tiu оо 00
114
Изобретение относится к способам автоматического управления процессами вырап-ивания мокроорганизмов, например кормовых дрожжей, и может быть использовано в микробиологической и химико-фармацевтической промышленности.
Цель изобретения - экономия питательных веществ.
Предлагаемьш способ предусматривает регулирование уровня в аппарате путем изменения подачи воды, отвода суспензии и концентрации питательных веществ путем подачи ее дозами. Кроме того, определяют время переработки очередной дозы, измеряют концентра- 1дию растворенного кислорода, определяют момент достижения ею заданной величины, в этот момент находят соотношение времени переработки предыдущей дозы к величине перерабатываемой дозы, запоминают это соотноше- -ние, сравнивают это соотношение с предыдущим соотноигением и подают очередную дозу, величину которой уста- навливают по результатам сравнения.
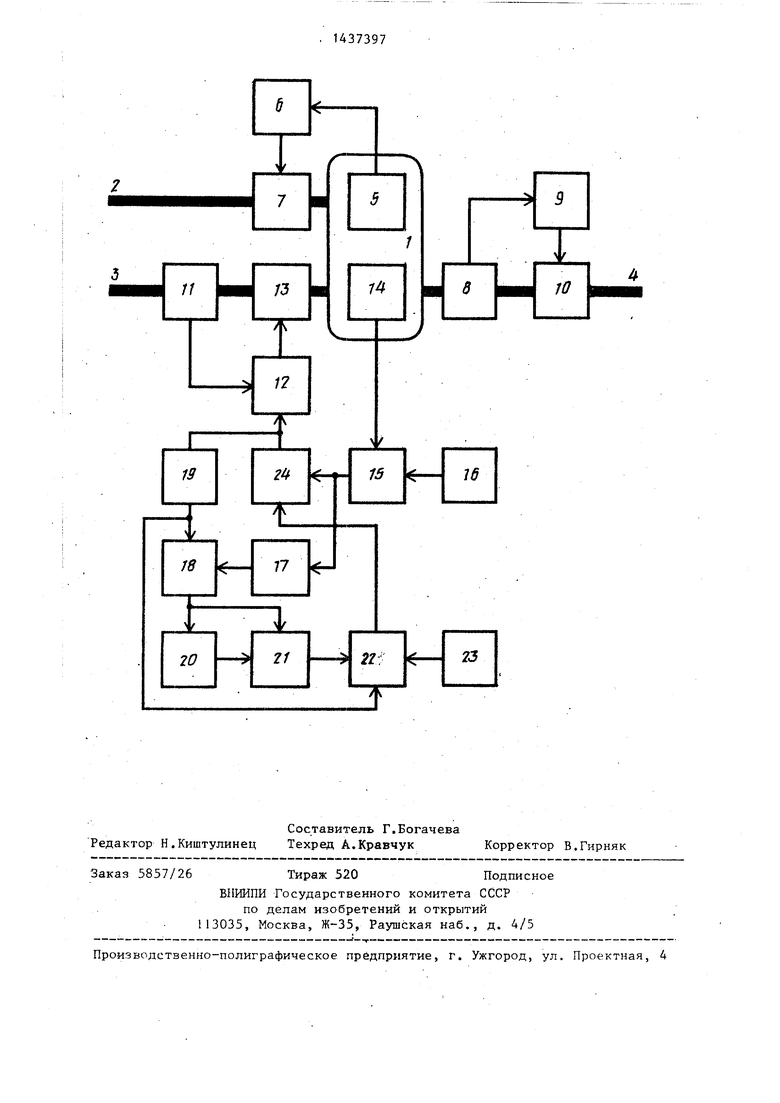
На чертеже приведена система автоматического управления, реализующая предлагаемый способ.
Система содержит ферментер 1, линии 2-4 подачи воды, питательного субстрата и отвода суспензии. Контур регулирования уровня содержит датчик ,5 уровня, регулятор 6 и исполнительный механизм 7, установленный на линии 2 подачн воды. Контто регулирования отвода суспензии содержит датчик 8 расхода на линии 4 отвода суспензии, регулятор 9 и исполнительный механизм 10 нэ линии 4 отвода суспензии Контур регулирования расхода питатель кого субстрата содержит датчик 11 расхода на линии 3 подачи питательного субстрата, регулятор 12 и исполни- тельньп механизм 13 на линии 3 подачи питательного субстрата. Система автоматического управления также содержит датчик 14 концентрации растворенного кислорода, установленный в ферментере 1, выходной сигнал которого поступает на первый вход блока 15 сравнения. На второй вход поступает сигнал от задатчика 16. Выходной сигнал блока 15 сравнения поступает на вход счетчика 17 времени. Выходной сиг нал счет чика 17 времени гтоступает на первый вход блока 18 деления, На второй вход этого блока гтоступает выходной cиf нaл первого блока 19 памяти Выход блока
20
73972
18 поступает на вход второго блока 20 памяти и на положительный вход сумматора 21. На отрицательный вход этого сумматора поступает выходной сигнал второго блока 20 памяти. Выходной сигнал сумматора 21 поступает на управляющий вход блока 22 управления знаком. На входы которого посQ тупают сигналы из первого блока 19 памяти и второго задатчика 23.Выходной сигнал блока 22 управления знаком поступает на вход формирователя 24 дозы, -на упрявляющий вход которого
г поступает сигнал блока 15 сравнения. Выходной сигнал формирователя 24 дозы поступает на вход задания регулятора 12 расхода питательных веществ , и на вход первого блока 19 памяти.
Система автоматического управления, реализующая предлагаемый способ рабо- тает следующим образом.
Уровень в аппарате регулирует регулятор 6 путем воздействия через
25 исполнительный механизм 7 на расход воды. Отвод суспензии регулирует регулятор 9 путем воздействия через исполнительный механизм 10 на расход суспензии. Расход питательного суб-р. страта регулирует регулятор 12 путем воздействия через исполнительный механизм 13 на расход питательного субстрата. Концентрация растворенного кислорода в ферментере 1 измеряется датчиком 14 растворенного кислорода.
При лимитации роста микроорганизмов маяой концентрацией питательного субстрата растворенный кислород потребляется микроорганизмами неинтенсивно и его концентрация повышается,При достижении ею определенного уровня, заданного задатчиком 16, на выходе блока 15 сравнения возникает сигнал, по которому формирователь 24 дозы выдает сигнал дозы фиксированной длительнос45 ти и рассчитанной амплитуды на вход задания регулятора 12 концентрации питательного субстрата. Амплитуда этого сигнала рассчитывается следующим образом. Временной интервал между
50 предыдущим и текущим выходными сигналами блока 15 сравнения, т.е. время переработки дозы, подсчитывается счетчиком 17 времени. Амплитуда предыдущей дозы хранится в первом блоке 55 19 памяти. Елок 18 деления рассчитывает соотношение времени переработки дозы к величине дозы. Прельщчтдее значение этого соотношения хранится в втором блоке 20 памяти, В сумматоре
40
21 рассчнтьшается разница между теку- И1ИМ значением соотношения и его предыдущим значением. Знак этой разницы управляет работой блока 12 управления знаком. Этот блок работает следующим образом. На его входы поданы сигналы первого блока 19 памяти и второго за- датчика 23, которые суммируются. При поступлении плюса на управляющий вход блока 22 управления знаком знак входного сигнала из задатчика 23 меняется на противоположный и сохраняется таким до поступления следующего плюса на управляющий вход. При поступлении минуса сохраняется знак предудущего суммирования. Таким образом ведется поиск амплитуды дозы, при которой соотношение времени переработки дозы к величине дозы становится минимальным. Второй задатчик 23 хранит информацию о величине шаг этого поиска.
Предлагаемый способ осуществляли
среды 4,1. Концентрацию растворенного кислорода измеряли мембранным элект-- родом, концентрацию биомассы и оста- точного субстрата - лабораторными методами.
Данные приведены в таблице. Таким образом, экономия питательного субстрата составляет в среднем 10 14,7%.
Формула изобретения
Способ автоматического управления 15 процессом непрерывного выращивания микроОр ганизмов, предусматривающих регулирование уровня в аппарате путем изменения подачи воды, концентрации питательного субстрата в аппарате 20 путем изменения его подачи и отвода суспензии, отличающийся тем, что, с целью экономии питательного субстрата, измеряют концентрацию
рас гворенного кислорода, устанавлива- в ферментере емкостью 3 л, подключен- 25 ют момент достижения его заданного ном к управляющей микро-ЭВМ, Проводи- значения и находят в этот установлен- щ культивирование дрожжей Candida ный момент соотношение времени пере- guilliermondii на углеводородном субст- работки предыдущей дозы питательного рате. Питательная среда также содер- субстрата к величине перерабатываемой жала необходимьш для роста клеток зо Д°зы, сравнивают полученное соотноще- микро- и макроэлементы в нелимитирую ние с предьдущим, а величину подавае- щих концентрациях. Непрерывное культи- мой дозы устанавливают по результату
среды 4,1. Концентрацию растворенного кислорода измеряли мембранным элект-- родом, концентрацию биомассы и оста- точного субстрата - лабораторными методами.
Данные приведены в таблице. Таким образом, экономия питательного субстрата составляет в среднем 14,7%.
Формула изобретения
Способ автоматического управления процессом непрерывного выращивания микроОр ганизмов, предусматривающих регулирование уровня в аппарате путем изменения подачи воды, концентрации питательного субстрата в аппарате путем изменения его подачи и отвода суспензии, отличающийся тем, что, с целью экономии питательного субстрата, измеряют концентрацию
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления циклическим процессом непрерывного выращивания микроорганизмов | 1986 |
|
SU1328378A1 |
| Система автоматического управления циклическим процессом непрерывного выращивания микроорганизмов | 1986 |
|
SU1392097A1 |
| Система автоматического управления процессом непрерывного выращивания микроорганизмов | 1981 |
|
SU983668A1 |
| Система автоматического управления процессом непрерывного выращивания микроорганизмов | 1989 |
|
SU1648981A1 |
| Система автоматического управления циклическим процессом непрерывного культивирования микроорганизмов | 1987 |
|
SU1442551A1 |
| Система автоматического управления периодическим процессом биосинтеза микроорганизмов в ферментере | 1980 |
|
SU940144A1 |
| Способ автоматического управленияпРОцЕССОМ НЕпРЕРыВНОгО КульТиВиРОВАНияМиКРООРгАНизМОВ и СиСТЕМА дляЕгО ОСущЕСТВлЕНия | 1979 |
|
SU810802A1 |
| Система автоматического управления полупериодическим процессом культивирования аэробных микроорганизмов | 1988 |
|
SU1599436A1 |
| Способ автоматического управления процессом выращивания микроорганизмов | 1990 |
|
SU1747492A1 |
| Система автоматического управления полупериодическим процессом культивирования микроорганизмов | 1986 |
|
SU1493674A1 |
. Изобретение относится к способам автоматического управления процессами вырапдавания микроорганизмов, например кормовых дрожжей, и может быть использовано в микробиологической и химико-фармацевтической промьшшеннос- ти. Целью изобретения является экономия питательных веществ. Это достигается путем подачи питательных веществ дозами по достижении концентрацией растворенного кислорода заданного уровня, причем величина очередной дозы зависит от времени переработки предьщущей дозы и величины предьду- щей дозы. 1 табл., 1 ил.
вирование производили при 34 С и рН
С подачей субстратадозами 102,8 83,6 1,23 118,4 91,8 1,29
100,5 79,1 1,27
С непрерывной подачейсубстрата 120,0 77,91,54
150,0 170,0
106,4 114,1
1,41 1,49
сравнения.
1,26
1,41 1,49
1,48
tH
| Способ автоматического управления процессом выращивания микроорганизмов | 1983 |
|
SU1116060A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
