1
Изобретение относится к промысловой геофизике и может применяться для получения скважинных параметров в единой координате по оси глубин без пропусков и перекрытий.
Целью изобретения является повышение качества регистрации путем исключения записи неинформативных данных, фиксируемых при перепуске каротажного кабеля.На фиг.1 представлены каротажные диаграммы; на фиг.2 - структурная схема устройства, реализующего способ .
Па фиг.1 показаны основная кривая I, регистрируемая при подъеме каротажного зонда, кривая II,регистрируемая также на подъеме, но в интервале перепуска. Прямоугольниками одинаковой ширины на кривых I и II отмечены кадры регистрируемой информации. На позиции III дан пример сопоставления кадра, зафиксированного на .кривой I, и т-екущего кадра на кривой II. 0 - точка начала перепуска., 0 - точка конца перепуска и начала подъема зонда, Oj - искомая точка разреза, идентичная 0, с которой нужно возобновить запись каротажной диаграммы.
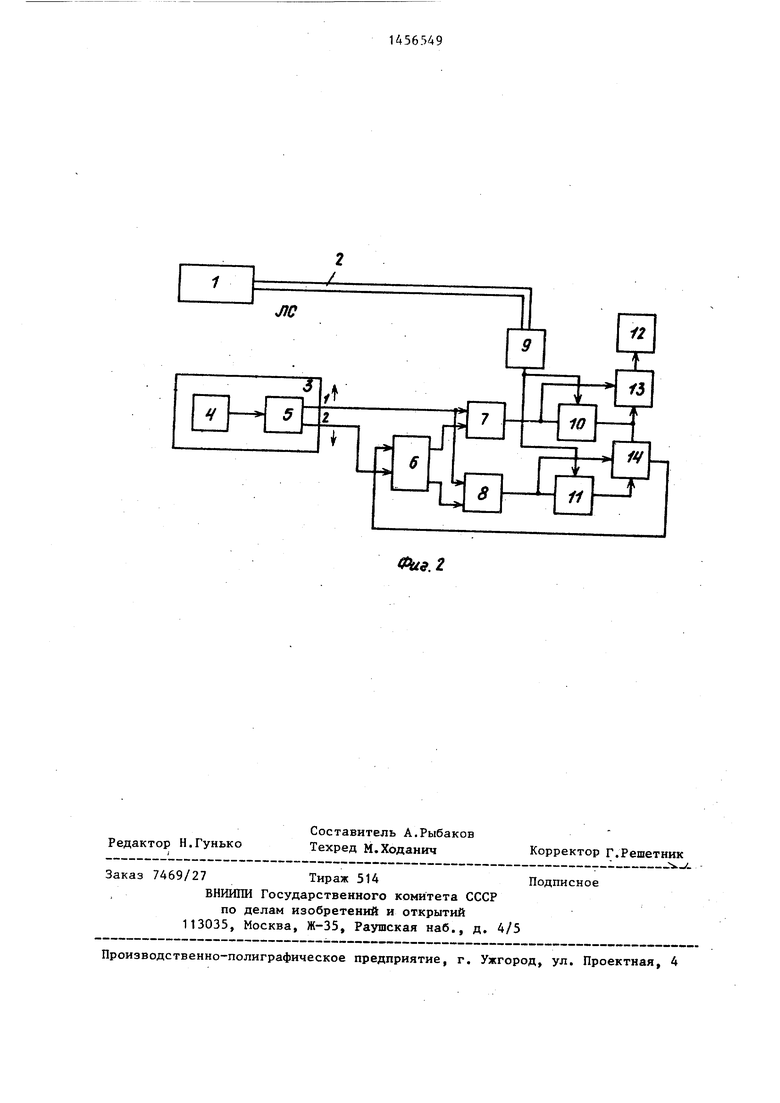
Устройство, реализующее способ регистрации каротажных данных в функции глубины скважины, содержит измерительный (каротажный) зонд 1, подключенный к линии 2 связи, глубиномер 3, включающий датчик 4 глубин и блок 5 определения направления движе
ния измерительного зонда 1, триггер 6. управления, первый и второй элементы 7 и 8 совпадения, преобразователь
9аналог-код, основной и вспомога- тельный кадровые запоминающие блоки
10и 11, регистратор 12, регистр 13 и блок 14 сравнения.
Первый выход глубиномера 3 соединен с первыми входами первого и второго элементов 7 и 8 совпадения, вторые входы которых соответственно подключены к прямому и инверсному выходам триггера 6 управления, первый вход котрого соединен с вторым выходом глубиномера 3, второй, вход подключен к первому выходу блока 14 сравнения, первый вход которого соединен с выходом второго элемента 8 совпадения и входом вспомогательного запоминающего блока 11, выход которого подключен к второму входу блока 14 сравнения, информационный вход соединен с выходом преобразователя 9 и информационным
входом основного запоминающего блока 10, вход которого подключен к выходу первого элемента 7 совпадения и управляющему входу региртра 13, вход которого соединен с выходом основного запоминающего блока 10 и вторым выходом блока 14 сравнения, а выход подключен к регистратору 12.
Способ регистрации каротажных данных в функции скважины осуществля- ется следующим образом.
При подъеме каротажного зонда 1 с забоя скважины производится запись каротажной кривой в масштабе глуби
ны скважины и с дискретом, равньм шагу квантования по глубине. Записываемая информация последовательно, пропускается через кадр определенной ширины (по. оси глубин), т.е. имеющий заданное число дискретов такое, что отрезок каротажной кривой внутри кадра является распознаваемым по своей конфигурации. Например, для среднедифференцированного разреза достатт1но выбрать кадр шириной, соответствующей 2 м разреза скважины. При шаге квантования по глубине 0,1м в кадре получается 20 точек (слов). Каждое последующее значение регис- . трируемого параметра вписывается в последнее слово кадра, при этом первое слово выталкивается из кадра и подается на регистрацию. Таким образом, через кадр проходят все измеряемые при подъеме значения параметра. В процессе каротажа возможны и часто встречаются ситуации, связанные с необходимостью остановки каротажа. Это влияние всевозможных помех, дефекты в работе аппаратуры, непредвиденные нарушения технологии каротажных работ и др. Чтоб не потерять связь между ранее записанной и вновь записываемой информациями, осуществляют перекрьугие записанной кривой путем перепуска каротажного зонда, т.е. спуска его на глубину большую, чем глубина останова записи.
При записи каротажных диаграмм на диаграммной ленте получается повторение записи интервала перепуска, что нарущает масштаб записи по оси глубин, приводит к необходимости редактирования диаграмм, снижает оперативность обработки. .Поэтому необходимо уже в процессе регистрации обеспечить получение качественной каротажной диаграммы с единым отсчетом глубин на всем интервале глубин каротажа. Это обеспечивается предлагаемой последовательностью операций;
При остановке регистрации (точка 0) последний кадр записи кривой I фиксируется и не изменяется в процессе всей операщ-:-. перепуска кабеля, когда зонд 1 до.стигает точки О затем поднимается вверх..
20
25
2.
вой II меняется и для каждого новог кадра производится его сопоставлени с кадром, зафиксированным на кривой g Пример такого сопоставления показан на позиции III. Как видно из вариан та, приведенного на фиг.1, совпадение фиксируется при достижении неко торой точки-Oj, которая по разрезу 10 скважины совпадает с точкой 0, а п кривой II смещена относительно глуб ны точки 0 на кривой I вследствие различных возможных- причин, например неодинаковой деформации кабеля при 15 спуске и подъеме. По фактору совпадения указанных кадров регистрация основной кривой I продолжается. В результате достигается корректировка каротажной кривой с учетом информации, полученной на интервале перепуска, но без ее регистрации, что позволяет непосредственно на буровой получить качественный материал для оперативной интерпретации данных каротажа.
Устройство, реализующее способ, работает следующим образом.
Значения геофизического параметра от зонда 1, переданные по линии.2свя 30 зи, кодируются преобразователем 9 и подаются на кадровые запоминающие блоки. 10 и 11. Запись информации осуществляется только в одно из них в зависимости от состояния триггера 6 управления.
При подъеме каротажного зонда 1 с забоя сигналы меток глубин с глубиномера 3 (выход 1) через первый элемент 7 совпадения поступают на основной запоминающий блок 10, куда и записывается информация с преобразователя 9, одновременно эти же сигналы подаются на регистр 13, принимающий последовательность кодов значений 45 параметров, которые прошли через кадровый запоминающий блок 10, т.е. как бы вытолкнуты .из него. Эти коды,, представляющие собой дискретные зна- чения кривой I (фиг.1), записываются 50 регистратором 12.
При перепуске на первом же шаге спуска зонда 1 триггер 6 управления опрокидывается и подготавливает цепь записи данных во вспомогательный ко35
40
DW ouiiunui d J елъныи ко
При подъеме каротажного зонда 1 на довый запоминающий блок 11. Это про- интервале перепуска формируется ана- „сходит при подъеме зонда 1 на интер- логичньш по ширине кадр, как для,- але перепуска (начиная с точки 0,
фиг.1). Таким образом, кадр в блоке 10 зафиксирован, а в блоке 11 являеткривой I. На каждом шаге квантования по глубине содержимое кадра для кри
20
25
456549
вой II меняется и для каждого нового кадра производится его сопоставление с кадром, зафиксированным на кривой 1. g Пример такого сопоставления показан на позиции III. Как видно из варианта, приведенного на фиг.1, совпадение фиксируется при достижении некоторой точки-Oj, которая по разрезу 10 скважины совпадает с точкой 0, а по кривой II смещена относительно глубины точки 0 на кривой I вследствие различных возможных- причин, например неодинаковой деформации кабеля при 15 спуске и подъеме. По фактору совпадения указанных кадров регистрация основной кривой I продолжается. В результате достигается корректировка каротажной кривой с учетом информации, полученной на интервале перепуска, но без ее регистрации, что позволяет непосредственно на буровой получить качественный материал для оперативной интерпретации данных каротажа.
Устройство, реализующее способ, работает следующим образом.
Значения геофизического параметра от зонда 1, переданные по линии.2свя- 30 зи, кодируются преобразователем 9 и подаются на кадровые запоминающие блоки. 10 и 11. Запись информации осуществляется только в одно из них в зависимости от состояния триггера 6 управления.
При подъеме каротажного зонда 1 с забоя сигналы меток глубин с глубиномера 3 (выход 1) через первый элемент 7 совпадения поступают на основной запоминающий блок 10, куда и записывается информация с преобразователя 9, одновременно эти же сигналы подаются на регистр 13, принимающий последовательность кодов значений 45 параметров, которые прошли через кадровый запоминающий блок 10, т.е. как бы вытолкнуты .из него. Эти коды,, представляющие собой дискретные зна- чения кривой I (фиг.1), записываются 50 регистратором 12.
При перепуске на первом же шаге спуска зонда 1 триггер 6 управления опрокидывается и подготавливает цепь записи данных во вспомогательный ко35
40
DW ouiiunui d J елъныи ко
довый запоминающий блок 11. Это про- „сходит при подъеме зонда 1 на интер- але перепуска (начиная с точки 0,
5
ся текущим. Блок .14 сравнения по сигналам с элемента 8 совпадения, формируемым по сигналам глубин с первого выхода глубиномера 3 производит последовательное сопоставление зафикси- рованног.о и текущего кадров. Критерий совпадения может быть, например, таков:
14
- А
« А
ср
S где п - число дискретов в кадре;
А - значение параметров в текущем и зафиксированном кадре; допустимая относительная погрешность измерений. При фиксации совпадения с блока 14 сравнения на триггер 6 управления подается команда, восстанавливающая его исходное состояние. При этом элемент 8 закрывается, а элемент 7 открывается, и продолжается регистрация основной кривой в описанной последовательности.
Изобретение позволяет получить тех технико-экономический эффект за счет сокращения операции редактирования первичных каротажных диаграмм и повышения их качества.
Формула изобретения
1. Способ регистрации каротажных да.нных в функции глубины скважины, включающий протяжку носителя записи в зависимости от перемещения измерительного зонда в скважине и .регистрацию на этот носитель значений геофизического параметра, возобновление регистрации после перепуска каротажного кабеля, отличающийся тем, что, с целью повьщ1ения качества регистрации путем исключения записи неинформативных данных, фиксируемых при перепуске каротажного кабеля, вьщеляют на каротажной кривой, исходя из характера разреза, минимально вбзможный распознаваемый по конфигурации кадр по оси глубин, фиксируют последний кадр при остановке измерительного зонда,при восстановлении преж
-
о 565496
него направления перемещения измерительного зонда,после перепуска каротажного кабеля производят временное запоминание информа1Д1и в пределах текущего кадра и последовательное сопоставление его с зафиксированным кадром, а возобновление регистрации осуществляют при совпадении информа10 ции текущего кадра с информацией зафиксированного кадра.
2. Устройство для регистрации каротажных данных в функции глубины скважины, содержащее глубиномер,
15 включающий датчик глубин и блок определения направления движения измерительного зонда, преобразователь аналог-код, соединенный линией связи с измерительным зондом, регистр, блок
20 сравнения и регистратор, отличающееся тем, что, с целью повьшения качества регистрации путем исключения неинформативных данных, фиксируемых при перепуске каротажно25 го кабеля, оно снабжено основным и вспомогательным кадровыми запоминающими блоками, триггером управления, первым и вторым элементами совпаде- ния, причем пёрвьш выход глубиноме30 ра соединен с первыми входами первого и второго элементов совпадения, вторые входы которых, соответственно, подключены к прямому и инверсному выходам триггера управления, первый вход которого соединен с -вторым выходом глубиномера, второй вход подключен к первому выходу блока сравнения, первый вход которого сое динен с выходом .второго элемента совпадения и.входом вспомогательного кадрового запоминающего блока, выход которого подключен к второму входу блока совпадения, информационный вход соединен с выходом.преобразова g теля аналог-код и информационным входом основного кадрового запоминающего блока, вход которого подключен к выходу первого элемента совпадения и управляющему входу, регистра, вход которого соединен с выходом основного кадрового запоминающего блока и вторьгм выходом блока сравнения, а выход подключен к регистратору.
35
40
50
9.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ согласования по глубине кривых геофизических параметров и устройство для его осуществления | 1987 |
|
SU1518497A1 |
| Устройство для цифровой записи результатов каротажа | 1977 |
|
SU693286A1 |
| Устройство регистрации частотно-зависимого параметра от температуры или давления в скважине | 1989 |
|
SU1819990A1 |
| Аппаратура для каротажа в процессе бурения | 1980 |
|
SU985263A1 |
| Устройство для регистрации данных каротажа | 1983 |
|
SU1146421A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖА СКВАЖИН | 1973 |
|
SU407259A1 |
| Устройство для цифровой записи результатов каротажных измерений | 1977 |
|
SU768948A1 |
| Регистратор данных импульсного нейтронного каротажа | 1980 |
|
SU940113A1 |
| Каротажный вычислитель | 1978 |
|
SU798673A1 |
| Способ выделения коллекторов в разрезе скважин | 1983 |
|
SU1163296A1 |
Изобретение относится к промысловой геофизике. Цель - повышение качества регистрации путем исключения записи неинформативных данных, фиксируемых при перепуске каротажного кабеля. Перемещают измерительный зонд в скважине и регистрируют на носитель записи значения геофизического параметра по кадрам. Последний вклю- . чает несколько значений слов. Через кадр проходят все измеряемые значения параметра. После остановки каротажа осуществляется перепуск кабеля. Во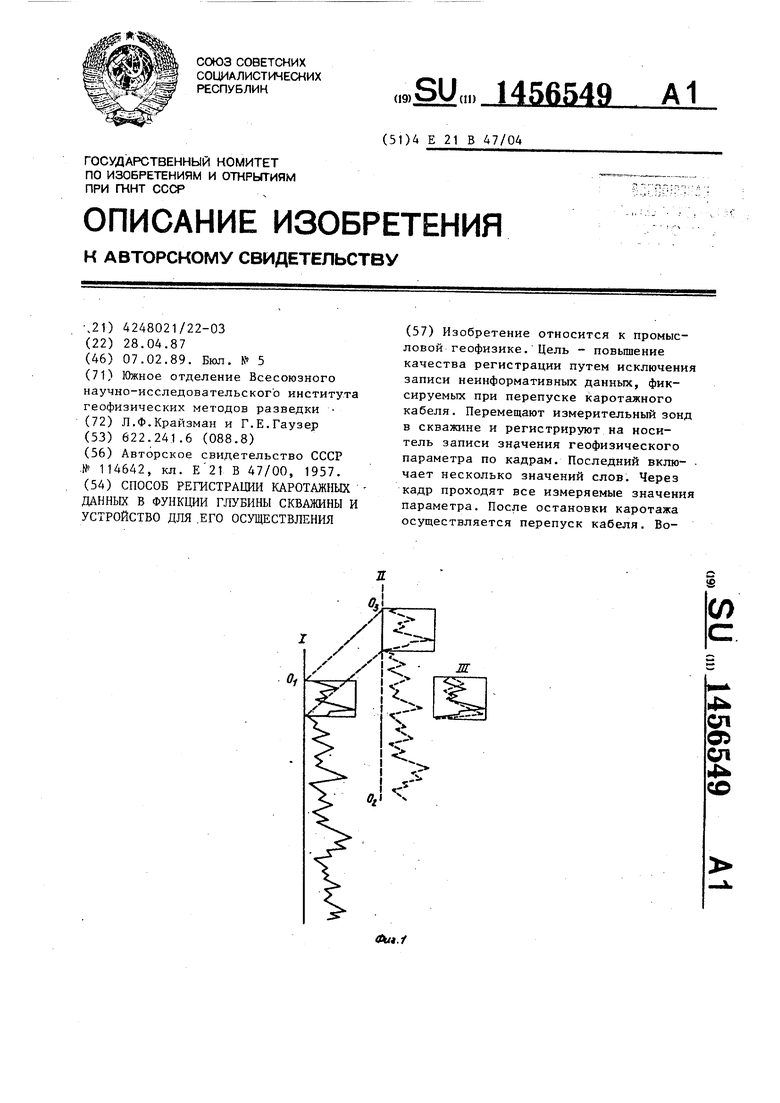
| Кипятильник непрерывного действия | 1957 |
|
SU114642A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
