1
Изобретение относится к технике измерений и может использоваться для контроля структуры поверхностей.
Цель изобретения - увеличение tepMo- и вчбростабильности и расширение технологических возможностей.
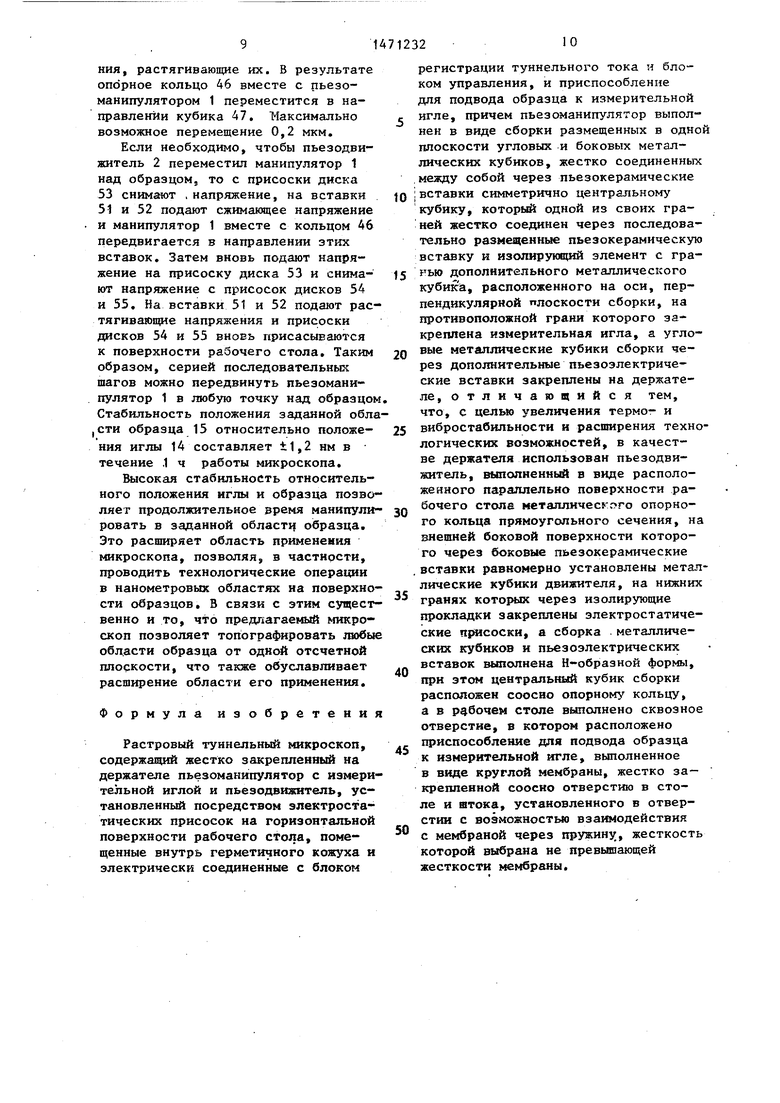
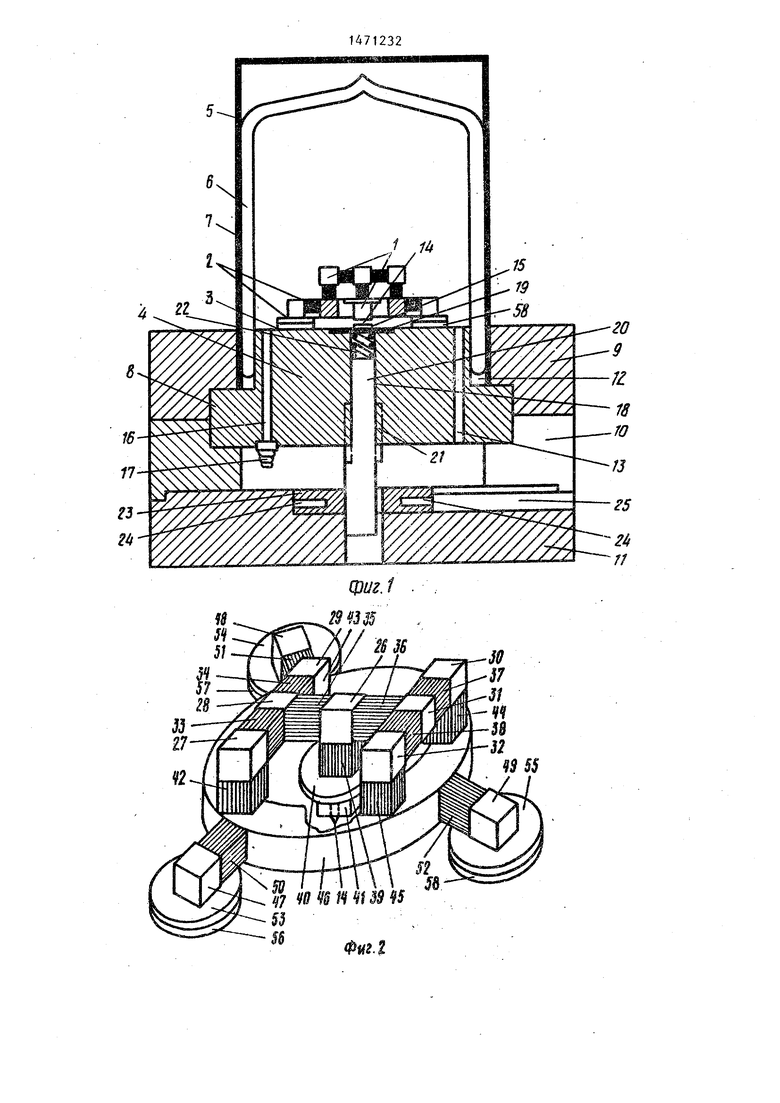
На фиг,1 изображена конструкция растрового туннельного м,чкроскопа; на фиг.2 - пьезоманипулятор с пьезо- движителем; на (1иг.З - функциональная схема блоков управления.
Микроскоп содержит пьезоманипулятор 1, закрепленный на пьезодвижителе 2. Поверхность 3 рабочего стола 4 с расположенными на ней пьезо- манипулятором 1 и пьезодвижителем 2 установлена внутрь защитного кожу ха 5 цилиндрической формы диаметром 110 мм и высотой 270 мм, состоящего , из стеклянного сосуда Дьюара 6, - вставленного с упорами в пластмас- 1совый кожух 7 и предохраняющего со- суд Дьюара от повреждений. Рабочий стол 4 представляет собой составную цилиндрическую деталь общей высотой 107 мм из нержавеющей стали, верхняя часть его имеет диаметр 80 мм и высоту .45 мм, и входит в сосуд Дьюара на-глубину до 30 мм. Нижняя часть 8 рабочего стола диаметром 118 мм и высотой 62 мм является основанием и закрепляется в кожухах 9-11. Кожухи 9 и Ю выполнены из пенополиуретана, кожух 11 - из фторопласта. Сосуд Дьюара 6 с помощью кожуха 7, имеющего резьбу в нижней ч&стк навинчивается до упора череэ проклад- ку 12 из фторопласта до нижней части 8. Кожухи 9-11 цилиндрической формы имеют внешний диаметр 200 мм. Во внутреннее отверстие кожуха 9 диаметром 114 мм вклеен пластмассо- вый стакан с,внутренним резьбовым отверстием для кожуха 7 и полым дном диаметром 80 мм. Кожух 9 со стаканом приклеены к верхней плоскости выступа 8. Рабочий стол 4 с кожухом 9 свободно устанавливается в кожухе 10, который -В свою очередь свободно вставляется в кожух 11. Сосуд Дьюара 6 в кожухе 7 и кожухи 9-11 служат для акусто и термоизоляции рабочей области мискроскопа от внешней среды, В рабочем столе выполнены Два вертикальных сквозных отверстия 13 диаметром 4 мм для прокладки электрических цепей от блоков управления к регистрации к пьезоманипулятору 1, пьезодвижителю 2, игле 14 и образцу 15. Два выполненных в рабочем столе 4 сквозных вертикальньск отверстия 16 диаметром 4 мм с закреплен- ными в их нижней части штуцерами 17 служат дпя запуска в объе М микроскопа под сосудом Дьюара 6 газовых сред заданного состава при атмосферном давлении дпя проведения техноло- гических операций с помощью иглы 14 на поверхности,образца 15, а также могут быть использованы для созда
ния форвакуумных условий работы мик- кроскопа
В центре рабочего стола 4 вьшоЛне но сквозное цилиндрическое отверстие 18 диаме;гром 10 мм. В верхней части этого отверстия расположена мембрана 19, выполненная в виде плоского диска толщиной 0,5 мм и диаметром 20 мм из листовой закаленной стали. Мембрана 19 установлена в соответствующей проточке в рабочем столе,, выполненной по его ц ентру (фиг.1) и приварена по ее периметру. Плоские исследуемые образцы 15 толщиной 0,5 мм приклеивают электропроводя- njifm клеем к мембране 19 в ее центре сверху, В отверстии 18 установлен цилиндрический шток 20, выполненый из нержавеющей стали,длиной 145 мм и диаметром 9,9 мм в верхней части, соединенный с рабочим столом резьбовым соединением 21 высотой 30 мм от основания рабоче1 о стола. Нижняя часть штока после резьбы 21 имеет диаметр 12 мм и продольный шлиц на глубину 2 ммо Между штоком 20 и нижней поверхностью мембраны установлена пружина 22, выполненная из закаленной стали, жесткость которой меньше соответствующей жесткости мембраны, и служит для ослабления вертикального перемещения .мембраны за счет штока 20,
Пружина подобрана так, что при одном полном обороте штока она смещается за счет резьбового соединения на 1 мм вертикально, в то время как мембрана 19 и вместе с ней образец 13 на 3 мкм. При этом средняя скорость грубой подачи образца составляет 10-20 нм/с. Пружина 22 с малой жесткостью в то же время демпфирую ет вертикальные перемещения штока относительно рабочего стола, вызван ные изменением его температуры.
На штоке 20 в нижней его части свободно одет диск 23, вьшолненный из латуни толщиной 10 i, внешним диаметром 80 мм и внутренним диаметром 12,2 мм с радиальными отверстиями 24, выполненными .на торцах диска диаметром 4 мм, длиной 20 мм. Одно из отверстий сделано сквозным, 33 него ввинчивается латунная шпилька на резьбе до упора с поверхность 1плица на штоке 20. С помощью диска 23 и шпильки передается вращательное движение на шток при повороте
диска 23, Четыре радиальных промежутка 25 между четьфьмя выступающими пазами в кожухе 11 служат для поворота диска 23 с помощью отвертки (не показана), вставляемой в отверстия 24 о
Пьезоманипулятор 1 состоит из семи кубиков 26-32, расположенных в одной плоскости и соединенных соос- ио своими гранями с помощью пьезоэлектрических вставок 33-38.так, что в плане образуется буква Н, К центральному кубику 26 с помощью вставки 39 в плоскости, перпендикулярной плоскости манипулятора, через электроизолирующий элемент 40 закреплен соосно кубик 41 с иглой 14 в его центре, ось которой перпендикулярна 1ШОСКОСТИ манипулятора и проходит через центр кубика 26, Измерительная игла 14 из .-вольфрама диаметром 1 мм закрепляется в кубике 41 с помощью винта (не показан) , Пьезоманипулятор 1 крепится с помощью пьезокерамических вставок 42-45 к поверхности опорного кольца 46 пьезодвижителя 2, Опорное кольцо 46 выполнено из нержавеющей стали с . сечением 6x6 мм и с внешни диаметром 42,5 мм, к которому на внешней боковой поверхности в радиаль ном направлении на одинаковом расстоянии друг от друга жестко закреплены своей гранью металлические кубики 47-49 посредством соосных им пьезокерамических вставок 50-52, прчем на нижних гранях кубиков соосно им закреплены электростатические присоски 53-55, а верхние грани кубиков и вставок расположены в одной плоскости с верхней поверхностью опорного кольца. Электростатические присоски 53-55 представляют собой диски из пьезокерамики ЦТС-19 диаметром 15 мм, толщиной 1 мм, на верхнюю горизонтальную поверхность которых нанесены электроды из серебра. Нижние стороны дисков отполированы в одной горизонтальной плоскости с R. 0,05-0,1 мкм. Вставка 39 и 41 соединены жестко через диск 40 аналогичное размеров к из того же материала, у которого имеются серебряные электроды в центре с обеих сторон i соответственно с размерами 5x5 и 6x6 км.
Все ку5ики изготовлены из нержа веющей стали с размерами Ьхбхб мм.
полированными с R 3-6 мкм. Все керамические вставки выполнены из керамики ЦТС-19 толщиной 6 мм с на- г несенными с обеих сторон серебряными электродами. Вставки имеют размеры 5x5x6 мм, на сторонах с размерами 5x5 мм находятся серебряные электроды. Бее кубики 26-32, 41,
0 ;47-49, вставки 33-39, 42-45, 50-52 .сторонами с электродами между собой и вставки 50-52, присоединенные к опорному кольцу, припаяны мягким припоем с температурой плавления
5 ISO С. Все кубики и вставки скреплены между собой соосно,
Пьезодвижитель 2 установлен на поверхности 3 рабочего стола 4 с помощью присосок 53-55 соответственно
0 на встречных дисках 56-58, которые нижней стороной приклеены эпоксидной смолой к поверхности рабочего стола 3 так, что если пьеэодвижи- тель своими присосками соосно сто5 ит на встречных дисках, то игла 14 находится напротив центра мембраны 19, Размеры и материал дисков аналогичен дискам присосок 53-55,Верхние стороны дисков отполированы
0 в одной горизонтальной плоскости с R 0,05-0,1 мкм. Пьезсг--ижитель установлен на них в нерабочем состоянии за счет своего веса и за счет трения палированиых поверхностей соответственно пар дисков 53, 56;,54, 57; 55, 58, Диски 56-58 служат для исходного позиционирования пьезодвижителя и стабилизации работы присосок.
л Блок регистрации (фиг.З) включается в электрическую цепь, состоящую из иглы 14 и образца 15, В блоке 59 регистрации сигнал туннельного тока снимается с 1 МОм резистора 60, параллельно которому включен небольшой конденсатор 61 для фкпьтра- ции ВЧ-шумов, Далее сигнал через усилитель 62 подается на вход дифференциального усилителя 63, где сравнивается с заданным опорным напряжением Ug, Выбором этого напряжения осуществляется задание туннельного тока. Затем сигнал поступает на фильтр 64 с пропорциональным интегрированием, далее на силитель 65 с регулируемым усилением,подается на г-координату самописца или запоминающего осциллографа 66 и в блок 67 управления на высоковольтный уси5
0
итель z привода 68 и аналого-цифроой преобразователь 69. В блоке 59 егистрации использованы в качестве элементов 62-65 микросхемы 544УД1, 140УД6 и транзисторы КТ940.
Блок 67 управления состоит из стандартных приборов и устройств, СЛ1ГЖИТ для управления иглой 14 по оординатам х, у, z для установления есткой связи между пьезодвижителем 2 и рабочим столом 4 и для перемещеия пьезодвижителя вдоль рабочего тола 4, С помощью компаратора 70 ерез цифроаналоговые преобразоватеи 71 сигналы управления подаются на высоковольтные усилители 74-76 дпя управления плечами пьезодвижителя 2 и на высоковольтные усилители 77-79 для управления присосками дисков 53-55, Управление пьезодвижителем 2 и х,у-приводами осзпцест- вляется компаратором по специальным программам. Управление z-при- водом осуществляется в автоматическом или ручном режиме. Точки подт ключения блоков показаны на фиг.З, стрелками с указанием номера элемента, к которому подсоединяется данный вывод.
1,
Микроскоп работает следующим образом.
В начале приклеивают электропроводящим клеем образец 15 к йембране 19 в ее центре. Далее иглу 14 в держателе кубика 41 устанавливают так, чтобы зазор между ее острием и поверхностью образца составлял 0,01 мм при установке пьезодвижителя своими присосками дисков 53-55 на диски 56-58 рабочего стола. Величина зазора контролируется оптическим микроскопом. После этого с помощью блока управления подается постоянное напряжение 600 В на пары контактов дисков 53, 56; 55, 58;. 54, 57, Пьезо движитель жестко связывается с рабочим столом 4 за счет электростатического эффекта притяжения с силой до 6 Н, После этого плотно свинчившот сосуд Дьюара 6 в кожухе 7 с кожухом 9. Далее включается блок регистрации и следующие цепи блока 67 управления: на z-привод, контакты 26 и 40 подают напряжение, растягивающее вставку 39 (фиг,2) 350 Bj на приводы X и у (фиг,3) подают постоянное напряжение 200 В. Через
1-1,5 ч работы микроскопа с помощью отвертки медленным и плавным поворотом диска 23 осуществляется грубое
5 приближение образца 15 к острию
иглы 14 и контроль зазора осуществляется по наличию и в еличине туннельного тока. На. этом этапе скорость приближения образца к игле составля0 ет -vIO нм/с. При такой скорости подачи образца можно вовремя остановить подачу и автоматика уверенно захватит нужную величину туннельного тока,При этом г-привод (вставка 39)
5 пьеэоманипулятора 1 работает с помощью блоков -регистрации и управления в режиме отрицательной обратной связи. При увеличении туннельного тока в цепи иглы 14 уменьшается на20 пряжение на вставке 39 и увеличивается зазор между остряем иглы и поверхностью .образца до тех пор, пока не установится заданная величина туннельного тока. Если вставка 39
25 работает в режиме растяжения, то ее ч увствительность составляет 0,42 HM/BS в режиме сжатия - 0,38 нм/В, Два уровня чувствительности по вертикальной оси связаны с гистерезисом
IQ вставки 39fr.
Чувствительность смещения пьезо- привода иглы вдоль поверхности образца по осям X, у составляет 0,4 нм/В, На все вставки могут подаваться напряжения до 1000 В, раз меры растра при прочих неизменных условиях могут составлять 0,4 к 0,4 мкм.
Для записи одной строки растра,
40 например, вдоль оси х на вставки 35 и 36 через кубики 26, 28 и 31 от блока 67 управления подается напряжение, изменякнцееся линейно от нуля до некоторого значения, при 45 этом игла 14 смещается вдоль оси системы, проходящей через .кубики 28 и 31, Дпя записи следующей строки растра иглу необходмо сместить вдоль поверхности ортогонально стро- CQ ке. Для этого подают одинаковые постоянные напряжения между вставками 33, 34 и 38, 37,
При необходимости расширить поле растра на одну из вставок, например 50, подают напряжение сжатия от бло- ka 67 управления на кубик 47, колы цо 46 и одновременно на вставки 51 и 52 через соответственно кубики 48 и 49, а на кольцо 46 - напряжения, растягивающие их. В результате опорное кольцо 46 вместе с пьезо- манипулятором 1 переместится в направлении кубика 47, Максимально возможное перемещение 0,2 мкм.
Если необходимо, чтобы пьезодви- житель 2 переместил манипулятор 1 над образцом, то с присоски диска 53 снимают , напряжение, на вставки 51 и 52 подают сжимающее напряжение и манипулятор 1 вместе с кольцом 46 передвигается в направлении этих вставок. Затем вновь подают напряжение на присоску диска 53 и снимают напряжение с присосок дисков 54 и 55, На вставки 51 и 52 подают растягивающие напряжения и дисков 54 и 55 вновь присасываются к поверхности рабочего стола. Таким образом, серией последовательных шагов можно передвинуть пьеэомани- пулятор 1 в любую точку над образцом Стабильность положения заданной обла ,сти образца 15 относительно положения иглы 14 составляет t1,2 им в течение .1 ч работы микроскопа.
Высокая стабильность относительного положения иглы и образца позволяет продолжительное время манипулировать в заданной областц образца. Это расширяет область применения микроскопа, позволяя, в частности, проводить технологические операции в нанометровых областях на поверхности образцов, В связи с этим существенно и то, что предлагаемый микроскоп позволяет топографировать твобые области образца от однЫ1 отсчетной ппоскости, что также обуславливает расширение области его применения.
Формула изобретения
Растровый туннельный микроскоп, содержащий жестко закрепленный на держателе пьезоманипулятор с измерительной иглой и пьезодвижнтель, установленный посредством электростатических присосок на горизонтальной поверхности рабочего стола, помещенные внутрь герметичного кожуха и электрически соединенные с блоком
0
5
0
5
0
5
0
5
0
регистрации туннельного тока и блоком управления, и приспособление для подвода образца к измерительной игле, причем пьезоманипулятор выполнен в виде сборки размещенных в одной ппоскости угловых и боковых металлических кубиков, жестко соединенных между собой через пьезокерамические вставки симметрично центральному кубику, который одной из своих гра- ней жестко соединен через последовательно размещенные пьезокерамическую вставку и изолирующий элемент с гранью дополнительного металлического кубик а, расположенного на оси, перпендикулярной плоскости сборки, на противоположной грани которого закреплена измерительная игла, а угловые металлические кубики сборки через дополнительные пьезоэлектрические вставки закреплены на держателе, отличающийся тем, что, с целью увеличения термо- и вибростабильности и расширения технологических возможностей, в качестве держателя использован пьезодви- житель, выполненнь( в виде расположенного параллельно поверхности рабочего стола металлического опорного кольца прямоугольного сечения, на внешней боковой поверхности которого через боковые пьезокерамические вставки равномерно установлены металлические кубики движителя, на нижних г{}анях которых через изолирующие прокладки закреплены электростатические присоски, а сборка металлических кубиков и пьезоэлектрических вставок выполнена Н-образной формы, при этом центральный кубик сборки расположен соосно опорному кольцу, а в рабочем стола выполнено сквозное отверстие, в котором расположено приспособление для подвода образца к измерительной игле, выполненное в виде круглой мембраны, жестко закрепленной соосно отверстию в столе и штока, установленного в отверстии с возможностью взаимодействия с мембраной через пружину, жесткость которой выбрана не превышающей жесткости мембраны.
U71232 53 565tf 57
г7,29,30,32
55 SS


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ ПРОВОДЯЩИХ ОБРАЗЦОВ | 1994 |
|
RU2077091C1 |
| Сканирующий туннельный микроскоп | 1990 |
|
SU1797149A1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 1991 |
|
RU2018188C1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП И ГОЛОВКА ДЛЯ НЕГО (ВАРИАНТЫ) | 1994 |
|
RU2069056C1 |
| Сканирующий туннельный микроскоп | 1989 |
|
SU1698914A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| Сканирующий туннельный микроскоп | 1987 |
|
SU1453475A1 |
| Сканирующий туннельный микроскоп | 1988 |
|
SU1564702A1 |
| СПОСОБ ОЦЕНКИ ГОДНОСТИ ПРОВОДЯЩЕЙ ПЛЕНКИ | 1993 |
|
RU2072586C1 |
| Сканирующий туннельный микроскоп | 1988 |
|
SU1531181A1 |
Изобретение относится к технике измерений и может использоваться для контроля структуры поверхностей. Цель изобретения - увеличение термо- и вибростабильности и расширение технологических возможностей - достигается выполнением держателя измерительной иглы в виде металлического опорного кольца. Металлическое опорное кольцо через равномерно закрепленные на боковой поверхности пьезокерамические вставки соединено с металлическими кубиками движителя, на нижних гранях которых через изолирующие прокладки закреплены электростатические присоски, при помощи которых движитель закрепляют на рабочем столе. Сборка металлических кубиков и пьезоэлектрических вставок выполнена Н-образной формы и установлена на торцовой поверхности опорного кольца так, что центральный кубик сборки с закрепленной на нем измерительной иглой расположен соосно опорному кольцу. В рабочем столе растрового туннельного микроскопа выполнено сквозное отверстие, в котором расположено приспособление для подвода образца к измерительной игле, выполненное в виде круглой мембраны, жестко закрепленной на столе соосно отверстию, и штока, установленного с возможностью взаимодействия с мембраной. После подведения образца к игле при помощи штока и мембраны на расстояние 0,01 мм сканирование измерительной иглы по контролируемому полю образца осуществляют подачей изменяющегося напряжения на металлические кубики движителя. Стабильность положения заданного поля образца относительно положения иглы составляет ±1,2 нм в течение часа работы. 3 ил.
Фиг.З
| Приборы для научных исследова- ний | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Также, 1985, №8, с.75-79. | |||
