Фиг.1
1145508
Изобретение относится к средствам - виброэащиты различных объектов в машиностроении, приборостроении и других отраслях промьшшенности.
Цель изобретения - повышение эффективности виброизоляции за счет увеличения рабочего хода виброизолятора.
На фиг. 1 приведен общий вид виб- ю
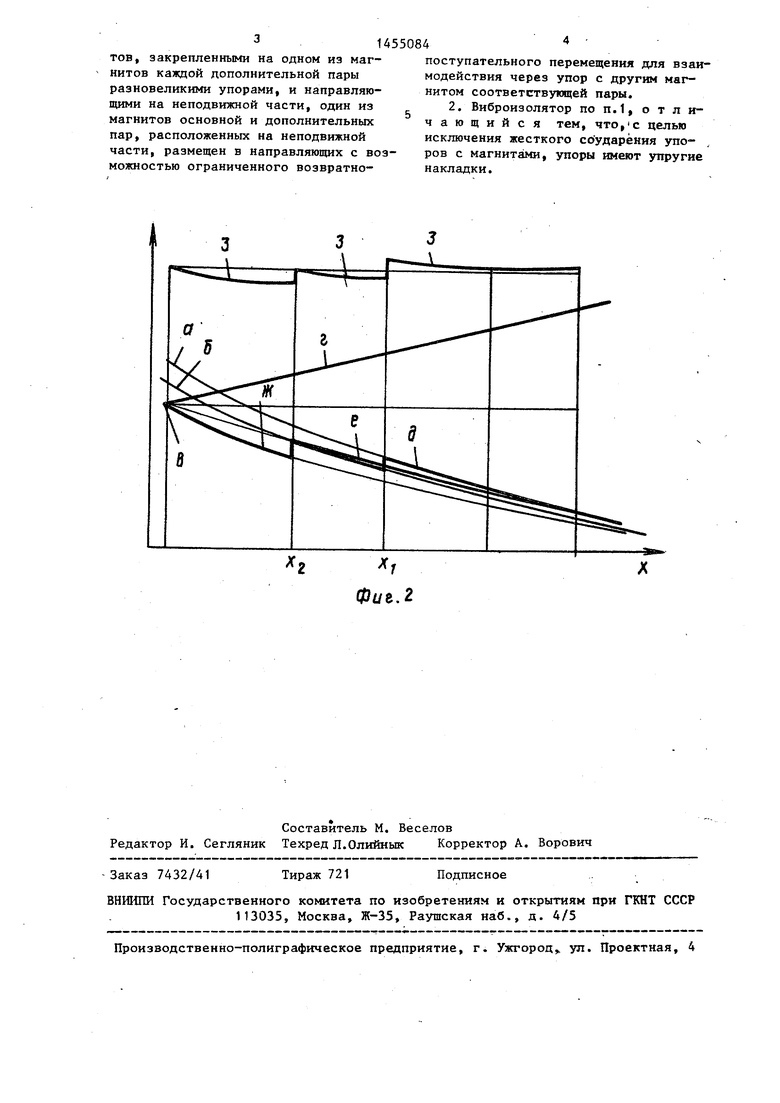
роизолятора (продольный разрез)Jна фиг. 2 - графики формирования упругой характеристики виброиэолятора,
Вибронзолятор содержит неподвижную часть t, закрепленную на вибри- 15 рующем основании (не показано),и подвижной части 2, соединяемой с защищаемым объектом (не показан),
На части 1 в направляющих с возможсовмес тно с упругой характеристикой второй пружины 5 обеспечивает достаточно протяженный участок пониженной жесткости на упругой характеристике виброизолятора в целом, так как изменение силы взаимодействия магнитов 3 и А компенсируется изменением силы второй пружины 5,
На фиг. 2 показаны в зависимости от деформации виброизолятора действующие на подвижную часть 2 силы: а, f, & со стороны шести, четырех и двух пар магнитов соответственно; 2-- со стороны второй пружины; , е , Э14- со стороны магнитной пружины; г - со стороны магнитной и второй пружин
При максимальном рабочем значении расстояния X упоры 6 не соприкасают
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолятор | 1986 |
|
SU1362876A1 |
| ПРУЖИННЫЙ ВИБРОИЗОЛЯТОР | 1995 |
|
RU2112899C1 |
| УСТРОЙСТВО ВИБРОИЗОЛЯЦИИ С АРРЕТИРОВАНИЕМ | 2012 |
|
RU2499924C1 |
| Магнитный виброизолятор | 1988 |
|
SU1597464A1 |
| ВИБРОИЗОЛЯТОР | 2004 |
|
RU2264569C1 |
| Нелинейный амортизатор | 1977 |
|
SU750172A1 |
| ВИБРОИЗОЛИРУЮЩАЯ МАГНИТНАЯ ОПОРА (ВАРИАНТЫ) | 2011 |
|
RU2477399C1 |
| ВИБРОИЗОЛЯТОР | 2004 |
|
RU2270386C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ | 2017 |
|
RU2653929C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ КОЧЕТОВА | 2016 |
|
RU2627042C1 |
Изобретение относится к средствам виброэащиты различных объектов в машиностроении, приборостроении и других отраслях промьшшенности.Целью изобретения является повьш1ение эффективности виброизоляций за счет увеличения рабочего хода виброизолятора. При уменьшении деформации X виброизолятора упоры 6 последовательно вступают в контакт с постоянными магнитами 3, размещенными в направляющих. Магниты, взаимодействующие через упор, не оказывают влияния на упругую характеристику магнитной пружины, образованной соответствующими парами .магнитов 3 и 4, обращенных разноименными полюсами один к другому. Таким образом, при относительном движении частей 1 и 2 корпуса виброизолятора с помощью упоров 6 осуществляется последовательный переход с одной суммарной упругой характеристики сил взаимодействия пар магнитов на другую. Это позволяет получить такую упругую характеристику магнитной пружины, которая совместно с упругой характеристикой второй пружины 5 обеспечивает достаточно протяженный участок пониженной жесткости виброизолятора в целом. 1 3.п. ф-лы, 2 ил. (Л 5 S
ностью ограниченного возвратно-посту- 20 ся с магнитами 3. При уменьшении рас
пательного перемещения размещены постоянные магниты 3, а на части 2 жестко закреплены постоянные магниты 4.
I
Соответствзгющив постоянные магниты. 3 и 4 обращены разноименными полюсами один к другому и образуют магнитные пружины. Параллельно магнитным пружинам установлена вторая пружина 5 (например, витая цилиндрическая пружина с постоянной жесткостью) . На одном из магнитов каждой пары закреплены разновеликие упоры 6, имеющие на своих свободных концах упругие накладки 7.
Виброизолятор работает следующим образом.
При уменьшении деформации X виброизолятора упоры 6 последовательно вступают в контакт с магнитами 3, вынуждая их двигаться совместно с упорами. При этом, сила взаимодействия той пары магнитов 3 и 4, первый магнит которой 3 контактирует с одни из упоров 6, полностью воспринимается упором и не оказывает влияния на упругую характеристику всей магнитной пружийы и виброизолятора в целом При увеличении деформации X работа виброизолятора протекает в обратном порядке. Таким образом, при относительном движении частей 1 и 2 корпуса виброизолятора с помощью упоров 6 осуществляется последовательный переход с одной суммарной упругой характеристики сил взаимодействия па магнитов на другую (при значениях деформации Xj и Х на фиг. 2). Это позволяет получить такую упругую характеристику магнитной пружины, которая
5
0
5
0
5
0
стояния часть Э характеристики магнитной пружины совпадает с линией 6L до тех пор, пока расстояние х не получит значение х , . При х X,, один из упоров 6 вступает в контакт с находящимся напротив него одним из магнитов 3 и исключает из работы соответствующую пару магнитов, обеспечивая тем самым переход характеристики магнитной пружины с части Э на часть е 9 совпадающую с линией Г. Затем при X 5 Х, аналогично осуществляется переход характеристики магнитной пружины с части е на часть эю т.д. Этим обеспечивается получение требуемого вида характеристики магнитной пружины из условий обеспечения виброизоляции защищаемого объекта и устойчивости виброизолятора. Упругие накладки 7 на свободных концах упоров 6 обеспечивают увеличение плавности включения и вьпслючения пар магнитов .
Формула изобретения
Заказ 7432/41
Тираж 721
ВНШШИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,, ул. Проектная, 4
поступательного перемещения для взаимодействия через упор с другим магнитом соответствующей пары.
фуе.2
Подписное
| Нелинейный амортизатор | 1977 |
|
SU750172A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
