1
(21)4229363/24-28, 4229362/28
(22)13.04.87
(46) 30.08.89. Бюл. № 32
(71)Уфимский авиационный институт им. Серго Орджоникидзе
(72)М.А.Ураксеев, Р.Ю.Мукаев и А.А.Абакумов
(53)621.317.39:531.717(088.8) (56)Куликовский К.Л., Купер В.Я. Методы и средства измерений. М.: Энергоатомиздат, 1986, с. 366-367.
Авторское свидетельство СССР № 702399, кл. G 01 В 7/00, 1978.
(54)ДИСКРЕТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
(57)Изобретение относится к измери тельной технике и может быть использовано при измерении положения объектов, доступ к которым затруднен, например объектов, размещенных в закрытых резервуарах. Целью изобретения является повышение точности. Постоянный магнит 1, размещенный на контролируемом изделии 2, создает Мйгнитное поле напряженностью Н.. Поле воз-
м
действует на магниточувствительный узел 3, представляющий собой однострочный преобразователь на кольцевых ферритовых сердечниках. Оигнап с магниточувствительного узла 3 nor ступает через видеоусилитель 4, амплитудный селектор 5 и блок 6 памяти, где запоминается. По сигналам с блока 8 развертки сигнал с блока 6 памяти поступает на видеоконтрольный блок 7, на котором индуцируется положение контролируемого объекта. Одновременно с блока 6 памяти через формирователь 9 импульсов, арифметический блок 10 сигнал поступает на цифровой индикатор 11, где регистрируется в виде цифрового сигнала, пропорционального положению контролируемого изделия. Блок 12 коррекции позволяет компенсировать погрешности, связанные с неравномерностью размещения ферритовых сердечников в строке магниточувствительного узла 3. 1 з.п. ф-лы, 4 ил.
т
СП
о
4 U
сх 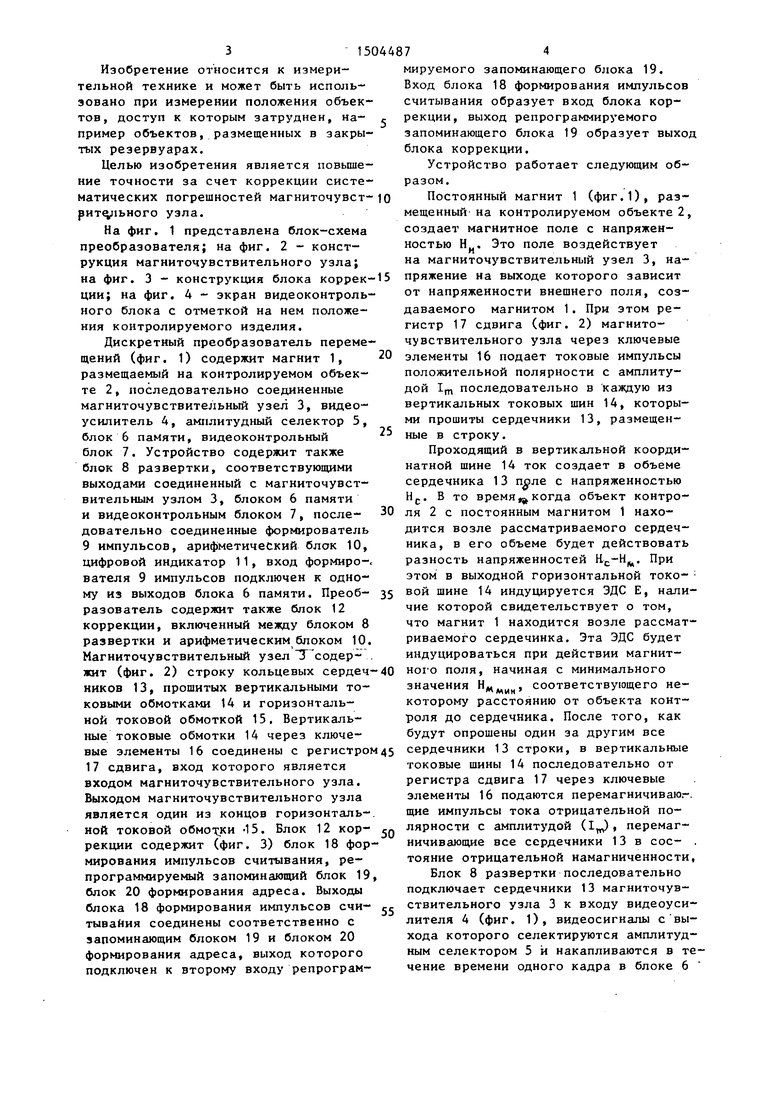
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный преобразователь магнитного поля | 1986 |
|
SU1437810A1 |
| Ферромодуляционный магнитотелевизионный дефектоскоп | 1987 |
|
SU1479869A1 |
| Преобразователь магнитного поля | 1986 |
|
SU1408351A1 |
| Линейный преобразователь магнитных полей | 1986 |
|
SU1449887A1 |
| Параметрический линейный преобразователь магнитного поля с феррорезонансным возбуждением элементов | 1989 |
|
SU1670568A1 |
| Магнитотелевизионный дефектоскоп | 1987 |
|
SU1479867A1 |
| Преобразователь магнитных полей к дефектоскопу | 1986 |
|
SU1330542A1 |
| СТРОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАГНИТНЫХ ПОЛЕЙ | 1988 |
|
RU2006850C1 |
| Однострочный преобразователь магнитного поля | 1987 |
|
SU1567965A1 |
| Магниточувствительный узел для магнитотелевизионного дефектоскопа | 1988 |
|
SU1562839A1 |
Изобретение относится к измерительной технике и может быть использовано при измерении положения объектов, доступ к которым затруднен, например объектов, размещенных в закрытых резервуарах. Целью изобретения является повышение точности. Постоянный магнит 1, размещенный на контролируемом изделии 2, создает магнитное поле напряженностью Нм. Поле воздействует на магниточувствительный узел 3, представляющий собой однострочный преобразователь на кольцевых ферритовых сердечниках. Сигнал с магниточувствительного узла 3 поступает через видеоусилитель 4, амплитудный селектор 5 и блок 6 памяти, где запоминается. По сигналам с блока 8 развертки сигнал с блока 6 памяти поступает на видеоконтрольный блок 7, на котором индуцируется положение контролируемого объекта. Одновременно с блока 6 памяти через формирователь 9 импульсов, арифметический блок 10 сигнал поступает на цифровой индикатор 11, где регистрируется в виде цифрового сигнала, пропорционального положению контролируемого изделия. Блок 12 коррекции позволяет компенсировать погрешности, связанные с неравномерностью размещения ферритовых сердечников в строке магниточувствительного узла 3. 1 з.п.ф-лы, 4 ил.
фиг. 1
Изобретение относится к измерительной технике и может быть использовано при измерении положения объектов, доступ к которым затруднен, на- пример объектов, размещенных в закрытых резервуарах.
Целью изобретения является повышение точности за счет коррекции систематических погрешностей магниточувст- рит льного узла.
На фиг. 1 представлена блок-схема преобразователя; на фиг. 2 - конструкция магниточувствительного узла; на фиг. 3 - конструкция блока коррек- ции; на фиг. 4 - экран видеоконтрольного блока с отметкой на нем положения контролируемого изделия.
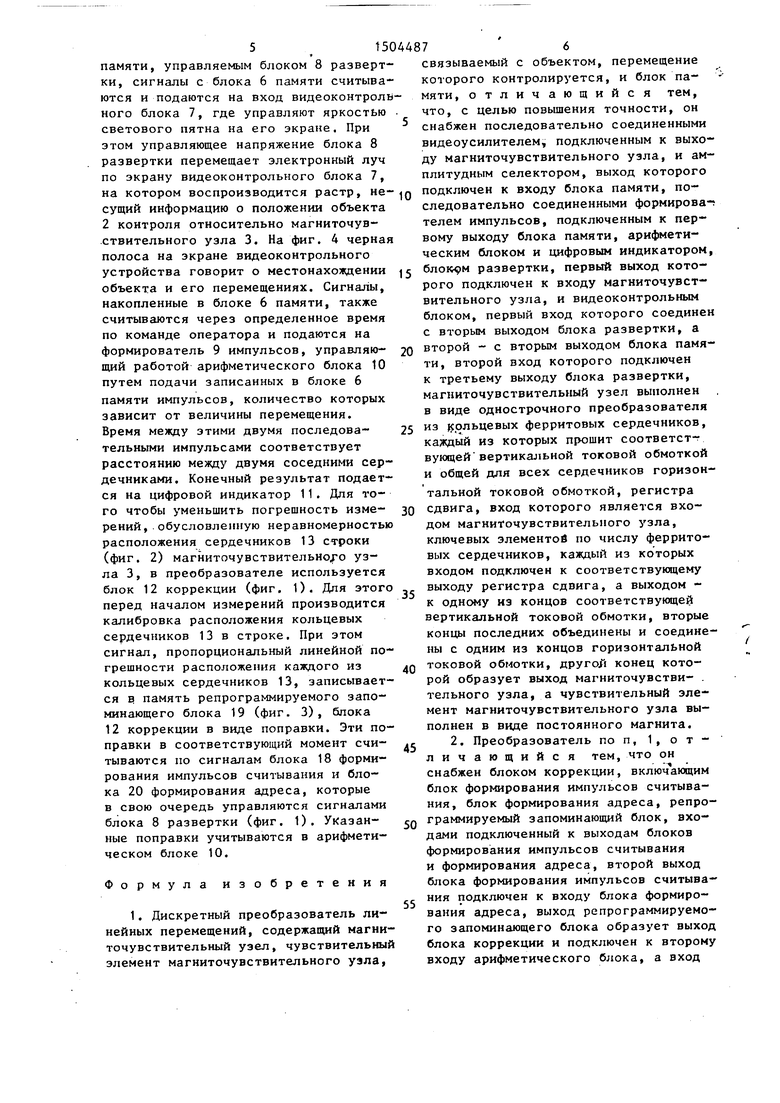
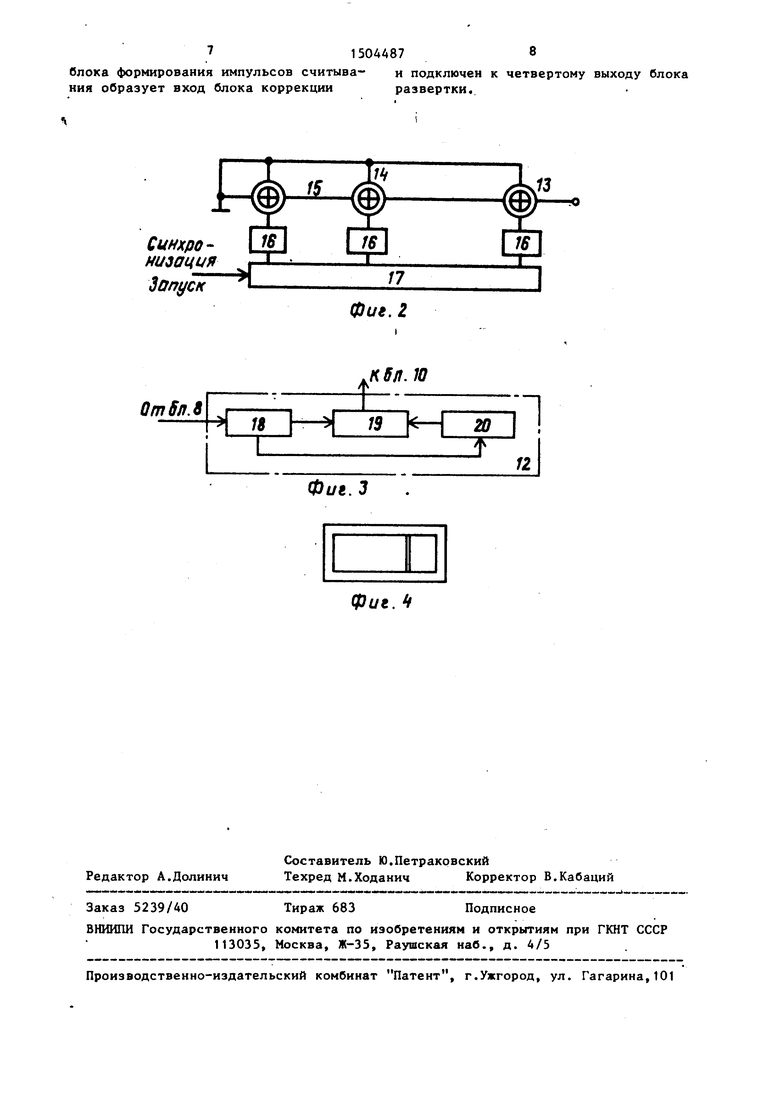
Дискретный преобразователь перемещений (фиг. 1) содержит магнит 1, размещаемый на контролируемом объекте 2 , последовательно соединенные магниточувствительный узел 3, видеоусилитель 4, амплитудный селектор 5, блок 6 памяти, видеоконтрольный блок 7. Устройство содержит также блок 8 развертки, соответствующими выходами соединенный с магниточувст- вительным узлом 3, блоком 6 памяти и видеоконтрольным блоком 7, после- довательно соединенные формирователь 9 импульсов, арифметический блок 10, цифровой индикатор 11, вход формирователя 9 импульсов подключен к одному из выходов блока 6 памяти. Преоб- разователь содержит также блок 12 коррекции, включенный межау блоком 8 развертки и арифметическим блоком 10. Магниточувствительный узел Т содер- жит (фиг. 2) строку кольцевых сердеч НИКОВ 13, прошитых вертикальными токовыми обмотками 14 и горизонтальной токовой обмоткой 15. Вертикальные токовые обмотки 14 через ключевые элементы 16 соединены с регистро 17 сдвига, вход которого является входом магниточувствительного узла. Выходом магниточувствительного узла является один из концов горизонтальной токовой обмотки -15. Блок 12 кор- рекции содержит (фиг. 3) блок 18 формирования импульсов считывания, ре- программируемый запоминающий блок 19 блок 20 формирования адреса. Выходы блока 18 формирования импульсов счи- тыаайия соединены соответственно с запоминающим блоком 19 и блоком 20 формирования адреса, выход которого подключен к второму входу репрограм5
5
0 0 5 0 5 Q
мируемого запоминающего блока 19. Вход блока 18 формирования имлульсов считывания образует вход блока коррекции, выход репрограммируемого запоминающего блока 19 образует выход блока коррекции.
Устройство работает следующим образом.
Постоянный магнит 1 (фиг.1), размещенный на контролируемом объекте 2, создает магнитное поле с напряженностью Н . Это поле воздействует на магниточувствительный узел 3, напряжение на выходе которого зависит от напряженности внешнего поля, создаваемого магнитом 1. При этом регистр 17 сдвига (фиг. 2) магниточувствительного узла через ключевые элементы 16 подает токовые импульсы положительной полярности с амплитудой IP, последовательно в каждую из вертикальных токовых шин 14, которыми прошиты сердечники 13, размещенные в строку.
Проходящий в вертикальной координатной шине 14 ток создает в объеме сердечника 13 с напряженностью Hj... В то время когда объект контроля 2 с постоянным магнитом 1 находится возле рассматриваемого сердечника, в его объеме будет действовать разность напряженностей Ej,-H. При этом в выходной горизонтальной токо- вой шине 14 индуцируется ЭДС Е, наличие которой свидетельствует о том, что магнит 1 находится возле рассматриваемого сердечинка. Эта ЭДС будет индуцироваться при действии магнитного поля, начиная с минимального значения Н, соответствующего некоторому расстоянию от объекта контроля до сердечника. После того, как будут опрошены один за другим все сердечники 13 строки, в вертикальные токовые шины 14 последовательно от регистра сдвига 17 через ключевые элементы 16 подаются перемагничиваю.-. щие импульсы тока отрицательной полярности с амплитудой (1 перемаг- ничивающие все сердечники 13 в сое- . тояние отрицательной намагниченности,
Блок 8 развертки последовательно подключает сердечники 13 магниточувствительного узла 3 к входу видеоусилителя 4 (фиг. 1), видеосигналы с выхода которого селектируются амплитудным селектором 5 и накапливаются в течение времени одного кадра в блоке 6
памяти, управляемым блоком 8 развертки, сигналы с блока 6 памяти считываются и подаются на вход видеоконтрольного блока 7, где управляют яркостью светового пятна на его экране. При этом управляющее напряжение блока 8 развертки перемещает электронный луч по экрану видеоконтрольного блока 7,
на котором воспроизводится растр, подключен к входу блока памяти, по-
сущий информацию о положении объекта 2 контроля относительно магниточувствительного узла 3. На фиг. 4 черная полоса на экране видеоконтрольного устройства говорит о местонахождении объекта и его перемещениях. Сигналы, накопленные в блоке 6 памяти, также считываются через определенное время по команде оператора и подаются на формирователь 9 импульсов, управляющий работой арифметического блока 10 путем подачи записанных в блоке 6 памяти импульсов, количество которых зависит от величины перемещения. Время между этими двумя последовательными импульсами соответствует расстоянию между двумя соседними сердечниками. Конечный результат подается на цифровой индикатор 11. Для того чтобы уменьшить погрешность измерений, обусловленную неравномерностью расположения сердечников 13 строки (фиг. 2) магниточувствительного узла 3, в преобразователе используется блок 12 коррекции (фиг. 1). Для этого перед началом измерений производится калибровка расположения кольцевых сердечников 13 в строке. При этом сигнал, пропорциональный линейной погрешности расположения каждого из кольцевых сердечников 13, записывается э память репрограммируемого запоминающего блока 19 (фиг. 3), блока 12 коррекции в виде поправки. Эти поправки в соответствующий момент считываются по сигналам блока 18 формирования импульсов считывания и блока 20 формирования адреса, которые в свою очередь управляются сигналами блока 8 развертки (фиг. 1). Указанные поправки учитываются в арифметическом блоке 10.
Формула изобретения
15
20
следовательно соединенными формирова телем импульсов, подключенным к первому выходу блока памяти, арифметическим блоком и цифровым индикатором блокам развертки, первый выход которого подключен к входу магниточувствительного узла, и видеоконтрольным блоком, первый вход которого соедине с вторым выходом блока развертки, а второй - с вторым выходом блока памя ти, второй вход которого подключен к третьему выходу блока развертки, магниточувствительный узел выполнен в виде однострочного преобразователя 25 из {ольцевых ферритовых сердечников каждый из которых прошит соответст-г вующей вертикальной токовой обмоткой и общей для всех сердечников горизон тальной токовой обмоткой, регистра сдвига, вход которого является входом магниточувствительного узла, ключевых элементов по числу ферритовых сердечников, каждый из которых входом подключен к соответствующему выходу регистра сдвига, а выходом - к оц,нану из концов соответствующей вертикальной токовой обмотки, вторые концы последних объединены и соедине ны с одним из концов горизонтальной токовой обмотки, другой конец которой образует выход магниточувстви- . тельного узла, а чувствительный элемент магииточувствительного узла выполнен в виде постоянного магнита.
30
35
40
45
50
55
граммируемый запоминающий блок, входами подключенный к выходам блоков формирования импульсов считывания и формирования адреса, второй выход блока формирования импульсов считыва ния подключен к входу блока формирования адреса, выход репрограммируемо го запоминающего блока образует выхо блока коррекции и подключен к втором входу арифметического блока, а вход
связываемый с объектом, перемещение которого контролируется, и блок памяти, отличающийся тем, что, с целью повышения точности, он снабжен последовательно соединенными видеоусилителем, подключенным к выходу магниточувствительного узла, и амплитудным селектором, выход которого
Q подключен к входу блока памяти, по-
5
0
следовательно соединенными формирова- телем импульсов, подключенным к первому выходу блока памяти, арифметическим блоком и цифровым индикатором, блокам развертки, первый выход которого подключен к входу магниточувствительного узла, и видеоконтрольным блоком, первый вход которого соединен с вторым выходом блока развертки, а второй - с вторым выходом блока памяти, второй вход которого подключен к третьему выходу блока развертки, магниточувствительный узел выполнен в виде однострочного преобразователя 5 из {ольцевых ферритовых сердечников, каждый из которых прошит соответст-г вующей вертикальной токовой обмоткой и общей для всех сердечников горизонтальной токовой обмоткой, регистра сдвига, вход которого является входом магниточувствительного узла, ключевых элементов по числу ферритовых сердечников, каждый из которых входом подключен к соответствующему выходу регистра сдвига, а выходом - к оц,нану из концов соответствующей вертикальной токовой обмотки, вторые концы последних объединены и соединены с одним из концов горизонтальной токовой обмотки, другой конец которой образует выход магниточувстви- . тельного узла, а чувствительный элемент магииточувствительного узла выполнен в виде постоянного магнита.
5
0
5
граммируемый запоминающий блок, входами подключенный к выходам блоков формирования импульсов считывания и формирования адреса, второй выход блока формирования импульсов считывания подключен к входу блока формирования адреса, выход репрограммируемо- го запоминающего блока образует выход блока коррекции и подключен к второму входу арифметического блока, а вход
715044878
блока формирования импульсов считыва- и подключен к четвертому выходу блока ния образует вход блока коррекции развертки.
Г JL Ж
)Синхро- I низация
Запуск
Фие. J
о
16
17
фиг, 2
.кбп.ю
Фие.
