1
Изобретение относится к полиграфии и может использовано при изготовлении растрированных печатных форм.
Целью изобретения является повышение качества изготовления растрированных печатных форм путем использования произвольных узлов и линиатур растра.
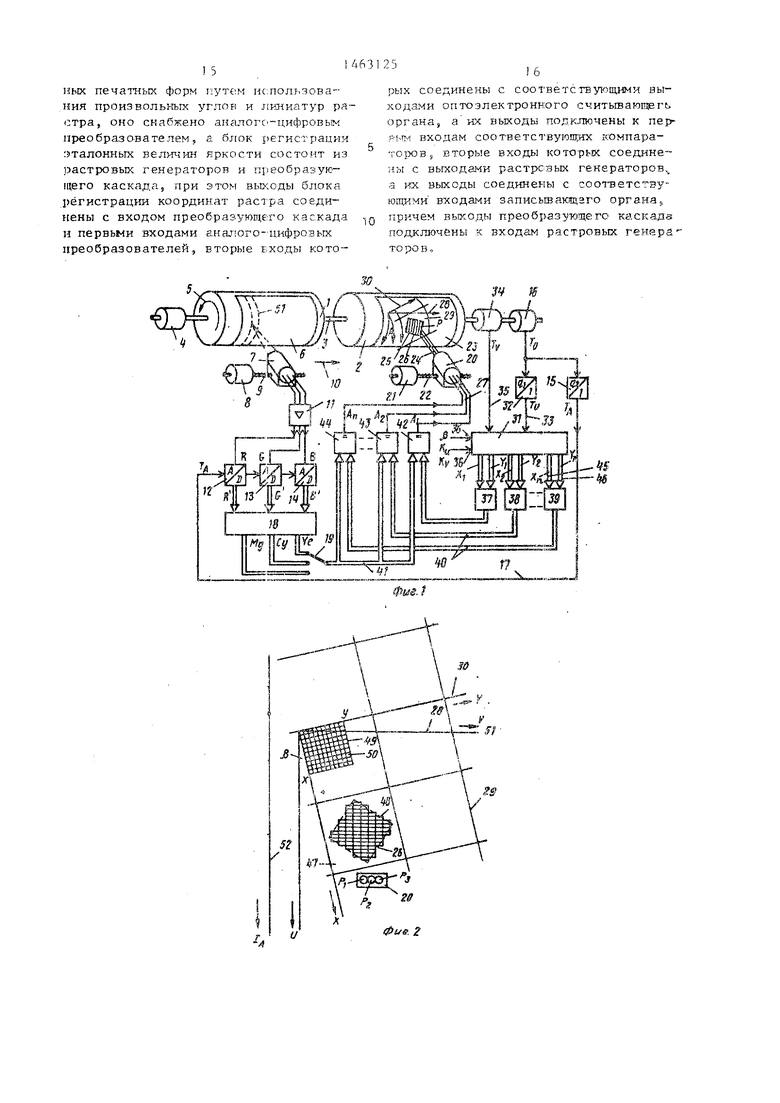
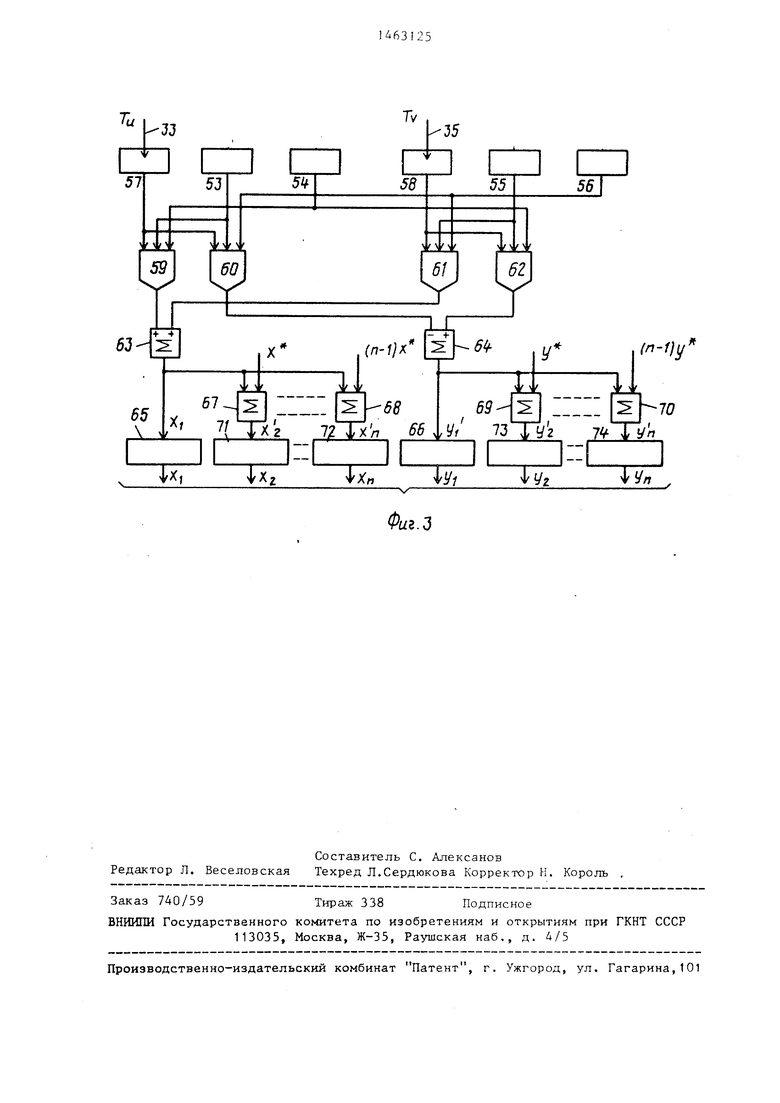
На фиг. 1 представлена блок-схема устройства для изготовления растрированных печатных форм; на фиг. 2 - деталь носителя записи; на фиг. 3 - схема преобразующего каскада.
Устройство для осуществления способа содержит носитель 1 считьшания, носитель 2 записи, вал 3, перемещаемый электродвигателем 4 (иппрапление его вращения пока:3ано на йиг. 1
стрелкой 5). На носигеле I счктыиа- ния натянут цветной оригинал 6, который развертывается по точкам и построчно с помощью озеТОБОЙ точки источника света. При непрозрачном оригинале отраженньй, а при прозрачном оригинале пропущенный смодул}фован- ный по яркости и изобрахзнием оригинала 6 развертьюающий св(гт попадает на считывающий орган 7. Орган 7 путем цветоделения с помощью цветофиль тра и электронно-оптического преобразования развертьшающего света вырабатьвает три ц)зетовьск; сиг ,нала, которые подставляют собой доли цвета развернутых растровых точек изображения. Устройство также имеет электродвигатель 8 г, шпиндель 9, перемещаемый в направлении стрелки 10, усютитель 1 , ан;шо- го-цифровые преобразователи 12 --. 14 делительный каскад 15 частоты, генератор 16 тактовых импульсов, цветовы каналы 17, схему 18 коррекции цвета, переключатель 19 сигналов, записьша- ощий оргал 20, электродв:нгатель 21, шпиндель 22. На фиг. 1 показаны носитель 23, записьюающие лучи 24,. линии 25 записи, растровая точка 26, соответствующие каналы 27, система .28 координат неповернутого растра, растровая сетка 29 и система 30 координат повернутого растра, а также преобразуюр;ий каскад 3, делительный каскад 32, информационный кана.п 33, датчик 34 импульсов, преобразующий канал 35. В устройство входят задат- чики 36 программ преобразующего каскада 31, ра-стровые генераторы 37 - 39, информационные канал:ы 40 и 41, компараторы 42 - 44, инфсзрмационные каналы 45 и 46. На фиг, 2 показаны растровая ячейка 47, участки 48 площади, растровая ячейка 49 любой ли- ниатуры растра с соогветгтвующ и1М элементом 50 записи, видеолиния 51, шкала 52 с обозначениями тактов работы устройства.
На фиг. 3 приведены регистры 53 56накопления информации, счетчики
57и 58, множительные схемы 59 - 62, сумматоры 63 и 64, регистры 65 и 66 адресов, сут маторы 67 - 70 и р&гнст- ры 71 - 74 результатов о
Блок регистрации эталонных величин яркости включает в себя зал 3,
:злек тродзигателем
Устройство, которое реализует способ изготовления растркрованных печатных форм, функционирует следутапим образом.
Аналоговые цветовые сигналы от считывающего органа 7 через последо- вательно включенньй уси;1итель 1 1 попадают на аналого-цифровые преобразователи (АЦП) 2 - 4, в которых они преобразуются в цифровые цветовые сигналы с плотностью записи, напри- мер 8 бит. При этом ка;кдому такту последовательности развартьшанил Т соответствует одна растровая точка изображения.
Последовательность такта развер- тывания Т получается за счет деления частоты в делительном каскаде 15 из последовательности т,акта Т, которая вырабатывается связанньм с вращательным движением цилиндров генерл- тором 16 тактовых импульсов. Последовательность такта развертьшания передается на АЦП 12 - 4 по каналам 1 7.
Цифровые цветовые сигналы в циф;ро- вой схеме 1 8 коррекции двета преобразуются в откорректированные сигналы для записи цветоделенных негативов: Пурпурный, Голубой и Желтый .
В цифровой схеме 18 коррекции согласно требованиям процесса репрюду- цнрования осуществляется цветоделительная и/или градационная коррект;/- ра.
Цифровые сигналы попадают на переключатель 19 сигналов, с помощью которого выбирается каждый раз один из цифровых сигналов для растриров.ан- ной записи необходимого цветоделенно- го негатива,
Записьшающи орган 20 с помощью другого электродвигате.лл 2i и шпинделя 22 движется аксиааьно в напразз- лении стрелки 10 вдоль вращающегося носителя (записывающего цилиндра) 2, Записывающий орган 20 осуществляет построчно и по точкам экспозицию растровых точек на светочувствительный носитель 23 записи, расположенный на записывающем цилиндре 2„
Сфокусированные записывающим органом 20 на носителе 23 Зсшиси записывающие лучи 24 производят экспонирование точек записи Рд, которые благодаря относительному движению между записьшающим органом 20 и записывам- щим цилиндром 2 проходяпше по периметру (в направлении записи) линии 25 записи экспонируют на носитель 23 записи.
Каждая растровая точка состоит из нескольких плотно прилегающее дру к другу линий 22 записи. Форма и размер растровой точки зависит от длины линий записи или от длительности включения отдельных записьшающих лучей. Записывающие лучи включаются и выключаются посредством записывающих сигналов А. которые подаются на за- письшающий орган 20 по каналам 27 связи,
В рамках изобретения предусматривается экспонирование линий записи растровой точки одним единственным развертываемым по направлению записи записьшающим лучом.
Получение записывающих сигналов А,.
Мгновенное местонахождение точек экспонирования Р на носителе 23 записи определяется не зависящей от растрового угла системой 28 координат U-V на записьюающем цилиндре 2, ось и которой сориентирована по перимет- ру записывающего гдалиндра ,2, а ось V - по направлению подачи развертывающего и записывающего органов. Система 28 координат U-V разделена на МНОЖЕСТВО участков площади, из которых строятся записьшаемые растровые точки.
Местоположение растровых точек 26 на носителе 23 записи задается растровой сеткой 29 на системе 30 координат X-Y, которая относительно системы координат U-V повернута на растровый угол .
Растровая сетка 29 состоит из множества растровых ячеек, размер которых зависит от записываемой линиатуры растра. Каждая растровая ячейка состоит из участков плоп5ади, которые имеют соответствующие координаты точки х ; у .
Для не зависимой от угла растра и линиатуры растра записываемой растровой ячейки и эталонной ячейки Зада- на пространственная функция R g (х; у) с ограниченным до эталонной ячейки диапазоном значений, которые определяют размеры растровых точек в зависимости от различной амплитуды
видеосигнала (тона.пьности изображения) и 6op vry- растровых точек. В этой ф нкции R - порог чувствительности растра элемента записи, а х, у - соответствующие ему координаты точки в системе 30 координат X-Y.
Диапазон значений относяпптхся к заданной функции координат точки х, 0 У ограничен по сравнению с диапазоном значений пот-челных при прохо;вде- нии всей площади записи координат точки X, у точек Р экспонирования. Представление ф},Т1-кции R § (х; у) 5 в пространстве называют также пиком растра, основная площадь которого заполняет эталонн то ячейку и в котором расположенная на высоте мгновенной амплитуды видеосигнала поперечная 0 площадь задает посредством пика растра размер растровой точки для соответствующей тональности изображения. Во время репродуцирования определяются текущие координаты точки х , 5 у точек экспонирования Р, в системе 30 координат X-Y, пересчитьшаются для ограниченного диапазона значений координат точки эталонной ячейки и определяются соответствующие значе- 0 ния яркостной характеристики та. Значение сравнивают с видеосигналом и после сравнения вьмосится ре- щение, записывать соответствующий- участок площади в системе 28 коорди- g нат U-V как часть растровой точки или нет.
Для определения координат точки и,., УП точек Р экспонирования в си стеме 28 координат U-V ось U и ось V 0 разделены на основнь е щаги /3U и uV, Дпина основньк шагов на осях может быть различной.
Координаты точки Up,, получаются как кратное от основных шагов йи 5 и V.
На первом этапе осуществления способа определяют мгновенные координаты точки Up, V точек экспонирования РП УТем текущего отсчета или сумми- 0 рования основньк шагов ли и dV посредством двух последовательностей такта Т(, и Т в преобразующем каскаде 21. Последовательность такта Т,.
и
получают путем деления частоты в де- 5 лительном каскаде 32 из последова- тельности такта Т тактового генератора 16 и вводят в преобразующий каскад 31 по каналу связи. Каждому такту TV соответствует основной шаг Ди.
7
llnvma основного шага может изменена частотой последователтзности такта 1у,
Периферийный датчик 34 импульсов, также соединенный с записываю1ци 1 цилиндром 2, вырабатывает один раз за оборот, т.е. после каждого шага подачи считывающего органа 7 и записывающего органа 20, один периферийный импульс Ту, котором, соответствует каждый основной шаг UV, Периферийные импульсы TV вводятся в преобразующий каскад 23 по каналу 35.
Координаты точки V, для пер- вой точки экспонирования Р вытекают из уравнений:
и, С -4U;
V,
С V . dV ,
где ли и ЛУ - основные шаги в системе 28 координат U-V; Су и С у- число тактов Т i-ши
Пары координат точки для других точек экспонирования можно рассчитать по паре координат точки одной из точек-экспонирования 5 например первой точки экспонирования Р, „ Поло- жение точек экспонирования относительно друг друга может быть любым, обычно точки экспонирования лежат на одной прямой.
В этом случае расстояния U и V между точками экспонирования постоянны и зависят только от конструкции записьшающего органа 20 и масштаба изображения,.Координаты точки U, V других точек экспонирования Р можно рассчитать по уравнениям:
I
Uf, и, + (n-l)ir и V, н- (n-l)V
Но часто точки экспонирования рас доложены непосредственно на образующей записьшающего цилиндра 2, и тог-t да и 0.
На втором этгше осуцествления способа в преобразующем каскаде 31 координаты точки U,, V | системы: 28 координат точки U - V с учетом угла растра fl- и различных линиатур растра постоянно преобразуются в соответствующие координаты точки системы 30 координат X-Y.
Во время преобразования наибольший диапазон значений, встречающихся при экспонировании всей площгзди носи
8
теля записи 23, огрянкчивается пС ди- диапазону значений зад.анной функ1;ии R g Сх, у).
Пересчет координат точки в преоб- разующбУч каскаде 3 вьтолняют по уравнениям:
X К, и cos/ -I- K.-V sin/i ; у sin /; К ,,-V cos р
(2)
.g
5
0
5
0
-55 0
g
g g
В уравнениях (2) коэффициенты К у и К учитывают различные линиатуръ растра записываемой растровой яч€:йкк и эталонной ячейки.
Угол 1 растра и козфсЬициенты предварительно устанавливаются нг. входах преобразуют.егс каскада 3.
Преобразующий каскад 31 вьшод1-;т на своих выходах ;№Я каждой гоч- ки экспонирования Р соответствук Цие пары координат к,, у,.
Растровые генераторы 37, 38 и 39 вырабатьшают из предложенных коорди- натньпх пар х, у по заданной фзгнк°- ции R g (х; у) соответствующие ровые значения порога чувствительности растра R, которые, как и циф ро- вые спектрально-фильтровальные скгна- ль, имеют плотность записи 8 бит.
Для сравнения значений порога чувствительности растра с выбранным на переключателе 19 сигналов предусмотрены цифровые компаратбры 2 43 и 44 вьфабатьшающие записывгиош е сигналы АП, с помощью которых управляют экспозицией растровьк точек 26 на носитель 23 записи.
Растровые генераторы могут быть выполнены, например, из накопителя постоянных величин, Е котором запоминается та же функция R g (х; у).
Накопитель постоянньк величин стоит из матриц, например5 с 32x32 ячейками памяти для значений порога чувствительности растра. Ячейки памяти могут набираться: 32 гщресами X и 32 ад,ресами Y.
Можно было бы также адресовать все накопители постоянных величин значениями координат точки x j у одной из точек экспонирования. Различные значения порога чувствительности растра для других точек экспонирования получают следзтощим образок: при программировании отдельньк накопителей постоянных величин учитьшают соответствующие преобразованные в систему 30 координат X-Y расстояния U и V других точек экспонирования.
Для экономии накопителей постоянных величин можно различные пары координат X, у для точек экспонирова- ния адресовать последовательно одному единственному накопителю постоянных величин мультиплексным методом.
Растровые генераторы 37, 38 и 39 могут состоять из функциональных преобразователей, которые моделируют функцию R g (х, у).
В устройстве согласно фиг. 1 движение подачи считывающего органа 7 и записывающего органа 20 может быть периодическим или непрерьгоным.
При периодической подаче развертывание и запись осуществляются вокруг цилиндров на круговые линии изображения, расстояние между которыми соответствует шагу подачи. При непрерывной подаче развертьшание и запись осуществляются по идущим по спирали вокруг цилиндров.линиям изо- бражения. В этом случае при записи получаются небольпше погрешности, которые можно компенсировать корректи- руюпдими факторами S sin/} или S х X cos /3 в уравнениях (2) преобразова ния, причем Sy означает шаг спиральной линии, а (ь угол растра,. Преобразующие уравнения имеют следующий вид:
х KIJ-U COS/3 + Ку V-sin/i ; у KL.-U sin f + KV-V cosA (3)
где и, V - значения координат эле- ментов записи в системе координат неповернутого растра записи; р, - заданный угол поворота
растра;
х , у - значения координат элементов записи в системе координат растра печати;
К, К - масштабные коэффициенты.
X X .nod
у Y -mod NO,.
X, у - значения координат эта- ее лонных элементов в пределах эталонной ячейки; М, ,и - количество эталонньк элементов в обоих на
ю
д
2025 - ЗО
ТС
40
g
50
ее 1 О
правлениях эталонной ячейки.
Для лучшего понимания записи растровых точек на фиг. 2 представлена увеличенная деталь носителя 23 записи с соотнесенной к устройству системой 28 координат U-V (направление и направление записи) и с записываемой повернутой растровор сеткой 29, на которую сориентирована система 30 координат X-Y, причем системы координат включают растровый угол /.
Растровая ячейка 47 повернутой растровой сетки 29 с растровой точкой 26 представляет своего рода основную структуру растрового рисунка, который периодически продвигается вперед в направлении X и Y по всей площади записи.
Растровая точка 26 состоит из нескольких смежных идуп;их в направлении записи линий 25 записи. Каждая линия 25 записи состоит из отдельных элементов записи 48, которым соответствуют порядковые координаты точки и, V или х , у .
Кроме того, обозначена эталонная ямейка 49 любой линиатуры растра, которая также составляется из нескольких элементов 50 записи. Каждому элементу 50 записи соответствует значение порога чувствительности растра R и координатная пара xj у, диапазон значений которых однако ограничен эталонной ячейкой 49.
Во время записи для каждого элемента 48 записи, по которому мгновен- но проходит точка экспонирования, вычисляют относящееся к конгруэнтному участку 50 площади в эталонной ячейке 49 значение яркостнрй характеристики элемента и сравнивают с видеосигналом, чтобы получить записываь щие сигналы.
Получение видеосигналов. В примере вы1ш:шения согласно фиг. I записывающий орган 23 воспроизводит, например три записьшающих луча 24 и тем самым также несколько смежных точек Р экспонирования, которые за один оборот записывающего цилиндра 2 экспонируют соответствующее количество линий 25 зап иси.
Если имеются три точки экспонирования от Р, от PJ, как это представлено на фиг. 2, а растровая точка 26 состоит из линий записи 25, то растровая точка 26 будет зкспонирована после двух оборотом цилиндра или шагов подачи -считывашцего органа 7 и записьгоающего органа 20, В этом cjrynae для всех линш1 25 записи растровой точки 26 имеются только две развернутые смежными виде.олиниям 51 информации иэобра; ения оригинала 6, Точность записи можно увеличить., если для каждой линии 25 записи имеется информация, содержащаяся в изображении, полученная от соо -кесенной с местоположением видеолинии.
Это может быть дстстигнуто в тем случае, , когда на оригиншю. 6 множество смежных расположенных по направлению V системы 28 координат U-V точек изображения разверты аются одло- временно и каждьй раз для управления записывающим устройством выбирается видеосигнал той точки изображения, местоположение которой на оригинале 6 совпадает с записываемой в данный момент линией 25 записи,
Записьюающий орган 20 может вырабатывать тол|)Ко один згшисьшающий луч 24 и, соответственно, одновременно только одну точку Р, экспонирования на носителе 23 записи, В этом случае экспонируется, соответственнс одна ЛШ1ИЯ 25 записи за один оборот записывающего цилиндра 2, причем считывающий орган 7 и записьшающий Орган 20 после каждого оборота выполняют один шаг подачи на гшрину линии записи, позтому для каждой линии 25 записи растровой точки 26 получают информацию изобраисения от привязанной к местоположению в направлении V линии 31 ийображен1-ш оркгинатга 6, Этот способ очень точен, однако очен медленен.
Расстояния между точками изображения на линии 51 изобрахсения выбирают, например, т 1кими, чтобы в направлении и на ка:«(дую растровую точку 26 развертьшалась одна точка.изображения. Поскольку калдому такту последовательности такта развертывания Т, соответствует точка изображения расстояние меязду ними может регулироваться изменением частоты последовательности такта развертьюа- ния Т.
На фиг. 3 показан пример вьтюлне- ния преобразующего каскада 31, в кс- тором порядковые координаты точки U, V системы 28 координат U-V определяю отсчетом основных шаг ов dU и uV и
1463)25
2
5
0
5
0
5
0
5
5
пересчитынают по уравнению (2) в ко- ординат). X.,, у для управления растровыми генераторами 37, 38 и 39.
Величины и Ky J,, а также cos /3 и sin/3 накаплива отся в регист- оах 53 и 56,
Такты Ту и TV отсчитываются в счетчиках 57 и 58. Показания счетчиков соответствуют факторам Су и С,. Согла-Сг Ъ уравнениям (2) факторы умножаются в множительных схемах 59- 62, и произведения затем cyi iMHpyTOT- ся -в сумматорах 63 и 6А, Результатом являются порядковые координаты для первой точки Р экспонирования как информация в 32 бит.
Поскольку 32 адреса X и 32 адреса Y накопителя постоянных величин могут набираться в растровьгх генераторах 37, 38 и 39, соответственно, информацией в 5 бит, вычисленные Kooip- динаты точки (32 бит) пересчитьгоают- ся на ограниченный диапазон адресов х, у от 0-31 (5 бит) по отношению X, х, mod 32 или у , - у mod 32 в регистрам: 65 и 66. Пересчет осуществляется путем сброса более высоких бит,
Выходные сигналы каскадов регистров 65 и 66 - адресная пара для точки Р экспонирования накопителя постоянных величин.
Другие пары адресов х, у для других точек экспонирования Р находят суммированием велич1-ш (n-i)x и (п-Оу с рассчетными координатами точки х и у в су1 гматорах 67-70 путем сброса ит в регис гг ах 71-74, Значения хну вычисляют по заданнь м расстояниям U и V ме;кду точками экспонир(5вания Р,,
Раз меется, адресные пары х, у для других точек экспонирования Р,, можно также найти путем cyмl {иpoвa- ния вел№1ин (n-OU и )У с ко- ордината1чи точки U и V, первой точки экспонирования Р, и коследующегс iipe образования.
Получение растра можно еще улучшить, если накапливать больше чем 32x32 значений порога чувствительности растра в накопителях, постоянных величин растровых генераторов 37, 38 и 39, Улучшение предпочтительньн : образом достигается без соответствующего увеличения емкости 3 У, если преобразованные координаты точки одной из точек экспон1фования до опро13
са накопителей постоянных величин накладывать вспомогательные величины, значения которых определяются квазн-случайно и которые меньше величин координат точки.
Использование изобретения повьша ет качество изготовления растриро- ванных печатных форм.
Формула изобретени
1 Способ изготовления растриро- ванных печатных форм, заключающийся в формировании расположенных в растровых ячейках растра печати растровых точек на печатной из расположенных в растре записи элементо с помощью записывающего органа, поточечном и построчном считывании оригинала, измерении величин яркост считанных точек изображения оригинала, поточечном и построчном относительном перемещении записывающего органа относительно элем.ентов записи, определении соответствующего положения записывающего органа в системе координат неповернутого растра записи, определении эталонных величин яркости отдельных элементов записи, соответствующих положению записывающего органа, сравнении эталонных величин яркости отдельных элементов записи с величинами яркости соответствующих точек изображения оригинала и регистрации элементов записи, отличающийся тем, что, с целью повышения качества изготовления растрированных печатных форм путем использования произвольных углов и линиатур растра, по окончании определения положения записывающего органа и соответствующего элемента записи в системе координат неповернутого растра записи устанавливают положение элемента записи в системе координат растра печати, повернутого относительно неповернутого растра записи на заданный угол растра, затем определяют его положение внутри соответствующей растровой ячейки растра печати и производят определение эталонных величин яркости отдельных элементов запис и, определяют эталонный элемент эталонной ячейки, положение которого внутри эталонной ячейки устанавливают соответствующим положению элемента записи внутри растровой ячейки растра печати, затем
U
фиксир тот эта- );онную величину яркости и сопоставляют ее с соответствующим эталонным элементом.
2. Способ по. п. I, отличающийся тем, что значения координат элементов записи математически определяют в системе координат растра печати, повернутой на заданньп угол растра относительно системы ко Ординат неповернутого растра записи, в соответствии с системой уравнений
15
х K,j U cos/3 + К,. V-sin/i ,
у KL, Usin/i +Ky V-cos/5
где и, V - значения координат элементов записи в системе 20координат неповернутого
растра записи; р, - заданный угол поворота
растра;
х , у - значения координат эле- 25ментов записи в системе
координат растра печати Kj,, К - масштабные коэффициенты и затем математически определяют координаты эталонных элементов внутри 30 эталонной ячейки, положение которых соответствует установленному положению элементов записи внутри растра печати, в соответствии с систет юй уравнений
35
X х mod-Mp.y у mod Np
где X, у - значения координат эталонных элементов в преде- лах эталонной ячейки;
MO NO количество эталонных элементов в обоих направлениях эталонной ячейки. 3. Устройство для изготовления ра- стрированных печатных форм, содержащее оптически соединенный с носителем считывания опто электронный считывающий орган, оптически соединенный с носителем записи, записывающий ор- ган, кинематически соединенный с носителем считьшания и носителем записи, блок регистрации координат pacTi pa, блок регистрации эталонных вели- чин яркости и блок перемеще ния носи- телей считывания и записи, кинематически связанный с носителями считьшания и записи, и компараторы, о т - ичающе еся тем, что, с цеью повьш:ения качества растрированных печатньк форм путем ис;полр.зова-- 1ШЯ произвольных углов и линиатур растра, оно снабжено аналогс -цифровым преобразавателем5 а блок регистрация эталонных величин яркости состоит из растровых генераторов и преобразук- щего каскадаS при 3TONr вькоды блока регистрации координат растра соединены с входом преобразующего каскада и первьми входами анаг; его-цифровых преобразователей, вторые входы кото
pbix соединены с соответствук1 дими выходами оптоэлектронного считьшаюп5вгс органа, а УК выходы подк.пючены к пер- яьк-1 входам соответствующих компара- тошв;, вторые входы которых соединены с вьгхода чи растрс:зьк генераторов а их выходы соединены с соо7эетству- ющими входа1чи записьшающаго органаj причем выходы гфеобразующего каскада подключены к входам растровых генера торов.

Изобретение относится к полиграфии и может быть использовано при изготовлении растрированных печатных форм. Оно позволяет повысить качество изготовления растрированных печатных форм путем использования произвольных углов и линиатур растра. Носителю записи соответств ют расположенная в направлении строк одна система координат и повернутая на угол растра другая система координат, раз,елейные на участки площади, из которых составляются записываемою растровые точки. Независимо от угла растра участкам площади ограниченной области растра, соответствующей ми одной растровой ячейке, в зависимости от их новых коордШтат соответствуют определенные значения порога чувствительностиt Во время записи координаты точки начальной системы координат участков , по которым мгновенно прошел записьшающий орган, фиксируются на носителе записи, с учетом угла растра пересчитываются в соответствут-эпще координаты точки новой системы координат ограниченной области растра и определяются соответствующие найденным координатам точки новой системы координат значения порога чувствительности растра. Значения порога чувствительности растра постоянно сравнивают с соответствующим видеосигналом, причем вырабатывается сигнал управления для запнсываюпдего органа, который определяет будет ли соответствующий участок площади записан как часть растровой точки или нет. 2 с. и 1 3.п. ф-лы, 3 ил. g asBsaa
Н f6
фиё. 2
TU
TV
35
Фиг.З
| ШТАБЕЛИРУЕМЫЙ КОНТЕЙНЕР НА КОЛЕСАХ С ВЫДВИЖНЫМИ ПОЛКАМИ | 2010 |
|
RU2500564C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
