iu&
ешгА,
Фие.1
gbfx
J&
Изобретение относится к электро- Иашинам автоматических устройств и может быть использовано в качестве датчика угла для линейного преобразо- вания угла поворота в фазу выходного напряжения в фазовых следящих системах и в аналого-цифровых преобразова- телях класса угол-фаза-временной ин- |тервал-код.
I Цель изобретения - повышение точ- |ности преобразования угла поворота в |фазу выходного напряжения в двухфазных многополюсных злектромашинных фазовращателях (ФВ) путем частичной I компенсации фазовой погрешности вве- i дением регзшировочной фазовой погреш I нести, ПРОТИВОПОЛОЖНОЙ по знаку ос- 1новной погрешности.
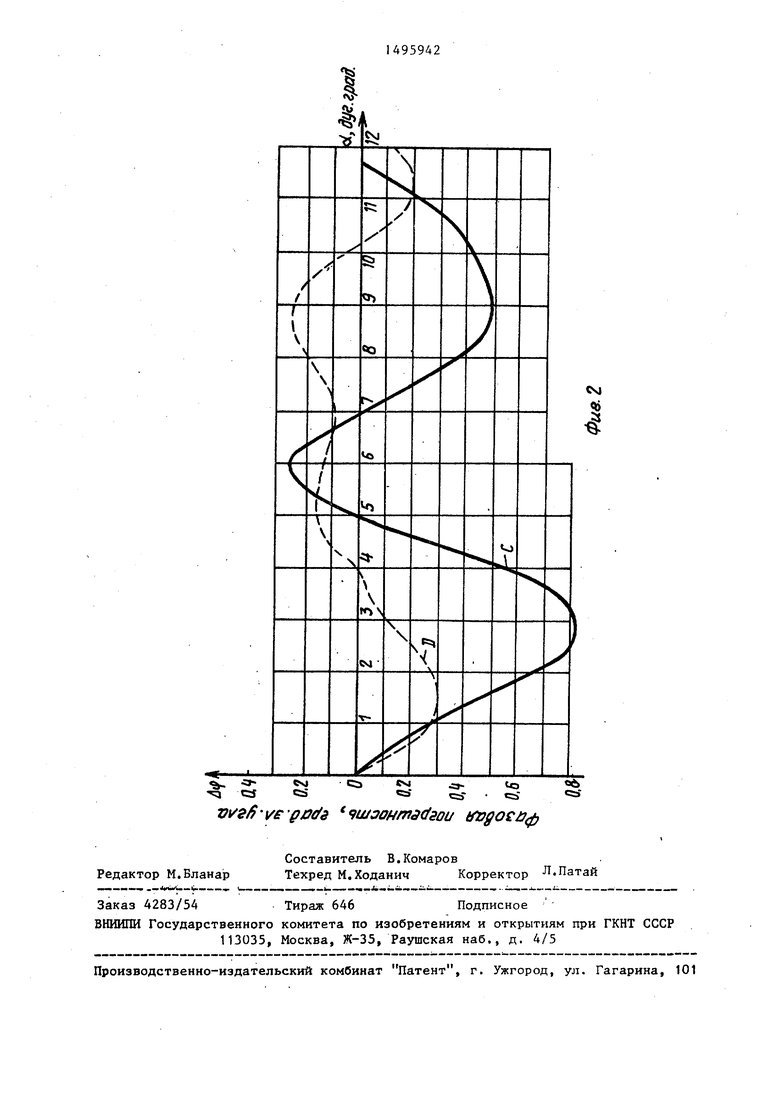
J На фиг.1 изображена принципиаль- : ная схема фазовращателяj на фиг,2 - ; экспериментальные кривые фазовой по- : грешности до введения регулировочных элементов (С) и после введения регулировочных .элементов (D) . ; Фазовращатель содержит синусо- ; идально распределенные квадратурные обмотки 1 и 2 возбуждения, синусоидально распределенную обмотку 3 опорного напряжения, выходную сосредо- точенную обмотку 4 типа зубец-полюс, регулировочный элемент, содержащий элементы 5 и 6 сопротивления. Обмотка опорного напряжения через регулировочные элементы подключена к об- моткам возбуждения.
Обмотки возбуждения питаются от двухфазного источника питания двумя синусоидальными напряжениями, рые должны быть равны по амплитуде и сдвинуты по фазе на 90. Например, на обмотку 1 подается напряжение
U sinWt, напряжение
а на обмотку 2 подаU2
cosW t. Для
hi
режима холостого хода в идеальном случае, т.е. при отсутствии погрешностей как поворотного трансформатора, -так и источника питания, фазовая погрешность отсутствует, поэтому подключение регулировочных элементов 5 и 6 не требуется, а выражение для выходного напряжения имеет вид
Ц
40(
,sin(a) t - у, - v
I ,-(1)
и
(fu)m
м
на-амплитуда выходногопряженияi
-круговая частота напряжения питания;
Vf . х ctgX , ,Г
-фазовый угол между током и напряжением питания,-индуктивное и активное . сопротивление фазы обмотки возбуждения;
-число пар полюсов ФВ;
-угол поворота ротора ФВ. Фаза напряжения выходной обмот4, отсчитьшаемая относительно фанапряжения опорной обмотки 3,рав
Р of
Ч,,
-Рс(.
(2)
Возможны отклонения от идеальных значений параметров двухфазного источника питания и параметров поворот- ного трансформатора и тогда возникает фазовая погрешность - отклонение от линейного закона преобразования yrns поворота в фазу выходного напряжения ФВ AU -If- IP, .
. X-f-JjifqKT (4-3) рЧСч
,(3)
где if - фактическое (экспёри- ментапьное) значение фазы напряжения выходной обмотки ФВ{
Ц7 - расчетное (идеальное) значение фазы напряжения выходной обмотки ФВ.
Для многополюсных двухфазных ФВ определяющей погрешностью является фазовая погрешность интервалов
--- , которая в первом приближении
описывается гармоническим рядом,имеющим вид
г ЛЦ A cosPrf+ в; 81пРо + A2COs2Po(+
+ B sin2-Po(
(4)
где АО,А,В,
г
В,
- соответствующие коэффициенты ряда Фурье данной функции dtf. В свою очередь в составе фазовой погрешности интервалов определяющее значение имеют постоянная составляющая Ад и вторые гармоники А и Bjj, т.е. часть погрешности ФВ, определяемая выражением
ЛЧ
Аа+ A cos2Po(+ B,jsin2Po(. (5)
51495942
Для частичной компенсации фазовой погрешности интервалов искусственно ке создают регулировочную фа зовую погрешность, противоположную по знаку и и близкую по величине основной фазо- 5
ную
вой погрешности а if., путем подключения соответствующих регулировочных элементов Zj и Z/ .
Подключение регулировочных элементов Zj и Z на создание регулировочной фазовой погрешности влияет следующим образом,Учитывается регулировочная фазовая погреишость, вносимая только за счет индуктивной связи выходной обмотки с обмоткой опорного напряжения при протекании по ней тока, в результате подключения регулировочных элементов Z j
Рассмотрим случай, когда в качестве регулировочного элемента Zj- включен резистор R, а элемент Z f отсутствует, т.е. случай, когда Z
20
R
5
Известная методика определения фазовой погрешности d(f основана на выделении сигнала ошибки U4 из общего выражения выходной ЭДС U.
В соответствии с этой методикой, если U4 U(4o+ -зи,, , где U4o Ц .sin (Ы t +0 ) - выходная ЭДС
С40|1
для идеального случая, а aU4 (u)t +0), то при малых значениях Л tf, когда , -й
йс, Шл1 sin (e-t-e,), (6)
(40;.
где dtf- фазовая погрешность в.электрических радианах. В предлагаемом фазовращателе до- . полнительное напряжение (сигнал ошибки) U4-3 индуктированное в выходной обмотке 4 за счет протекания тока по обмотке 3 опорного напряжения, подключенной через резистор R5 ЕЗ к напряжению питания U, Uf|,sintot, имеет вид
/JU4-3 44-3) %-эР
RJ (4-Э)тт,
ш-1плитудное значение напряжения питанияJ максимальное значение согде
Л1Тл
%-31т --
Ub25
30
35
40
50
V,
(1-3)
00 с учетом (6) : ±. +А coslPcl ± В ,
(8
10
где А 4Uci-J)hl (49) fT,
; (9)
sin(v,+tf(,.3j) 15
В
(,.,,).
4
при Z со и
(10)
RJ выражение для
регулировочной фазовой погрешности имеет вид
%-зГ ° 2Pc/f Bsin2Po. (11) ,Тля случая, когда в качестве регулировочного элемента Zg включен конденсатор емкости С, а элемент
Хс X.
Z отсутствует, т.е. когда л ..х, где Xj.g 1/W Cf, а Z оо выражение для регулировочной фазовой погреш ности идентично выражению (11) для
Z. R
б
а Z,
случая, когда
При Z Xci и Zf выражение для регулировочной фазовой погрешности имеет вид
4if(..j, tA t А cos2PcC± Bsin2Po/.(l2)
Как видно из сравнения с выражением (8), погрешность (12) имеет противоположном знак по сравнению с погрешностью (8).
Путем включения двух одинаковых резисторов как видно из сложения выражений (7) и (10), можно получить g выражение регулировочной погрешности без синусной составляющей:
d(
(+-3)
2А - 2А cos2Pc.
(13)
А путем параллельного включения одинаковых по величине сопротивления резистора R и конденсатора С,т.е,
Ч4-3)т
V3
при Rg Xj.j, а Zf 00, как видно из сложения выражений (10) и (11),
противления взаимоиндук- 55 получить выражение регулировочции между обмотками 4 ой погрешности без косинусной сосPJ 3 тавляющей
фазовый угол между напряжениями и 4- 3 и и ,
l/U(4 - ЗГ
2Bsin2Pef.
(14)
ке и
б
Из выражений (1) и (7) по методи- С-6) можно определить регулировочную фазовую погрешность при Z R
00 с учетом (6) : ±. +А coslPcl ± В ,
(8)
где А 4Uci-J)hl (49) fT,
; (9)
sin(v,+tf(,.3j) 15
В
(,.,,).
4
(10)
при Z со и
RJ выражение для
регулировочной фазовой погрешности имеет вид
%-зГ ° 2Pc/f Bsin2Po. (11) ,Тля случая, когда в качестве регулировочного элемента Zg включен конденсатор емкости С, а элемент
Хс X.
Z отсутствует, т.е. когда л ..х, где Xj.g 1/W Cf, а Z оо выражение для регулировочной фазовой погрешности идентично выражению (11) для
35
Z. R
б
а Z,
случая, когда
При Z Xci и Zf выражение для регулировочной фазовой погрешности имеет вид
40
4if(..j, tA t А cos2PcC± Bsin2Po/.(l2)
Как видно из сравнения с выражением (8), погрешность (12) имеет противоположном знак по сравнению с погрешностью (8).
Путем включения двух одинаковых резисторов как видно из сложения выражений (7) и (10), можно получить g выражение регулировочной погрешности без синусной составляющей:
d(
(+-3)
2А - 2А cos2Pc.
(13)
50
А путем параллельного включения одинаковых по величине сопротивления резистора R и конденсатора С,т.е,
при Rg Xj.j, а Zf 00, как видно из сложения выражений (10) и (11),
l/U(4 - ЗГ
2Bsin2Pef.
(14)
Таким образом, путем изменения величин сопротивления R и Х, регулировочных элементов и Z и комби- Нации схем их включений можно измерять как величину, так и знак регулировочной фазовой погрешности и таким путем осуществлять компенсацию постоянной составляющей и второй гармоники разовой погрешности интервалов ФВ, описываемой гармоническим рядом (4).
Повышение точности ФВ в случае вве цения регулировочных элементов подтверждается графически (фиг.2) экспериментально снятыми кривыми на образ- це ФВ с наружным диаметром Т)„ 50 мм и с числом пар полюсов Р 32, где } - кривая зависимости фазовой погрешности в первом интервале от угла поворота ротора ФВ, снятая до введения регулировочных элементов, а D - ана- погичная кривая, снятая на том же № после введения регулировочных эле- чентов Pj 1,5 кОм, Р 10 кОм.Как видно из сравнения кривых С и D |(фиг,2), максимальное значение фазо- ой погрешности уменьшается в 2,7 ра- |за (с 0,87 эл.град. угла до 0,32 Ьл. град. угла).
ф Ормула изобретения
1. Индукционный электромашинный | ногополюсный двухфазный фазовраща- |гедь, содержащий подвижный и неподвижный элементы, на одном из которых Установлены две квадратурные синусоидально распределенные обмотки возбуждения и смещенная относительно ню{
0 5
0
5
на 45 эл. град, синусоидально распределенная обмотка опорного напряжения, а на другом - выходная обмотка, отличающийся тем что, с целью повьпиения точности преобразования угла поворота в фазу выходного напряжения, он снабжен регулировочным элементом, а обмотка опорного напряжения подключена к обмоткам возбуждения через регулировочный элемент.
2.Фазовращатель по п.1, о т л и- чающийся тем, что регулировоч- ньй элемент выполнен в виде резистора.
3.Фазовращатель по п.1, отличающийся тем, что регулировочный элемент выполнен в виде конденсатора.
4.Фазовращатель по п.t, о т л и- ч а ю щ и и с я тем, что регулировоч - ный элемент выполнен в виде последовательно соединенных резистора и конденсатора, точка соединения которых подключена к обмотке опорного напряжения, а другие концы последовательно соединенных резистора и конденсатора соединены с концами обмоток возбуждения .
5.Фазовращатель по п.1, о т л и- чающийся тем, что регулировочный элемент выполнен в виде последовательно соединенных резисторов, точка соединения которых подключена к обмотке опорного Напряжения,- а другие концы последовательно соединенных резисторов соединены с концами обмоток возбуждения.
« 
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1978 |
|
SU743127A1 |
| Способ контроля ортогональностиВЕКТОРОВ НАпРяжЕНий пиТАНия дВуХ-фАзНОгО фАзОВРАщАТЕля | 1979 |
|
SU834598A1 |
| Преобразователь угла поворота вала во временной интервал | 1977 |
|
SU643938A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1802913A3 |
| Электропривод переменного тока | 1984 |
|
SU1264293A1 |
| СПОСОБ РЕЗЕРВИРОВАНИЯ ФАЗОВРАЩАТЕЛЯ | 2000 |
|
RU2208835C2 |
| Вентильный электродвигатель | 1986 |
|
SU1464261A1 |
| Фазовращатель | 1975 |
|
SU504222A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Способ преобразования угла поворота вала фазовращателя в код | 1986 |
|
SU1458973A1 |
Изобретение относится к электромашинам автоматических устройств и может быть использовано в аналого-цифровых преобразователях класса угол-фаза-временной интервал-код. Целью изобретения является повышение точности преобразования угла поворота в фазу выходного напряжения, индукционный электромашинный многополюсный двухфазный фазовращатель содержит подвижный и неподвижный элементы (ротор и статор), на одном из которых установлены две квадратурные синусоидально распределенные обмотки 1 и 2 возбуждения и смещенная относительно них на 45 град. электрического угла синусоидально распределенная обмотка 3 опорного напряжения, а на другом - выходная обмотка 4. Опорная обмотка подключена через регулировочные элементы, содержащие резисторы 5 и 6 или конденсаторы, к обмоткам возбуждения. Это позволяет частично компенсировать фазовую погрешность путем введения регулировочной фазовой погрешности, противоположной по знаку основной погрешности фазовращателя. 4 с.п.ф-лы. 2 ил.
/
еч1
CsJ
N
| Ахметжанов А.А | |||
| Высокоточные системы передачи угла автоматических устройств | |||
| М.: Энергия, 1975, с.68 | |||
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1978 |
|
SU743127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
