го
(Л
сд
О)
ел
10
3150
пространства, предъявляемой оператору (водителю) в ходе обучения навыкам вождения и управления транспортными средствами. Цель изобретения - повьшение точности работы и улучшение качества обучения навыкам вождения. Имитатор содержит кабину 1 транспортного средства с лобовым стеклом 4, креслом 2 обучаемого и органа- ми 3 управления (вождения), сопряженный с управляющим устройством 5 тренажера через гейератор изображения телевизионный проектор 7 с проекционным объективом 8 и установленный перед лобовьш стеклом кабины экран. Проектор 7 развернут своей апертурой в сторону лобового стекла, на котором дополнительно нанесено светоделитель- ное покрытие, изламывающее оптичес- кую ось проектора в сторону экрана
и оптически сопрягающее выходной зрачок проекционного объектива с зоной расположения глаз обучаемого..При этом телепроектор снабжен блоком 20 сервоприводов перемещения по трем линейным координатам, а в состав имитатора введено наголовное приспособление 22 для обучаемого с укрепленньши на нем реперными элементами 23, Внутри кабины установлены блоки дополнительно введенного измерителя 9 линейных перемещений реперных элементов наголовного приспособления, при этом выходы измерителя и выходы сервоприводов электрически связаны с устройством 5. При перемещении головы обучаемого подается команда на устройство 5, обеспечивающее пропорциональное перемещение телевизионного проектора 7 , 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ТРЕНАЖЕРА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2245582C9 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ДЛЯ СТЕНДА МОДЕЛИРОВАНИЯ С ОБЗОРНО-ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 2001 |
|
RU2202829C2 |
| Способ исключения эффекта разделения изображения рамками мониторов визуализации внекабинной обстановки авиационных тренажеров | 2018 |
|
RU2695480C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| Устройство имитации визуальной обстановки тренажера оператора транспортного средства | 1981 |
|
SU1010641A1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2004 |
|
RU2277725C1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2230370C2 |
Изобретение относится к тренажеростроению, а именно к оптикоэлектронным системам имитации внешней обстановки, и может быть использовано для визуализации картины окружающего пространства, предъявляемой оператору (водителю) в ходе обучения навыкам вождения и управления транспортными средствами. Цель изобретения - повышение точности работы и улучшение качества обучения навыкам вождения. Имитатор содержит кабину 1 транспортного средства с лобовым стеклом 4, креслом 2 обучаемого и органами 3 управления (вождения), сопряженный с управляющим устройством 5 тренажера через генератор изображения телевизионный проектор 7 с проекционным объективом 8 и установленный перед лобовым стеклом кабины экран. Проектор 7 развернут своей апертурой в сторону лобового стекла, на котором дополнительно нанесено светоделительное покрытие, изламывающее оптическую ось проектора в сторону экрана и оптически сопрягающее выходной зрачок проекционного объектива с зоной расположения глаз обучаемого. При этом телепроектор снабжен блоком 20 сервоприводов перемещения по трем линейным координатам, а в состав имитатора введено наголовное приспособление 22 для обучаемого с укрепленными на нем реперными элементами 23. Внутри кабины установлены блоки дополнительно введенного измерителя 9 линейных перемещений реперных элементов наголовного приспособления, при этом выходы измерителя и выходы сервоприводов электрически связаны с устройством 5. При перемещении головы обучаемого подается команда на устройство 5, обеспечивающее пропорциональное перемещение телевизионного проектора 7. 2 ил.
Изобретение относится к тренажеростроению, а конкретно к оптико-электронным системам имитации внешней обстановки, и может быть использовано дЛя визуализации картины окружающего пространства, предъявляемой оператору (водителю) В ходе обучения навыкам вождения и управления транспортньии средствами.
Цель изобретения - повышение точ- ности имитации и улучшения качества обучения навыкам .вохсдения.
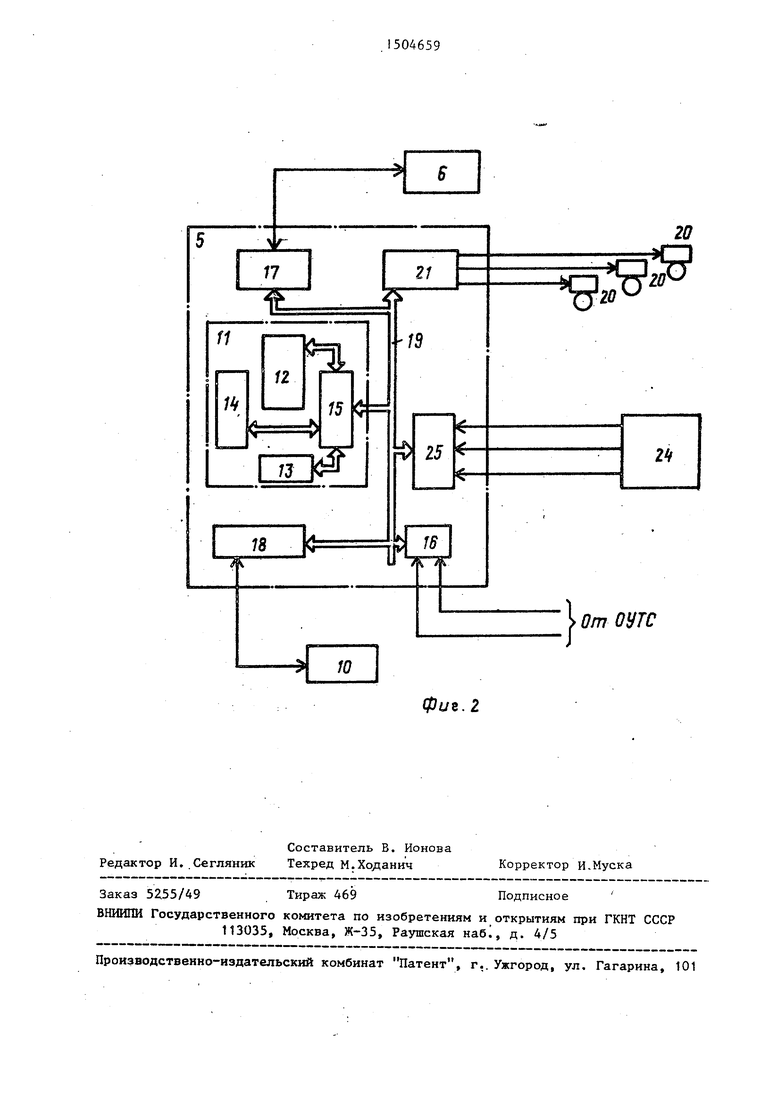
На фиг. 1 представлена конструктивно-функциональная схема имитатора внешней визуальной обстановки трена- жера транспортного средства; на фиг. 2 - то же, функциональная блок-схема.
Имитатор содержит (фиг. О кабину с креслом оператора 2 и .органами 3 уп равления и лобовым стеклом 4. Орга - ны 3 управления (датчики рулевой колонки и педального механизма) электрически связаны с управляющим устройством тренажера 5, в которой реализованы математические модели динамики транспортного средства (включая акЙ1е- лерационные перегрузки) и кинематики относительного перестроения внешней визуальной обстановки. Устройство 5 связано с генератором 6 изображения внешней визуальной обстановки, где производится синтез изображения, подлежащего предъявлению с помощью телевизионного проектора 7 и проекционного объектива 8 на экране 9 имитатора.
Для имитации акцелерационных перегрузок, действующих на человека-оператора в процессе вождения (вследствие вибраций, ускорений и т.п.) в тренажере установлены блоки и гидромеханические элементы 10 сервосистемы перегрузки.
На телепроектор могут быть поданы сигналы не только синтезированного изображения, но и с некоторой передающей телевизионной камеры (не показано ), выполняющие функцию генератора изображения. При этом передающая камера осматривает некоторый макет (муляж) окружающего пространства (местности), а управление ее перемещением осуществляется от ЭВМ 6, реализующей подпрограмму кинематики относительного перемещения. .
Устройство 5 содержит (фиг. 2) собственно ЦВМ 11, например, Классической архитектуры, которая включает процессор 12, оперативное запоминающее устройство (ОЗУ) 13, постоянное запоминающее устройство (ПЗУ) 14 и устройство 15 управления (УУ), связанные и взаимодействующие между собой согласно принципам функционирования ЦВМ.
Связь с органами управления 3, генератором изображения внешней визуальной обстановки 6 и сервосистемой
перегрузки 10 выполнена в устройстве 5 через автономные устройства вво да-вывода 16, 17 и 18 соответственно.
Компоненты ЦВМ 11 и устройства 16, 17 и 18 ввода-вывода связаны между собой с устройством 5 посредс гвом мультиплексной шины 19.
Телепроектор 7 вкупе с проекционным объективом 8 дополнительно снабжен сервоприводами 20 для перемещения по линейным координатам (вверх - вниз влево - вправо, вперед - назад), которые подсоединены к дополнительно введенному блоку сопряжения (устройству ввода - вывода) 21. Этот блок 21 выполнен, например в виде буферных ЦАП, включенных в контуры цифровых
15 сидя в кресле 2 кабины I, наблюдае изображение на экране 9 имитатора В соответствии с концептуальной мо делью управления в зависимости от наблюдаемой обстановки обучаемый в
следящих систем сервоприводов 20. Ий- 20 действует на органы управления 3,
30
35
формация в этих регистрах обновляется по внутренним командам от устройства управления 15 ЦВМ 11.
Телепроектор 7 вкупе с проекционным .объективом 8 развернуты своей 25 апертурой в сторону лобового стекла 4, на наружной плоскости которого нанесено светоделительное покрытие (не показано), изламывающее световой поток в сторону экрана 9. Очевидно, что в некоторых случаях (например, для отрезания бликов от местного освещения пульта) указанное светоделительное покрытие может быть выполнено с пектроделительным. Посредством этого светоделительного покрытия обеспечено как в статике, так и в динамике, оптическое сопряжение выходного зрачка объектива 8 и местоположения глаз обучаемого, т.е. объектив 8 и глаза обучаемого зеркально сопряжены светоделительным покрытием по отношению к экрану 9. .1
В состав устройства дополнительно
введено надеваемое на голову обучае- дд мого наголовное приспособление 22 (каска или шлем) с укрепленными на нем реперными элементами 23 (фотоприемники, светодиоды, триппель-призмы и т.п.). С этими реперными элемента- 50 ми 23 взаимодействуют блоки измерителя 9 линейных перемещений 24, который определяет текущие координа ты репер- ных элементов (а значит и головы обучаемого ) относительно некоторых ба- ее зовых конструкций кабины I. Измеритель 24 электрически подсоединен к
40
сигналы от которых поступают в уст ройство 5, а именно через устройст во ввода 16 в ЦВМ 11, где реализов на динамика движения и кинематика носительного перемещения местных п метов имитируемого внешнего простр ства. В соответствии с уравнениями реализующими эту кинематику, от ус ройства 5 подаются сигналы в генер тор 6 изображения внешней визуальн обстановки, где синтезируются теку изображение местных предметов в со ветствующих ракурсах и взаимораспо жениях. Таким образом, на проекцио ной трубке телепроектора 7 воспрои водится синтезированное изображени совокупности местных предметов вне ней обстановки, которое проекционн объективом 8 проецируется в сторон лобового стекла 4. Светоделительно (или спектроделительное) покрытие, нанесенное на наружной поверхности лобового стекла 4, изламывает свет поток и направляет его на экран 9, поверхность которого как и в извес ном устройстве выбрана по форме,ум шающей аберрационные искажения, и лена от глаз обучаемого на конечно расстояние. Расположение объектива выбрано таким образом, что его зра выхода оптически сопряжен по отнош нию к экрану 9 с текущим местополо нием глаз обучаемого.
Осуществляя управленческие:дейс вия (тренируясь и приобретая навык управления), обучаемый невольно ил соответствии со штатным алгоритмом взаимодействия с техническими сред вами ТС отклоняет и/или поворачивае
устройству 5 введенному в
тренажера, а именно к ее состав дополнительному блоку 25 сопряжения (устройству ввода). Последнее может быть выполнено например, в виде буферного ОЗУ оп-. рашиваемого по командам из ЦВМ И. Здесь, реализована подпрограмма вычислений, управляющая через блок сопряжения 2 компенсирующими движениями сервоприйодов 20 и соответственно
перемещениями телепроектора 7 с объективом 8.
Имитатор функционирует следующим образом.
Обучаемый на тренажере оператор,
сидя в кресле 2 кабины I, наблюдает изображение на экране 9 имитатора. В соответствии с концептуальной моделью управления в зависимости от наблюдаемой обстановки обучаемый воздействует на органы управления 3,
0
5
5
д 0 е
0
сигналы от которых поступают в устройство 5, а именно через устройст- во ввода 16 в ЦВМ 11, где реализована динамика движения и кинематика относительного перемещения местных предметов имитируемого внешнего простран- . ства. В соответствии с уравнениями, реализующими эту кинематику, от устройства 5 подаются сигналы в генератор 6 изображения внешней визуальной обстановки, где синтезируются текущее изображение местных предметов в соответствующих ракурсах и взаиморасположениях. Таким образом, на проекционной трубке телепроектора 7 воспроизводится синтезированное изображение совокупности местных предметов внешней обстановки, которое проекционным объективом 8 проецируется в сторону лобового стекла 4. Светоделительное (или спектроделительное) покрытие, нанесенное на наружной поверхности лобового стекла 4, изламывает световой поток и направляет его на экран 9, поверхность которого как и в известном устройстве выбрана по форме,уменьшающей аберрационные искажения, и удалена от глаз обучаемого на конечное расстояние. Расположение объектива выбрано таким образом, что его зрачок выхода оптически сопряжен по отношению к экрану 9 с текущим местоположением глаз обучаемого.
Осуществляя управленческие:дейст- вия (тренируясь и приобретая навыки управления), обучаемый невольно или в соответствии со штатным алгоритмом взаимодействия с техническими средствами ТС отклоняет и/или поворачивает
голову в некоторой зоне перемещений, допускаемых снаряжением и рабочим, местом. Вместе с головой перемещается наголовное приспособление 22 с укрепленными на нем реперными элемен- тфми 23. Взаимодействуя с последним посредством каких-либо физических по- лфй (например, электромагнитных, акустических, оптико-локационных и-т.п.) блоки измерителя линейных перемещений 24 определяют линейные изменения текущего положения головы обучаемого ot исходного. Эти изменения в вкде, например, электрических сигналов по- в устройство 5, а именно через djjiOK сопряжения 25 к ЦВМ 1 1, где производится пересчет в систему координат изображения, а затем и телепро- eicTOpa 7. На сервоприводы 20 последнего подаются от устройства 5, а HifieHHO через блок сопряжения 21 сиг- для перемещения телепроектора 7 С:объективом 8 по координатам эквива- измеренным перемещениям голо- (глаз) обучаемого. При необходимости возможна кинематическая связь (е показана) между сервоприводом, о|гветственным за перемещение телепро- еКтора 7 вдоль оптической оси и про- е сционным объективом 8 для изменения з)еличины заднего отрезка последнего с; целью автоматического поддержания резкости изображения на экране 9. Т|аким образом осуществляется доста- тЬчно жесткая компенсационная связь м|ежду перемещением головы обучаемого (|влево - вправо, вверх - вниз, впе- р1ед - назад) и движениями телепроек- Tiopa 7 с объективом 8 (влево - впра
5
0
5
0
5
0
во, назад - вперед, вверх - вниз, со ответственно, как показано на фиг.1),
В результате такого текущего компенсационного сдвига телепроектора.7 с объективом 8 выходной зрачок последнего непрерывно оптически сопряжен с местоположением глаз обучаемого. Тем самым почти полностью исключены параллактические ошибки наблюдения изображения местных предметов на экране, возникающие из-за конечной удаленности последнего. Формула изоб.ретения
Имитатор внешней визуальной обстановки тренажера транспортного средства, содержащий кабину транспортного средства с лобовым стеклом, креслом обучаемого и органами управления, те- левизионнь1й проектор с проекционным объективом, электрически связанный с управляющим устройством через генератор изображения, и экран, установленный перед лобовым стеклом кабины, отличающийся тем, что, с целью повышения точности работы и улучшения качества обучения навыкам вождения, он снабжен сервоприводами перемещения телевизионного проектора по трем линейным координатам, наго- ловным приспособлением для обучаемо - го с закрепленными на нем реперными элементами и установленными внутри кабины блоками измерителя линейных перемещений реперных элементов, электрически связанными с управляющим устройством, причем на лобовом стекле нанесено светоделительное покрытие, а ось телевизиЬнного проектора обращена в сторону лобового стекла.
Фие.2
| Роберт Шанон и др | |||
| Applied Optics and Optical Engineering, 1965, с | |||
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
