Изобретение относится к измерительной технике и может быть использовано для измерения плоских углов простых призм,- многогранников, оптических лспиньев и других оптических элементов с плоскими отражающими поверхностями.
Целью изобретения является повышение точности измерений.
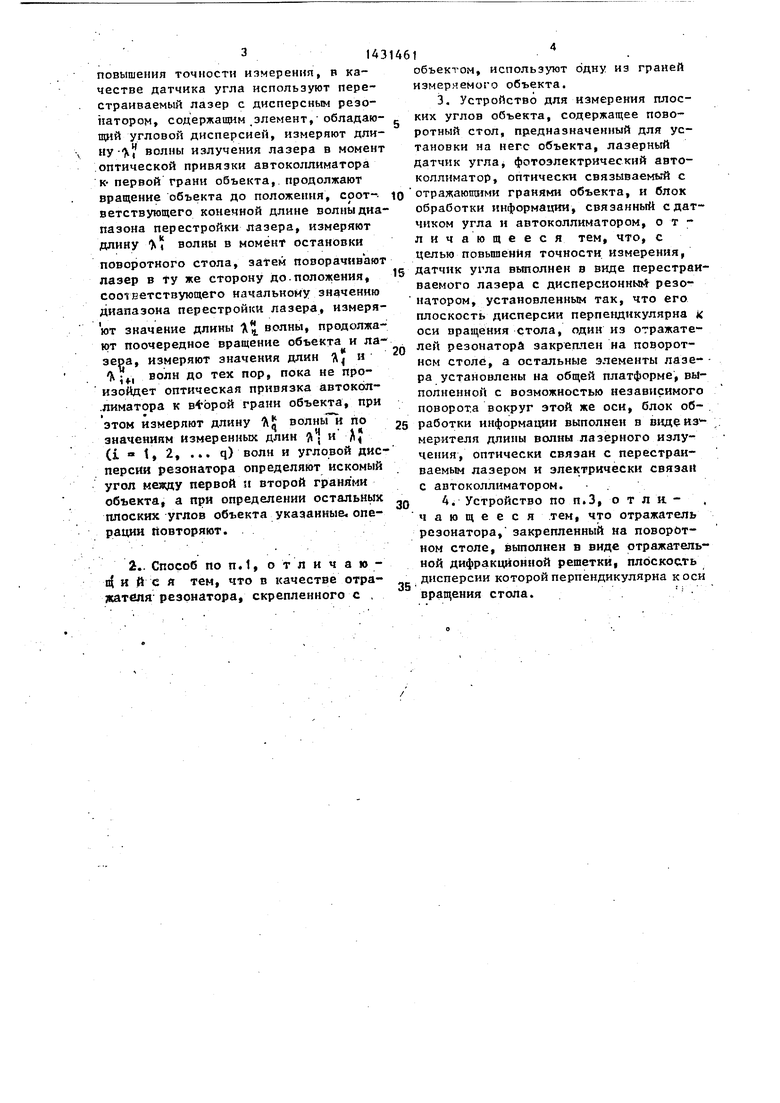
На чертеже представлено устройст- jg во для цзмерения плоских углов объекта.
Устройство содержит поворотный стол t, предназначенный для установки объекта 2, фотоэлектрический авто- 15 коллима.тор 3, оптически связанный с объектом 2( и перестраиваемый лазер с дисперсионным резонатором /элементы 4-7/, в котором отражатель 4 закреплен вблизи оси вращения поворот- 20 ного стола 1. Остальные элементы ла- . зера - дисперсионный элемент 5 (призма или дифракционная решетка), актив- Ное вещество 6 и выходной отражатель 7 установлены неподвижно относитель- 25 но друг друга. За выходным отражателем 7 расположен измеритель 8 длины эолны излучения, который оптически связан с лазером. Элементы 5-7 установлены на общей платформе 9, которая 30 имеет возможность независимого (от вращения стола 1) поворота вокруг об-. щей оси. Измеритель 8 электрически .связан с .автоколли;laTopом 3.
В качестве отражателя 4, -закреп-т 35 ленного на столе 1, может быть использована дифракционная решетка, работающая в автокоплимационном режиме. В этом случае отпадает необходимость - использования автономного элемента 5. 40 Решетка 4 вьтолняет одновременно функ-. ции дисперсионного элемента резонатора и перестраиваемого отражателя.
Способ измерения плоских углов .объекта с помощью устройства реали- 45 зуется .следующим образом. . На поворотном столе 1 устанавлива- .ют объект 2 так, чтобы нормали к отражающим граням бьши перпендикулярны « оси., вращения. Поворотную платформу 9 jg предварительно устанавливают относительно автоколлиматора 3 таким образом, чтобы в момент оптической привязки автоколлиматора к одной из граней объекта находился в пределах уг- jj левого диапазона перестройки дисперсионного резонатора. Включают источник накачки лазера (на чертеже не по- ка,за,н) . и приводят поворотный стол 1
с объектом 2 и отражателем 4 во вра- nieHue. В момент оптической привязки к первой грани объекта измеряют длину волны J излучения лазера, а затем Измеряют конечную длину волны Ok , lipH которой еще возможна устойчив.ая (Генерация (это значение длины волны приблизительно известно заранее для используемого типа перестраиваемого лазера, например, из зависимости выходной энергии излучения от длины .волны). Значение о пред а ля ют при остановленном поворотном столе 1. Затем поворачивают платформу 9 в направлении вращения стола 1 до положения, в котором длина волны соответствует начальному значению Ji J диапазона перестройки (это значение также лежит в заранее известной области). Продолжают вращение стола 1 с объектом 2 до конца диапазона перестройки и фиксируют значение , вновь поворачивают платформу 9 в ту же сторону до начала диапазона перестройки и фиксируют значение Л и так далее до тех пор, пока не произойдет оптическая привязка автоколлиматора 3 к второй грани объекта. В этот момент, используя связь автоколлиматора 3 с блоком 8, измеряется длина волны -/ Затем по сумме разнос тёй измеренных длин волн и известной угловой дисперсии резонатора определяют искомый угол между первой и второй гранями объекта. Это может быть сделано по заранее составленным номограммам, либо с помощью вычислительных средств, включенных в состав измерителя 8. Затем аналогичным образом определяются углы между остальными гранями объекта. . .,
л . .
В качестве отражателя 4 может быть использована и гра нь измеряемого, объекта (если коэффициент усиления активного вещества б лазера достаточно велик).
Ф ор м ула и 3 о бр е т е кия
1. Способ измерения плоских углов объекта, заключающийся в том, что вращают объект и связанный с ним лазерный датчик угла, фиксируют нормали к отражающим граням объекта с помощью автоколлиматора и определяют плоские углы объекта по выходным сигналам датчика угла и автоколлиматора, отличающийся тем, что, с целью
повышения точности измерения, в качестве датчика угла используют пере- страиваемьиЧ лазер с дисперсньм резонатором содержащим элемент, обладаю- щий угловой дисперсией, измеряют длину --Х волны излучения лазера в мокент оптической привязки автоколлиматора к- первой грани объекта, продолжают
объектом, используют одну из граней измеряемого объекта.
3. Устройство для измерения плоских углов объекта, содержащее поворотный стол, предназначенный для установки на неге объекта, лазерный датчик угла, фотоэлектрический автоколлиматор, оптически связываемый с
вращение объекта до положения, соот-. to ° Р ° П ми гранями объекта, и блок ветствующего конечной длине волны дна- обработки информация, связанный сдатчиком угла и автоколлиматором, отличающееся тем, что, с целью повышения точности измерения, 5 датчик угла выполнен в виде перестраиваемого лазера с дисперсионньо резо- натором, установленным так, что его
,плоскость дисперсии перпендикулярна j
ют значение длины г волны, продолжа- вращения стола, один из отражате- toT поочередное вращение объекта и лапазона перестройки лазера, измеряют длину волны в момент остановки
поворотного стола, затем поворачивают лазер в ty же сторону до.положения, соогйвтствующего начальному значению диапазона перестройки лазера, измеря20 лей резонатора закреплен на поворотном столе, а остальные элементы лазе- ра установлены на общей платформе, выполненной с возможностью независимого поворота вокруг этой же оси, блок обзера, измеряют значения длин и Х волн до тех пор, пока не произойдет оптическая привязка автокол- .лиматора к второй грани объекта, при этом измеряют длину волны и по значениям измеренных длин j и J (i t, 2, ... q) волн и угловой дисперсии резонатора определяют искомый угол между первой и второй граня ми объекта, а при определении остальных плоских углов объекта указанные, операции Повторяют.
2.. Способ по П.1, отличаю- 4 и и с я тем, что в качестве отражателя резонатора, скрепленного с ,
объектом, используют одну из граней измеряемого объекта.
3. Устройство для измерения плоских углов объекта, содержащее поворотный стол, предназначенный для установки на неге объекта, лазерный датчик угла, фотоэлектрический автоколлиматор, оптически связываемый с
вращения стола, один из отражате-
лей резонатора закреплен на поворотном столе, а остальные элементы лазе- ра установлены на общей платформе, выполненной с возможностью независимого поворота вокруг этой же оси, блок обработки информации выполнен в ввдеиз - мерителя длины волны лазерного излучения, оптически связан с перестраиваемым лазером и электрически связан с автоколлиматором.
4. Устройство по п.3, о т л я - чающееся тем, что отражатель резонатора, закрепленный на поворбт- ном столе, вьтолнен в виде отражательной дифракционной решетки, плоскость дисперсии которой перпендикулярна коси
вращения стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения плоских углов объекта | 1986 |
|
SU1500822A1 |
| Способ измерения угла поворота объекта | 1986 |
|
SU1422792A1 |
| ЛАЗЕРНАЯ СИСТЕМА И ДВУХИМПУЛЬСНЫЙ ЛАЗЕР | 1998 |
|
RU2144722C1 |
| ПЕРЕСТРАИВАЕМЫЙ ЛАЗЕР | 1992 |
|
RU2119705C1 |
| Устройство для подгонки плоских пленочных резисторов в номинал | 1980 |
|
SU953674A1 |
| ПЕРЕСТРАИВАЕМЫЙ ЛАЗЕР С ЛАЗЕРНОЙ НАКАЧКОЙ | 1988 |
|
SU1581170A1 |
| ЛАЗЕР С ПЕРЕСТРАИВАЕМЫМ СПЕКТРОМ ИЗЛУЧЕНИЯ | 2009 |
|
RU2399129C1 |
| Перестраиваемый лазерный резонатор | 2019 |
|
RU2701854C1 |
| Способ измерения углов между двумя отражающими поверхностями | 1987 |
|
SU1515038A1 |
| Оптический квантовый генератор | 1973 |
|
SU473475A1 |

Изобретение относится к области измерительной техники и может быть использовано для измерения плоских углов оптических деталей, содержащих плоские отраглаю1цие поверхности. Цель изобретения - повышение точности измерений. В качестве датчика угла используют перестраиваемьА лазер с дисперсионным резонатором. Один отражатель 4 резонатора закреплен на поворотном столе 1, а остальные элементы 5-7 лазера установлены на поворотной платформе 9. Стол 1 и платформа 9 выполнены с возможностью независимого вращения вокруг одной и той же оси. Оптическую привязку к граням объекта осуществляют с помоп1;ью автоколлиматора 3. В качестве блок;.: обработки информации 8 используют измеритель длины волны лазерного излучения, оптически связанный с лазером и электрически - с автоколлиматором 3. Вращают стол 1 с установлепным на нем объектом 2. В момент оптической привязки автоколлиматора 3 к первоР грани объекта 2 измеряют длину волны ft излучения лазера. Продолжают вращать стол 1 до положения, соответствующего конечной длине волны диапазона пе- рестройки лазера. Измеряют длину волны . Затем поворачивают в ту же сторону платформу 9 до положения, соответствующего начальной длине волны диапазон перестройки лазера. Измеряют длину волны . Продолжают поочередное вра1цение стола 1 и платформы 9, фиксируя значения 1 и Т( (i 1, 2, ... q) до положения, при котором происходит оптическая привязка автоколлиматора к второй грани объекта 2. Измеряют длину волны . Плоский угол меаду гранями объекта райи- тынают по измеренным интервалам длин волн -х ,91 f 1 и известной угловой дисперсии резонатора перестраиваемого Лазера, Аналоги 1но определяют плоские углы между остальными гранями объекта. 2с., 2 з,п.ф-лы, 1 ил. (Л С чягяяят
| Журнал Оптико-механическая про- мьшшенность, 1982, № 9, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
