Известны комллексные системы телемеханики }ia бесконтактных элементах с Использованием частотно-временного кода для унравления промышленными объектами.
Предлагаемая комллексная система телемеханики отличается тем, что для обеспечения передачи сигналов по любому каналу связи с циклической синхронизацией распределителей объектов с диспетчерского пункта в нужный момент времени в нем применены блоки формиров ателей на диспетчерском и контролируемом пунктах и блоки селекторов-ка контролируемом пункте.
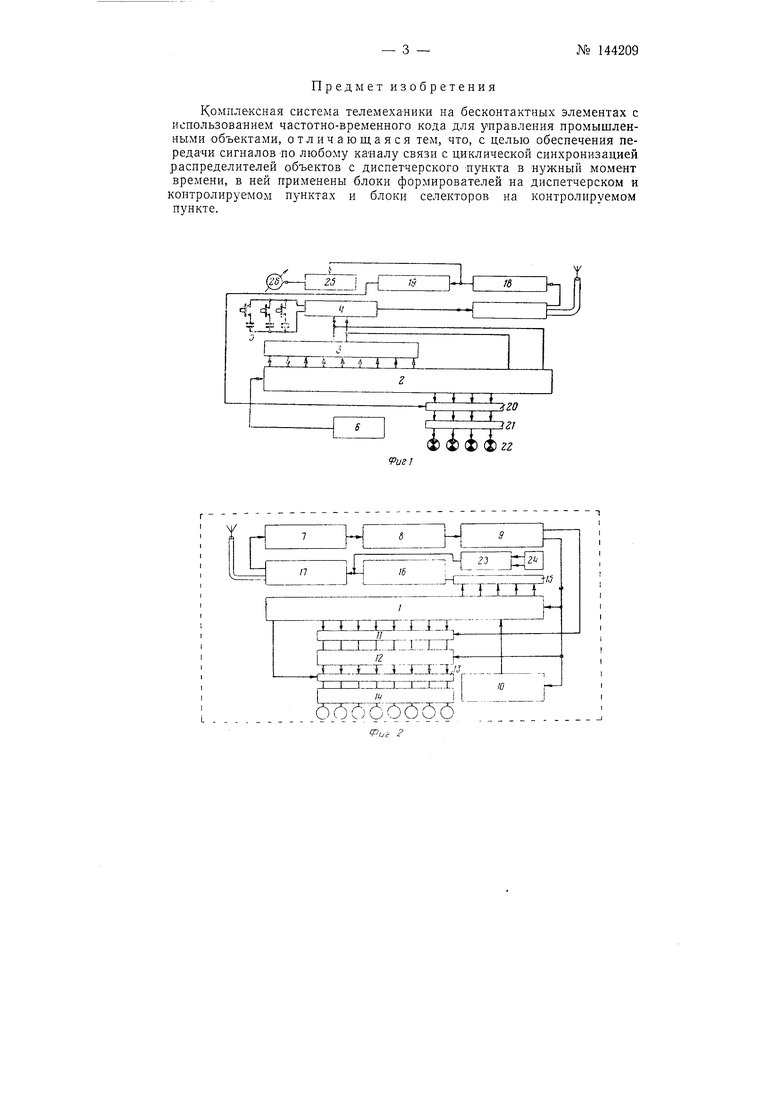
На фиг. 1 показана функциональная схема диспетчерского пункта описываемой комплексной системы телемеханики; на фиг. 2 - функциональная схема контролируемого пункта.
В описываемой системе принят время-импульсный метод выбора объектов ъ пределах одного контролируемого пункта п частотный метод выбора одного из контролируемых пунктов. Число элементов распределителя / (фиг. 2) каждого контролируемого -пункта определяется суммой сигналов управления, сигнализации и измерения. Число элементов распределителя 2 (фиг. 1) диспетчерского пункта выбирается равным наибольшему числу элеме 1тов в распределителях контролируемых пунктов. Распределитель 2 замкнут в кольцо, а элементы распределителя / разомкнуты И запускаются синхронизирующим импульсом в начале каждого цикла работы распределителя 2.
Работа диспетчерского пункта происходитследующим образом. Для выбора нужного контролируемого пункта нажимается соответствующая кнопка на пульте 5 управления, подключающая к генератору несущей частоты формирователя 4 одну из емкостей 5, соответственно изменяющую частоту генератора. На каждом цикле работы распределителя 2 на формирователь 4 поступают импульсы от первого и третьего
144209
элементов распределителя. Формирователь вырабатывает синхронизирующий импульс в виде пачки частоты генератора длительностью, равной времени задерлжи им пульса при переходе от первого до третьего элемента распределителя.
Передача сигпала управления осуществляется подключением двух соседних элементов распределителя 2 к генератору формирователя 4. При этом в канал связи выдается импульс Б виде пачки частоты генератора длительностью, равной половине длительности синхронизирующего импульса. Время задержки командного импульса относительно синхронизирующего определяет номер выбора -команды на контролируемом пункте.
Таким образом, в канал связи (например, через передатчик) выдаются не импульсы распределителя 2, а паузы между ними, заполненные частотой, соответствующей выбранному контролируемому пункту. При этом длительность паузы и, следовательно, частота в канале связи легко регулируется частотой генератора 6 тактовых импульсов, питающих распределитель, что дает возможность использовать любой канал связи (проводной, радиоканал, уплотненный ВЧ канал).
Работа контролируемого пункта происхадит следующим образом. Поступающий в приемник 7 частотный признак расщифровывается фильтрОМ 8. Синхронизирующий импульс, выданный селектором 9, поступает на первый элемент распределителя 1 и одновременно запускает генератор }0 тактовых импульсов. Сигнал управления открывает клапат1Ы // на выходе распределителя, и импульс с элемента распределителя, совпадающий с импульсом управления, проходит в запоминающее устройство 12. Импульс с последнего элемента распределителя поступает В схему 13. считывающую сигнал с запомииающего устройства на выходные реле 14.
Ответная сигнализация осуществляется подключением соответствующих элементов распределителя / контактами 15 исполнительного механизма к формирователю 16. Последний выдает в передатчик 17 код телесигнализации, состоящий из серии импульсов, следующих один за другим с заполнением частотой данного контролируемого пункта.
Па диспетчерском пункте принятые приемником 18 сигналы проходят через соответствующий фильтр 19 (на фиг. 1 показаН только один из них) и далее на клапаны 20. Количество фильтров и кла-панов равно числу контролируемых пунктов в системе. При поступлении на клапаны 20 импульсов с соответствующих элементов распределителя 2 принятые сигналы через сигнальные реле 2} поступают на сигнальные ла мпочки 22.
Вызов телеизмерения осуществляется аналогично передаче сигнала управления. По сигналу вызова генератор 23 частоты телеизмерения подключается к каналу связи вместе с соответствующим датчиком 24. Генератор вырабатывает частоту с дивиапией ±5% в зависимости от изменения измеряемой величины.
Частота телеизмерения, принятая на диспетчерском пункте, поступает на частотомер 25 и затем на измерительный прибор 26, шкала которого проградуирована в единицах измеряемой величины.
Таким образОМ, описываемая система телемеханики обеспечивает передачу сигналов по любому каналу связи с циклической синхронизацией распределителей объектов С диспетчерского пункта в нужный момент времени, что расширяет возможности ее практического использования.
Предмет изобретения
Комплексная система телемеханики на бесконтактных элементах с использованием частотно-временного кода для управления промышленными объектами, отличающаяся тем, что, с целью обеспечения передачи сигналов -по любому каналу связи с циклической синхронизацией распределителей объектов с диспетчерского пункта в нужный момент времени, в ней применены блоки формирователей на диспетчерском и контролируемом пунктах и блоки селекторов на контролируемом пункте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Многоканальная время-импульсная телеизмерительная система | 1984 |
|
SU1288738A1 |
| УСТРОЙСТВО для ТЕЛЕИЗМЕРЕНИЯ | 1972 |
|
SU337799A1 |
| Устройство контролируемого пункта системы телемеханики | 1986 |
|
SU1374266A1 |
| Многоканальная телеизмерительная система | 1985 |
|
SU1357993A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Устройство многоканального радиотелеуправления промышленными объектами, в частности, действующими нефтяными скважинами | 1957 |
|
SU122416A1 |
| Устройство пункта управления системы телемеханики | 1986 |
|
SU1374265A1 |
| Устройство для передачи информации в системе телесигнализации | 1987 |
|
SU1509968A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ СИГНАЛОВ ПО ТРУБОПРОВОДНОМУ КАНАЛУ | 1969 |
|
SU240818A1 |
25
19
С
го
t t f t
2Zf
zz
