Известны датчики автоматического останова круглотрикотал ной машины при обрыве, сходе и затяжке нити, установленные над бобиной для обеспечения запаса нити на инерционный выбег машины путем обрезывания нити, включаюшие поддерживаемый нитью поворотный рычаг, неподвижный нож, заводимый в рабочее положение подпружиненный нож и неподвижный контакт.
Предлагаемый датчик автоматического останова по сравнению с известными более надежен в работе и предотврапхает ложные остановы круглотрикотажной машины при ослаблении натяжений нити. Датчик имеет следуюш,ие конструктивные особенности, обеспечивающие указанные преимуш,ества.
Датчик снабжен двумя горизонтальными пластинами с противоположно направленными прорезями для заведения и удержания нити, направляюш,ей планкой с отверстием, заш,елкой в виде двуплечего поворотного рычага, одно плечо которого запирает подпружиненный нож, несуш1ий контакт, а другое плечо подпружинено регулируемой пружиной, и эксцентриком, несуш,им контакт, укрепленным на одной оси с поддерживаемым нитью рычагом, причем при сходе нити контакт аксцентрика взаимодействует с неподвижным контактом для замыкания электроцепи останова.
Поддерживаемый нитью поворотный рычаг выполнен фигурным, один свободный конец которого имеет ролик, а другой - зуб, входящиГ в отверстие направляющей планки для удержания фигурного рычага при ослаблении натяжения нити. При затяжке нити внутренняя часть эксцентрика взаимодействует с защелкой для освобождения подпружиненного ножа и обрезывания нити, причем контакт ножа взаимодействует с неподвижным контактом для останова машины.
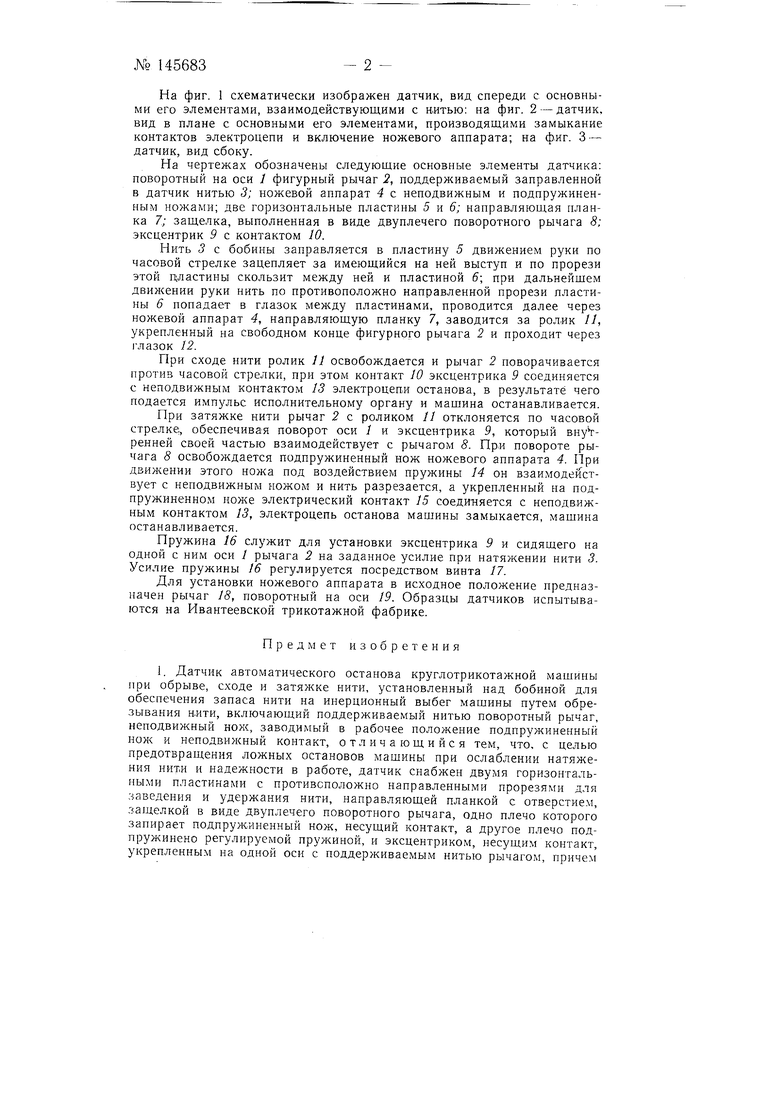
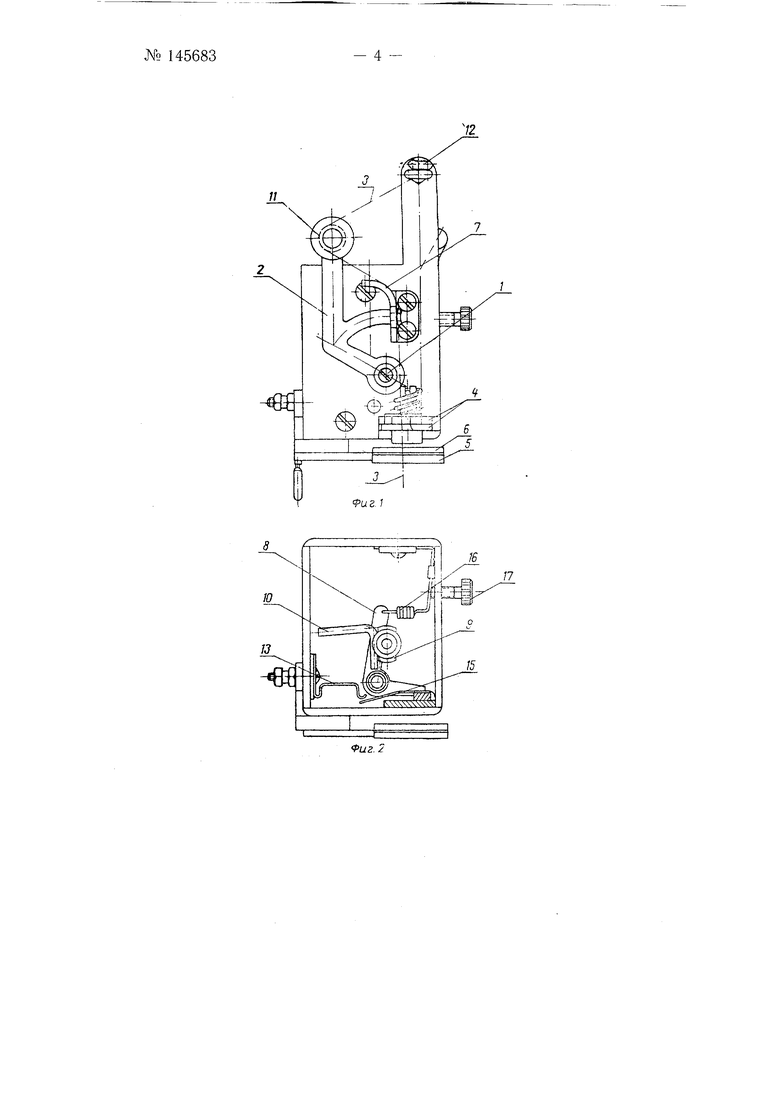
№ 145683- 2 На фиг. 1 схематически изображен датчик, вид спереди с основными его элементами, взаимодействующими с нитью: на фиг. 2- датчик, вид в плане с основными его элементами, производящими замыкание контактов электроцепи и включение ножевого аппарата; на ф.иг. 3 - датчик, вид сбоку.
На чертежах обозначены следующие основные элементы датчика: поворотный на оси / фигурный рычаг 2, поддерживаемый заправленной в датчик нитью 3; ножевой аппарат 4 с неподвижным и подпружиненным ножами; две горизонтальные пластины 5 и 6; направляющая планка 7; защелка, выполненная в виде двуплечего поворотного рычага 8; эксцентрик 9 с контактом 10.
Нить 3 с бобины заправляется в пластину 5 движением руки по часовой стрелке зацепляет за имеющийся на ней выступ и по прорези этой дластииы скользит между ней и пластиной б; при дальнейщем руки нить по противоположно направленной прорези пластины б попадает в глазок между пластинами, проводится далее через ножевой аппарат 4, направляющую планку 7, заводится за ролик 11, укрепленный на свободном конце фигурного рычага 2 и проходит через глазок 12.
При сходе нити ролик 11 освобождается и рычаг 2 поворачивается против часовой стрелки, при этом контакт 10 эксцентрика 9 соединяется с неподвижным контактом 13 электроцепи останова, в результате чего подается импульс исполнительному органу и мащина останавливается.
При затяжке нити рычаг 2 с роликом // отклоняется по часовой стрелке;, обеспечивая поворот оси 1 и эксцентрика 9, который внутренней своей частью взаимодействует с рычагом 8. При повороте рычага 8 освобождается подпружиненный нож ножевого аппарата 4. При двилсении этого ножа под воздействием пружины 14 он взаимодей ствует с неподвижным ножом и нить разрезается, а укрепленный на подпружиненном ноже электрический контакт 15 соединяется с неподвижным контактом 13, электроцепь останова мащины замыкается, мащина останавливается.
Пружина 16 служит для установки эксцентрика 9 и сидящего на одной с ним оси / рычага 2 на заданное усилие при натяжении нити 3. Усилие пружины 16 регулируется посредством винта /7.
Для установки ножевого аппарата в исходное положение предназначен рычаг J8, поворотный на оси 19. Образцы датчиков испытываются на Ивантеевской трикотажной фабрике.
Предмет изобретения
1. Датчик автоматического останова круглотрикотажной машины при обрыве, сходе и затяжке нити, установленный над бобиной для обеспечения запаса нити на инерционный выбег мащины путем обрезывания ВИТИ, включающий поддерживаемый нитью поворотный рычаг, неподвижный нож, заводимый в рабочее положение подпружиненный нол и неподвижный контакт, отличающийся тем, что, с целью предотвращения ложных остановов мащины при ослаблении натяжения нихи и надежности в работе, датчик снабжен двумя горизонтальными пластинами с противоположно направленными прорезями для заведения и удержания нити, направляющей планкой с отверстием, защелкой в виде двуплечего поворотного рычага, одно плечо которого запирает подпружиненный нож, несущий контакт, а другое плечо подпружинено регулируемой прул ;иной, и эксцентриком, несущим контакт, укрепленным на одной оси с поддерживаемым нитью рычагом, причем
при сходе кити контакт эксцентрика взаимодействует с неподвижным контактом для замыкания электроцепи останова.
2.Датчик автоматического останова по п. 1, отличающийся тем, что поддерживаемый нитью поворотный рычаг выполнен фигурным, один свободный конец которого оканчивается роликом, а другой зубом, входящим в отверстие направляющей планки для удержания фигурного рычага при ослаблении натяжения нити.
3.Датчик автоматического останова по п. 1, отличающийся тем, что при затяжке нити внутренняя часть эксцентрика взаимодействует с защелкой для освобождения подпружиненного ножа и обрезывания нити, причем контакт ножа взаимодействует с неподвижным контактом для останова машины.
- 3 -№ 145683
7/
77
/5