Известны устройства для регистрации магнитных меток,, наносимых на каротажный кабель, с применением мапнито-модуляционного и дифференциальных датчиков.
Предлагаемое устройство отличается использованием сердечника одного из дифференциальных датчиков, создающего преобладающую но величине положительную часть сигнала, выполненного из материала с большей проницаемостью, чем Проницаемость сердечника, создающего вычитаемую часть суммируемого сигнала. Это позволяет иcKv ючить регистрацию дифференциальными датчиками магнитных меток измерения длины ло ложным минимумам.
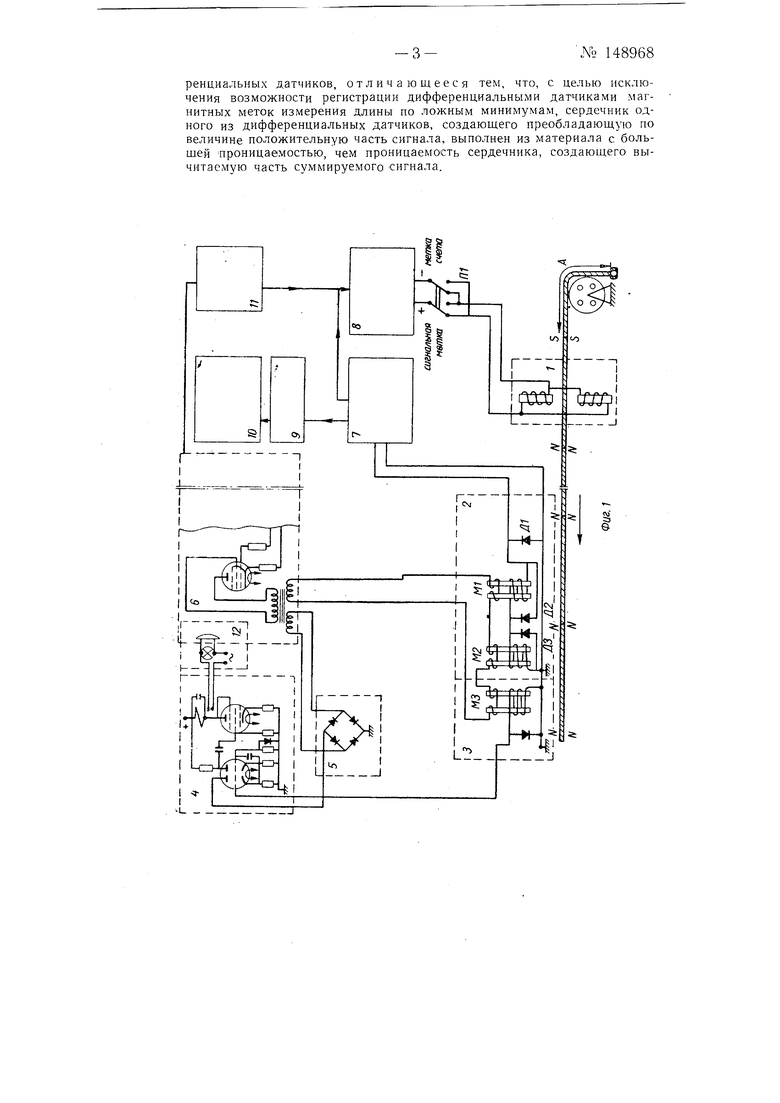
На фиг. 1 изображена схема предлагаемого устройства, на фиг. 2 - приведены кривые сигналов, поступающих от двух дифференциальных датчиков; на фиг. 3 - то же, но один из датчиков выполнен с сердечником Из материала с большой проницаемостью.
Устройство (фиг. 1) состоит из намагничивающего устройства /, считывающей системы 2 для дифференцирования с целью точной регистрации меток одной полярности, фазочувствительного усилителя 4, удвоителя 5 частоты (выпрямителя), генератора 6 тока возбуждения магнито-модуляционных датчиков, усилителя 7 дифференциальных меток, системы 8 безинерционного манесения магнитных меток на кабель, пересчетного устройства 9, индикатора 10 меток размеров (меток первой полярности), выпрямителя 11 постоянного тока, индикатора 12 меток аварийной сигнализации (меток второй полярности).
Системой 8 безынерционного нанесения магнитных меток через переключатель П1 на кабель наносятся метки двух .полярностей: в зависимости от положения переключателя Я/ «метка счета или «сигналь№ 148968 2ная метка. В намагничивающем устройстве магниты включены навстречу и каждая из меток при изменении полярности тока будет иметь максимум магнитного поля противоположной полярности.
Считывающая система 2, работающая по принципу, описанному в авт. св. № 130589, регистрирует двумя магнито-модуляционнымч датчиками, сдвинутыми в пространстве, каждый из сигналов и суммирует их на выходе с помощью диодов Д2, ДЗ, а затем, срезая отрицательную часть суммарной кривой диодом Д1, обеспечивает подачу на вход усилителя 7 дифференциальных меток нулевого уровня сигнала при прохождении мимо системы 2.
Устройство 3 для считывания «сигнальных меток не реагирует на все проходящие мимо него «метки счета, а реагирует только на «сигнальную метку 5, устанавливаемую на расстоянии А от скважинного прибора.
Устройство 3 выполняется в виде магнито-модуляционного датчика МЗ, который Помещается на расстоянии 2-3 см от датчиков М} и М2. Обмотка возбуждения датчика МЗ включается последовательно с обмотками датчиков М и М2 и питается от общего генератора 6 тока возбуждения. От этого же генератора питается удвоитель 5 частоты. При условии, что генератор 6 дает ток частотой FI, получим на выходе удвоителя частоту 2F. Напряжение удвоенной частоты подается для питания анода фазочувствительного усилителя 4.
При воздействии магнитной метки на датчики М, М2, МЗ в их измерительных обмотках ПОЯВ.ИТСЯ сигнал удвоенной частоты, амплитуда которого зависит от величины составляющей магнитного поля, а фаза изменится на 180° при изменении полярности магнитного поля.
Таким образом усилитель 4, -включенный на выходе датчика МЗ, реагирует только на «сигнальные метки, не влияя на процесс записи «меток счета при измерении длины кабеля. Последовательное включение обмоток датчиков, предназначенных для различных целей, а также питание одной частотой датчиков и фазочувствительного усилителя, дает возможность стабилизировать работу схемы.
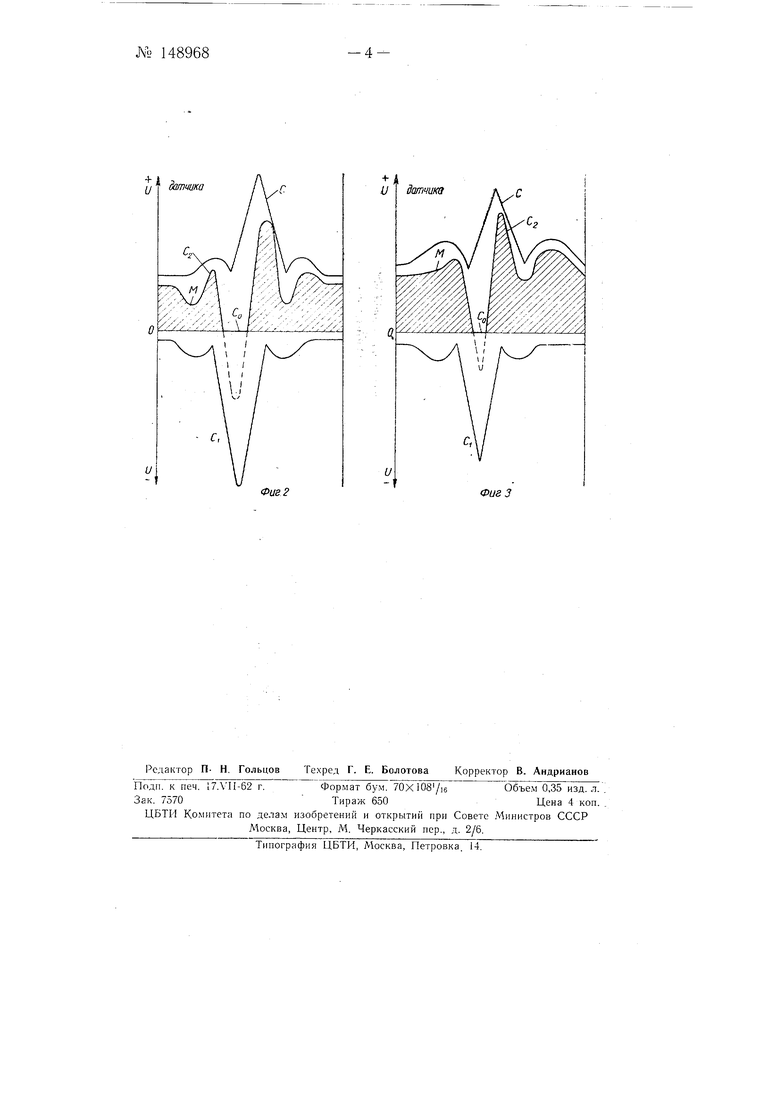
После суммирования сигналов С и С (фиг. 2 и 3) поступающих от двух датчиков, на сум-марной кривой Сд имеют место минимумы М которые могут привести к ложному срабатыванию системы. Увеличение разбаланса в датчике, обеспечивающем положительную часть кривой, одновременно приведет к уменьшению его чувствительности и к понижению крутизны суммарной кривой, что весьма важно для точности нанесения магнитных меток.
Для устранения этого недостатка один из датчиков (датчик сигнала С) выполняется с повышенной чувствительностью. Материал для его сердечника применяется с большей проницаемостью, чем материал сердечников в датчике отрицательной части сигнала (сигнал Ci). В этом случае сигнал С (фиг. 3) всегда будет преобладать над сигналом Ci, обеспечивая достаточно высокий уровень ложных минимумов, и тем самым исключая возможность срабатывания реле.
Сочетание фазочувствительной системы с дифференциальной сист-емой повышенной надежности обеспечивает надежную регистрацию и разделение сигналов.
Опытный образец устройства был изготовлен, испытан и показал положительные результаты.
Предмет изобретения
Устройство для регистра-ци} магнитных меток, наносимых на каротажный кабель, с применением магнито-модуляционного и дифференциальных датчиков, отличающееся тем, что, с целью исключения возможности регистрации дифференциальными датчиками магнитных меток измерения длины по ложным минимумам, сердечник одного из дифференциальных датчиков, создающего преобладающую по величине положительную часть сигнала, выполнен из материала с большей проницаемостью, чем проницаемость сердечника, создающего вычитаемую часть суммируемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмокаротажный зонд | 1961 |
|
SU148919A1 |
| Магнитометр | 1979 |
|
SU834623A1 |
| ЗОНД ДЛЯ СКВАЖИННОГО ОПРЕДЕЛИТЕЛЯ МЕТАЛЛА | 1992 |
|
RU2051391C1 |
| УСТРОЙСТВО ДЛЯ ОТЛ\ЕТКИ ГЛУБИН ПРИ ГЕОФИЗИЧЕСКОМ ИССЛЕДОВАНИИ СКВАЖИН | 1971 |
|
SU303424A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТОЧКИ ПРИХВАТА В БУРИЛЬНЫХ ТРУБАХ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЯ МАГНИТНОЙ ПРОНИЦАЕМОСТИ УКАЗАННЫХ ТРУБ | 2006 |
|
RU2327868C2 |
| ТРОС ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ ИЗМЕРЕНИЙ, ОБОРУДОВАННЫЙ МАГНИТНОЙ НИТЬЮ | 2012 |
|
RU2504608C2 |
| Устройство для измерения глубины при каротаже скважин | 1976 |
|
SU610989A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ КАРОТАЖА | 1987 |
|
SU1487620A1 |
| Устройство для обнаружения магнитных меток на стальных канатах | 1959 |
|
SU128638A1 |
| Устройство для измерения составляющих вектора магнитного поля в скважине | 1981 |
|
SU989509A1 |
датчика
Фиг 2
Фиг 3
