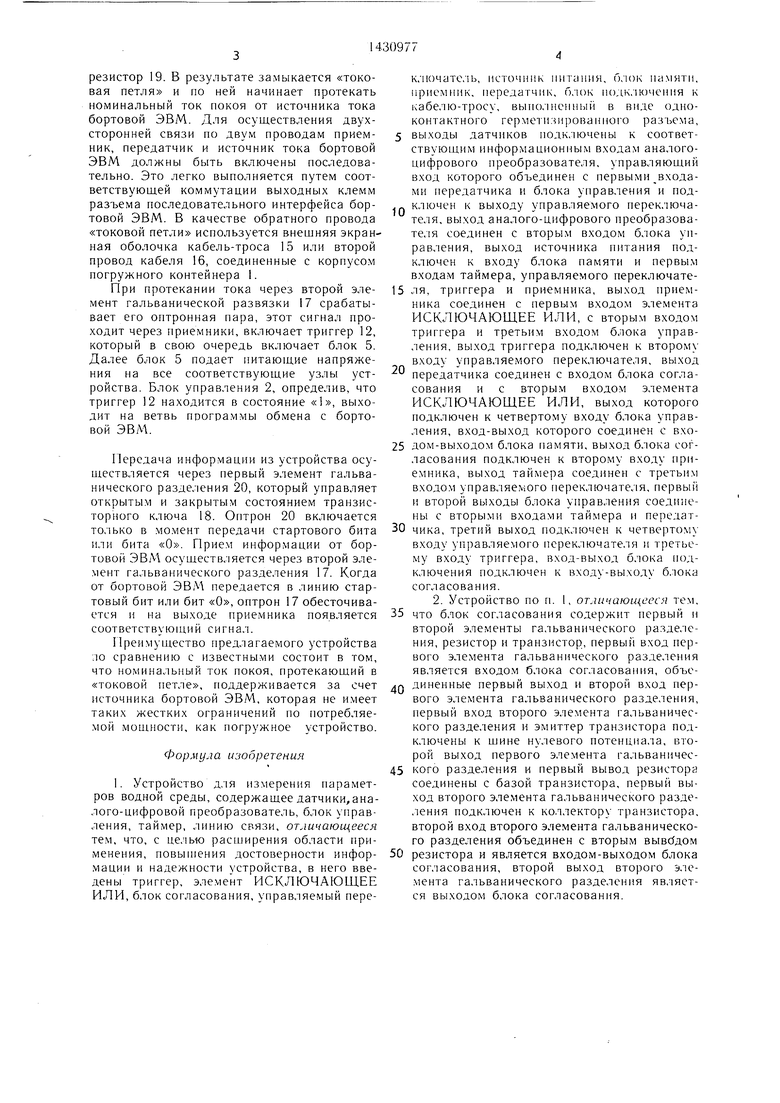
Блок согласования 13 содержит последовательно соединенные второй элемент гальванического разделения олтронного типа 17 и транзисторный ключ 18, резистор 19, и первый элемент гальванического разделения оптронного типа 20.
Устройство работает следующим образом.
В режиме автономной работы по сигналу от таймера 8 происходит включение управляемого переключателя, который подает необходимые питающие напряжения на блок управления 2, аналого-цифровой преобразователь 6 и передатчик 10. Одновременно с включением блока 5 вырабатывается сигнал начального сброса блока управления 2, который удерживает его в состоянии сброса до завершения переходных процессов в блоке 5. После прекращения сигнала начального сброса, блок 2 начинает работать по программе, начинающейся с нулевого адреса блока памяти 3, опращивает триггер 12 и, установив, что он находится в состоянии «О, переходит на соответствующую ветвь программы, обеспечивающую преобразование сигналов датчиков 7 в код многоканальным аналого-цифровым преобразователем 6 и запись полученных кодов в свободную область памяти блока 3. После этого блок управления 2 программирует таймер 8 на интервал времени до следующего измерения и подает сигнал выключения в блок 5 и триггер 12. При этом состоянии «О триггера 12 подтверждается. В автономном режиме, когда к блоку подключения 14 не подключены внещние устройства, оптроны 17 и 20 блока согласования обесточены.
В режиме зондирования или телеизмерения погружаемый контейнер 1 соединяется через блок подключения 14 с клеммами последовательного интерфейса бортовой ЭВМ. В режимах настройки, котроля или
считывания данных кабель-трос 15 заменяется кабелем 16. При подаче сигнала от бортовой ЭВМ через кабель-трос 15 или кабель 16 на блок 14 погружаемого контейне- ра 1 этот сигнал проходит через блок согласования 13, приемник 9 и переводит триггер 12 в состояние «1, который сигналом со своего выхода включает управляемый переключатель 5, который подает напряжения питания на блок 2, элемент ИСКЛЮЧАЮO ЩЕЕ ИЛИ 11, передатчик 10 и многоканальный аналого-цифровой преобразователь 6. Одновременно с включением блока 5 вырабатывается сигнал начального сброса. Блок управления 2, начиная работать по
5 программе, хранящейся в блоке памяти 3 с нулевого адреса, опращивает триггер 12 и, установив, что он находится в состоянии «1, переходит на ветвь программы, в соответствии с которой ожидает директив от бортовой ЭВМ, передаваемых по кабелю 16 или
0 кабель-тросу 15, которые подключаются к погружному устройству 1 через герметизированный одноконтактный разъем блока подключения 14.
В соответствии с директивами, передаг ваемыми от бортовой ЭВМ, блок управления 2 переходит на программные ветви зондирования, телеизмерения, настройки, контроля или вывода информации собственного блока памяти 3. При этом по соответствующей ветви программы блок 2 передает
Q требуемую информацию через передатчик 10, блок согласования 13, разъем 14 блока подключения и кабель-трос 15 или кабель 16 в бортовую ЭВМ. Для того, чтобы оперативно передать команду в погружное устройство 1 бортовая ЭВМ должна передать в
5 линию любую информацию в момент передачи информации из погружного устройства 1..
При несовпадении любого передаваемого бита с принимаемым на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 11 появляется сиг нал, который подается на вход «Прерыва- н ие блока управления 2. По прерыванию блок 2 переходит на режим ожидания управляющей команды от бортовой ЭВМ. В качестве бортовой ЭВМ может использоваться
5
любая ЭВМ.
Блок согласования 13 (фиг. 2) работает следующим образом.
В исходном состоянии, когда к разъему 14 блока подключения не подключены внещ- ни.е устройства, транзисторный ключ 18
0 закрыт, оптроны 17 и 20 обесточены и внутренняя элктронная схема гальванически отвязана от контакта герметизированного разъема блока, подключения 14. При подключении выходных клемм последовательного интерфейса бортовой ЭВМ к блоку 14
5 с помощью кабель-троса или кабеля 16 транзисторный ключ 18 открывается положительным смещением, подаваемым на базу через
резистор 19. В результате замыкается «токовая петля и по ней начинает протекать номинальный ток покоя от источника тока бортовой ЭВМ. Для осуществления двухсторонней связи по двум проводам приемник, передатчик и источник тока бортовой ЭВМ должны быть включены последовательно. Это легко выполняется путем соответствующей коммутации выходных клемм разъема последовательного интерфейса бортовой ЭВМ. В качестве обратного провода «токовой петли используется внещняя экранная оболочка кабель-троса 15 или второй провод кабеля 16, соединенные с корпусо.м погружного контейнера 1.
При протекании тока через второй элемент гальванической развязки 17 срабатывает его оптронная пара, этот сигнал проходит через приемники, включает триггер 12, который в свою очередь включает блок 5. Далее блок 5 подает питающие напряжения на все соответствующие узлы устройства. Блок управления 2, определив, что триггер 12 находится в состояние «1, выходит на ветвь программы обмена с бортовой ЭВМ.
Передача информации из устройства осуществляется через первый элемент гальванического разделения 20, который управляет открытым и закрытым состоянием транзисторного ключа 18. Оптрон 20 включается TO. ibKO в .мо.мент передачи стартового бита или бита «О. Прием информации от бортовой ЭВМ осуществляется через второй элемент гальванического разделения 17. Когда от бортовой ЭВМ передается в линию стартовый бит или бит «О, оптрон 17 обесточивается и на выходе приемника появляется соответствующий сигнал.
Преимущество предлагаемого устройства V10 сравнению с известными состоит в том, что номинальный ток покоя, протекающий в «токовой петле, поддерживается за счет источника бортовой ЭВМ, которая не имеет таких жестких ограничений по потребляемой мощности, как погружное устройство.
Формула изобретения
I. Устройство д. 1Я измерения параметров водной среды, содержащее датчики,ана- лого-цифровой преобразователь, блок управления, таймер, линию связи, отличающееся тем, что, с целью расширения области применения, повьпиения достоверности информации и надежности устройства, в него введены триггер, элемент ПСКЛЮЧАЮЩЕЕ ИЛИ, блок согласования, управляемый пере0
к. початс.чь, источник питания, б.кж памяти, приемник, передатчик, блок подключения к кабе.чю-тросу, выио. шенный в ви;;е одноконтактного герметизированного разъема,
выходы датчиков подключены к соответствующим информационным входам аналого- цифрового преобразователя, управляющий вход которого объединен с первыми входами передатчика и блока управления и под ключен к выходу управляе.мого перек. 1юча- теля, выход аналого-цифрового преобразова- те.1я соединен с вторым входом блока управления, выход источника питания подключен к входу блока памяти и первым входам таймера, управляемого переключате5 ля, триггера и приемника, выход приемника соединен с первым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, с вторым входом триггера и третьим входом блока управления, выход триггера подключен к второму входу управляемого переключателя, выход передатчика соединен с входом блока согласования и с вторым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подключен к четвертому входу блока управления, вход-выход которого соединен с вхо5 дом-выходом блока памяти, выход блока согласования подключен к второму входу приемника, выход таймера соединен с третьим входом управляемого переключателя, первый и второй выходы блока управления соединены с вторыми входами таймера и передат0 чика, третий выход подключен к четвертому входу управляемого переключателя и третьему входу триггера, вход-выход блока подключения подключен к входу-выходу блока согласования.
2. Устройство по п. I, отличающееся тем,
5 что блок согласования содержит первый и второй элементы гальванического разделения, резистор и транзистор, первый вход первого э,лемента гальванического раз.ае,1еиия является входом блока согласования, объеп диненные первый выход и второй вход первого элемента гальванического разделения, первый вход второго элемента гальванического разделения и эмиттер транзистора подключены к щине нулевого потенциала, второй выход первого элемента гальваничес5 кого разделения и первый вывод резистора соедипены с базой транзистора, первый выход второго элемента гальванического разделения подключен к коллектору транзистора, второй вход второго элемента гальванического разделения объединен с вторым вывбдом
0 резистора и является входом-выходом блока согласования, второй выход второго элемента гальванического разделения является выходом блока согласования.
us.2
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВАЯ КОМПЬЮТЕРИЗИРОВАННАЯ СТАНЦИЯ | 1997 |
|
RU2124741C1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| Устройство для ультразвукового измерения размеров глаза | 1986 |
|
SU1510842A1 |
| УСТРОЙСТВО ТЕЛЕМЕХАНИКИ | 1995 |
|
RU2111546C1 |
| Устройство для сопряжения абонента с линией связи локальной сети ЭВМ | 1989 |
|
SU1645962A1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ | 1996 |
|
RU2106679C1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ВОССТАНОВЛЕНИЯ ТЕХНИЧЕСКИХ СРЕДСТВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2072788C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения пространственно-временной изменчивости параметров водной среды. Цель изобретения - расширение области применения, повышение достоверности информации и надежности устройства. Устройство состоит из погружаемого контейнера 1, в котором размещены блок управления 2, блок памяти 3, источник питания 4, управляю- ш,ий переключатель 5, многоканальный аналого-цифровой преобразователь 6 с датчиками гидрофизических параметров 7, таймер 8, приемник 9, передатчик 10, триггер 12, блок согласования 13 и блок подключения, выполненный в виде одноконтактного герметизированного разъема 14, линий связи 15 и 16. После подачи питания блок управления 2 по состоянию триггера 12 определяет причину включения - по сигналу от таймера 8 или от бортовой ЭВМ - и переходит на выполнение операции соответствующей ветви программы-монитора, хранящейся в энергонезависимой памяти блока управления. Устройство может работать автономно или в режиме телеизмерения. Для этого в блоке согласования применена экономная по энергопотреблению схема последовательного приема и передачи по двухпроводной линии. Устройство может подключаться к любой ЭВМ, снабженной стандартным последовательным интерфейсом. 1 з. п. ф-лы, 2 ил. & (Л
| Парамонов А | |||
| Н | |||
| и др | |||
| Современные методы и средства измерения гидрологических параметров | |||
| Киев: Наукова думка, 1979, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
