3150
Изобретение относится к лазерной измерительной технике и предназначено для бесконтактного высокоточного измерения скорости вращения об7 ектов с шероховатой, диффузно отражающей поверхностью (например, валов) в машиностроении.
Цель Изобретения - повышение точности измерения угловой скорости ис-. следуемого объекта.
Максимально допустимое значение расстояния а ограничено требованием отсутствия декорреляции оптических отраженных сигналов в точке 2 относительно точки , выполняемым при условиях а ; с Я R, где - - длина волны излучения источника; R,- расстояние от плоскости А до освещенного участка поверхности; b - продольный размер освещенного пятна
На фиг,1 показана схема зондирования и приема отраженного излучения,
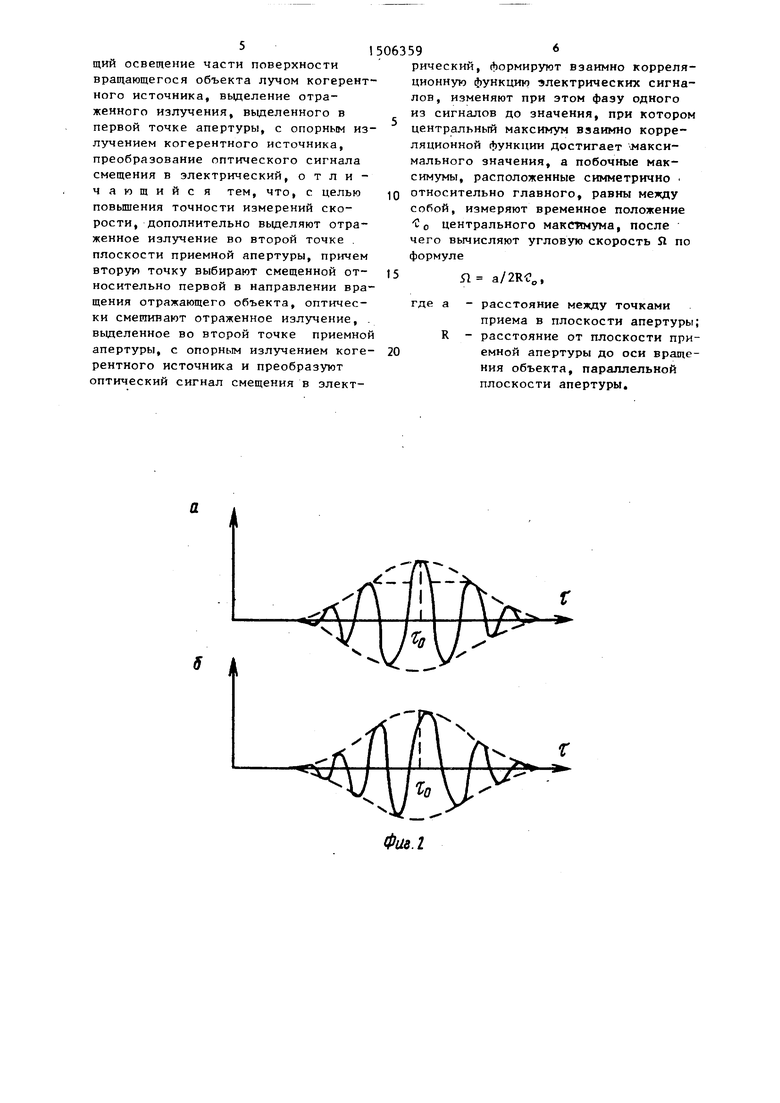
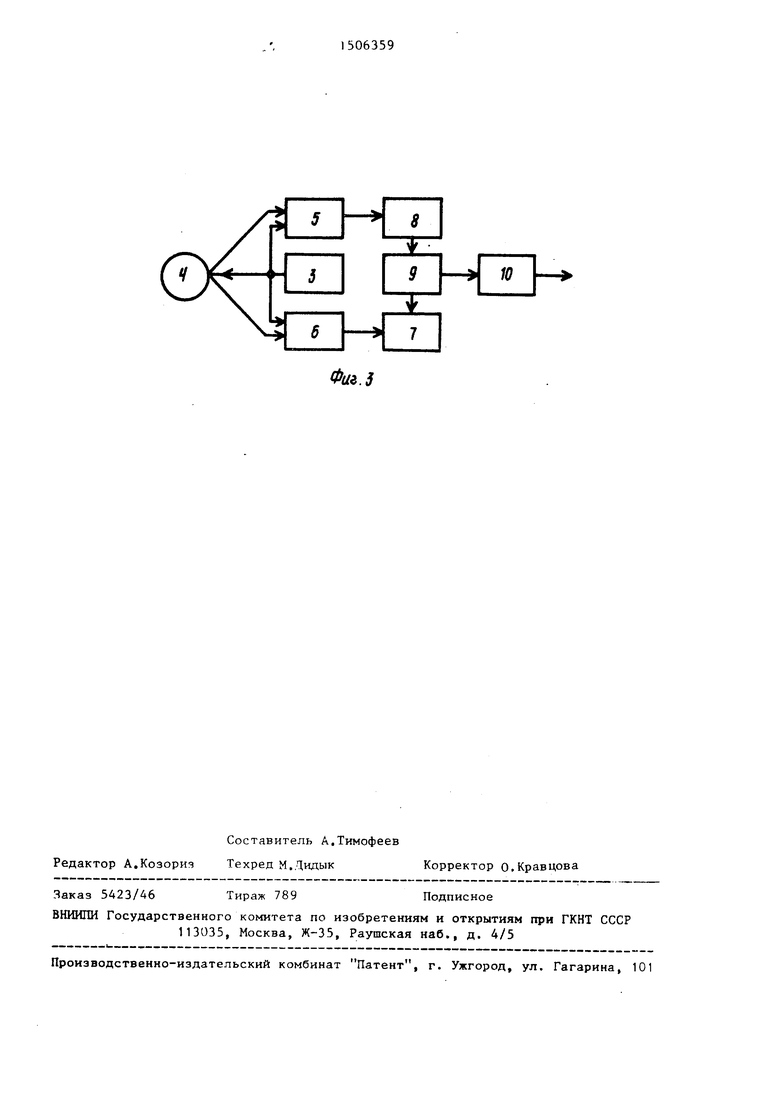
поясняющая способ измерения (1 и 2 - 5 вдоль направления освещения, точки приема излучения в плоскости При выполнении этих условий опти- приемной апертуры А); на фиг.2 - кор- ческий сигнал, принимаемый в точке релограг-1мы с изменением фазы одного из входных сигналов при выполнении условий реализации способа (а), без 20 изменения фазы одного из входных сигналов (б); на - блок-схема устройства, реализующего предлагаемый
2 после поворота объекта на угол , воспроизводит оптический сигнал, при нимаемый я точке 1 до поворота с точностью, определяемой разностью их начальных фаз. Коррелограмма сигналов смещения на выходе коррелятора 9 при этом имеет вид, приведенный 25 на фиг.За.
способ.
Устройство содерткит источник 3 излучения, объект 4, фотоприемники 5 и 6, Лазовращатели 7 и 8, коррелятор 9 и блок 10 обработки и регистрации.
Способ измерения угловой -.корос- 0 ный максимум R .(С) достигает макти реализуют следующим образом.
Участок поверхности вращающегося
си1-1ального значения, а побочные мак симумы, расположенные симметрично относительно центрального, становят ся равными между собой (фиг.Зб). 35 При этом временное положение главно максимума соответствует положению
си1-1ального значения, а побочные максимумы, расположенные симметрично относительно центрального, становятся равными между собой (фиг.Зб). 35 При этом временное положение главног максимума соответствует положению
максимума огибающей системы С.
отражающего объекта 4 освещают лучом когерентного источника 3 так, что оспьиичющий пучок п плоскости орто- , пэнаиьиой оси вращения и угол о( падения освещающего пучка на по- последующее измерение которого поз- верхность отличны от нуля. Отражен- воляет определить угловую скорость ное излучение пространственно фильт- 40 объекта S1 по формуле руют в плоскости приемной апертуры
А следующим образом. Выделяют отра-51 2R
женное излучение в точках 1 и 2 плоскости апертуры, причем точки смещены лист ducFiyf , ирдц R расстояние от плоскости А
до центра вращения 0.
Изменение фазы электрического сигнала проводят в любой из входных цепей коррелятора с помощью электрических фазовращателей 7 или 8. Воз50 можно также изменение фазы одного
на расстояние а вдоль направления смещения участка вращающейся освещенности поверхности. При повороте объекта на некоторый малый угол -je, соответствующий расстоянито а между точками 1 и 2, спекл-структура отражаемого оптического поля в запо- роженном виде также перемещается в плоскости приемной апертуры из точки 1 в точку 2. Выделенное оптически смешивают в точках 1 и 2 апертуры с опорным излучением источника и проводят преобразование оптических сигналов в электрические с помощью фотоприемников 5 и 6.
из оптических сигналов смещения, например, путем введения регулируемого фазового сдвига в опорное излучение перед смещением в одной из точек 1 55 и 2 приемной апертуры.
Формула изобретения
Способ определения угловой скорости отражающего объекта, включаюС помощью коррелятора 9 формируют взаимно корреляционную функцию R гС-С) электрических сигналов.
Максимально допустимое значение расстояния а ограничено требованием отсутствия декорреляции оптических отраженных сигналов в точке 2 относительно точки , выполняемым при условиях а ; с Я R, где - - длина волны излучения источника; R,- расстояние от плоскости А до освещенного участка поверхности; b - продольный размер освещенного пятна
вдоль направления освещения, При выполнении этих условий опти- ческий сигнал, принимаемый в точке
2 после поворота объекта на угол , воспроизводит оптический сигнал, принимаемый я точке 1 до поворота с точностью, определяемой разностью их начальных фаз. Коррелограмма сигналов смещения на выходе коррелятора 9 при этом имеет вид, приведенный на фиг.За.
Согласно способу измерения проводят изменение (регулировку) фазы одного Из коррелируемых сигналов до значения, при котором центральси1-1ального значения, а побочные максимумы, расположенные симметрично относительно центрального, становят ся равными между собой (фиг.Зб). При этом временное положение главного максимума соответствует положению
последующее измерение которого поз- воляет определить угловую скорость объекта S1 по формуле
максимума огибающей системы С.
последующее измерение которого воляет определить угловую скор объекта S1 по формуле
из оптических сигналов смещения, например, путем введения регулируемого фазового сдвига в опорное излучение перед смещением в одной из точек 1 55 и 2 приемной апертуры.
Формула изобретения
Способ определения угловой скорости отражающего объекта, включающий освещение части поверхности врагдающегося объекта лучом когерентного источника, выделение отраженного излучения, выделенного в первой точке апертуры, с опорным излучением когерентного источника, преобразование оптического сигнала смещения в электрический, отличающийся тем, что, с целью
повьшения точности измерений скорости, дополнительно выделяют отраженное излучение во второй точке . плоскости приемной апертуры, причем вторую точку выбирают смещенной относительно первой в направлении вращения отражающего объекта, оптически смертивают отраженное излучение, . выделенное во второй точке приемной апертуры, с опорным излучением когерентного источника и преобразуют оптический сигнал смещения в элект06359
рический, формируют взаимно корреляционную функцию электрических сигналов, изменяют при этом фазу одного из сигналов до значения, при котором центральный максимум взаимно корреляционной функции достигает максимального значения, а побочные максимумы, расположенные симметрично . 0 относительно главного, равны между собой, измеряют временное положение -С о центрального максгимума, после чего вычисляют угловую скорость Я по формуле
15
Л
1/2КС„,
где а - расстояние между точками
приема в плоскости апертуры; R - расстояние от плоскости приемной апертуры до оси вращения объекта, параллельной плоскости апертуры.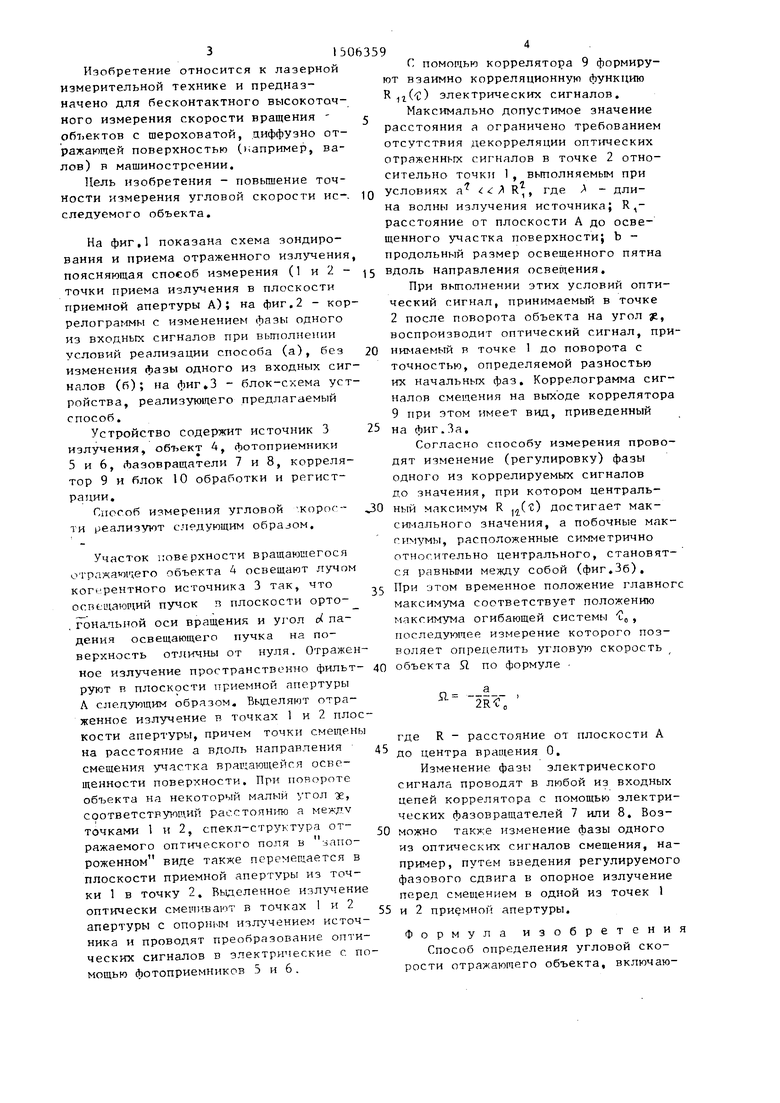
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОГО ГЕТЕРОДИННОГО ПРИЕМА ИЗЛУЧЕНИЙ | 2007 |
|
RU2349930C1 |
| ДОППЛЕРОВСКИЙ ЛАЗЕРНЫЙ ЛОКАТОР | 1977 |
|
SU1840483A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2291558C2 |
| СПОСОБ СКАНИРУЮЩЕЙ ДИЛАТОМЕТРИИ И ДИЛАТОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2735489C1 |
| Способ имитации радиолокационных отражений от протяженных целей | 2022 |
|
RU2815439C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ ОБ АМПЛИТУДЕ И ФАЗЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ | 1997 |
|
RU2182385C2 |
| АДАПТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА ФОКУСИРОВКИ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ НА ПРОТЯЖЕННОМ ОБЪЕКТЕ | 1991 |
|
RU2020521C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2485716C2 |
| Способ оптического зондирования объектов в атмосфере | 1986 |
|
SU1382219A1 |
| ГЛОБАЛЬНАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2024 |
|
RU2833299C1 |
Изобретение относится к измерительной технике и предназначено для бесконтактного прецизионного измерения скорости вращения объектов с диффузно-отражающей поверхностью, например валов технологических установок. Целью изобретения является повышение точности измерения угловой скорости исследуемого объекта. Участок поверхности вращающегося отражающего объекта 4 освещают лучом когерентного источника 3, при этом угол падения луча α≠0. Диффузно отраженное излучение пространственно фиксируют в плоскости приемной апертуры А, выделяя излучение в точках 1 и 2, смещенных друг относительно друга в направлении смещения участка освещения поверхности. Выделенное излучение оптически смешивают с опорным излучением источника и проводят преобразование оптических сигналов смешения в электрические фотоприемниками 5,6. Формируют взаимно корреляционную функцию электрических сигналов R12(R) , изменяя при этом фазу одного из сигналов до значения, при котором центральный максимум R(R) достигает максимального значения, а побочные максимумы, расположенные симметрично относительно главного, равны между собой. Измеряют временное положение τ о центрального максимума и вычисляют угловую скорость Ω по формуле Ω=А/22RτO, где а - расстояние между точками приема 1 и 2 в плоскости приемной апертуры
R - расстояние от плоскости апертуры до оси вращения объекта, параллельной плоскости апертуры. 3 ил.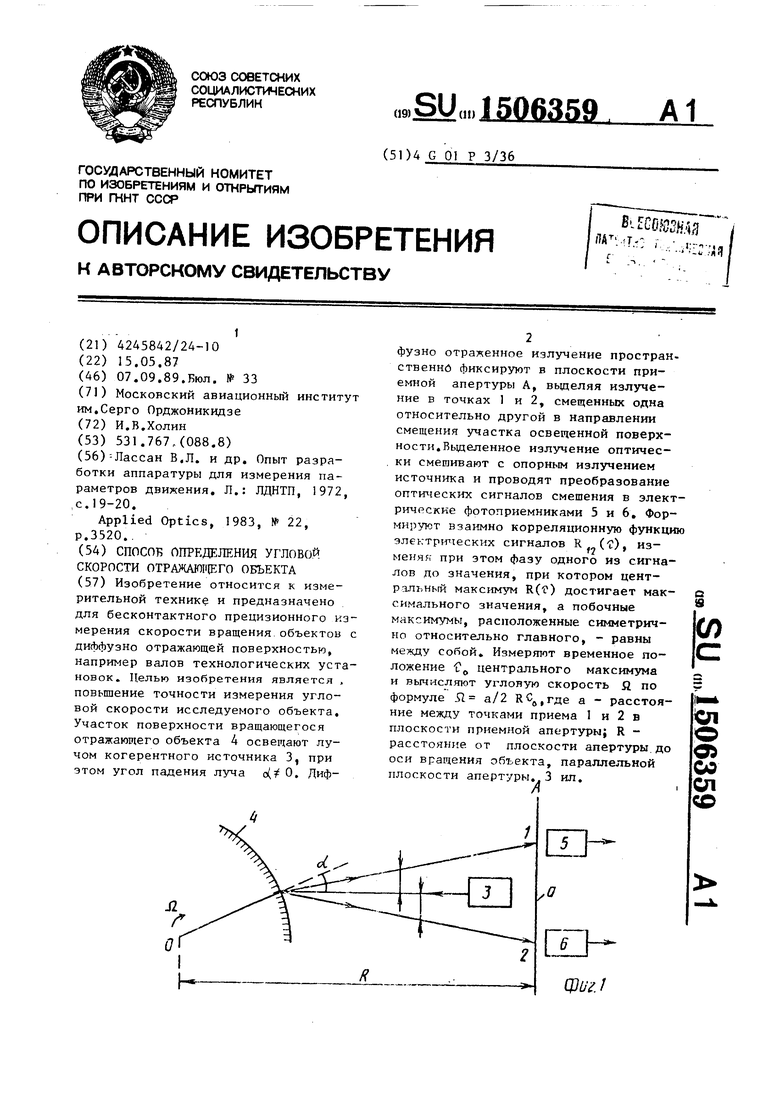
Фа.З
| :Лассан В,Л | |||
| и др | |||
| Опыт разработки аппаратуры для измерения параметров движения | |||
| Л.: ЛДНТП, 1972, ,с.19-20 | |||
| Applied Optics, 1983, № 22, p.3520.. |
