Известны спусковые механизмы электромагнитного и механического типа. Однако в таких механизмах пе применяется магнитострикционный материал.
Предлагаемый механизм отличается от известных тем, что он выполнен в виде стержня из магнитострикцио«ного материала, на котором размещена катушка управления, зажатого между двумя щеткамизахватами и связанного с исполнительным механизмом.
Такое выполнение механизма обеспечивает дистанционное управление с большим быстродействием.
Кроме того, спусковой механизм снабжен диском с обмоткой, служащим втулкой, внутри которой размещен вал, сопряженный с диском с натягом.
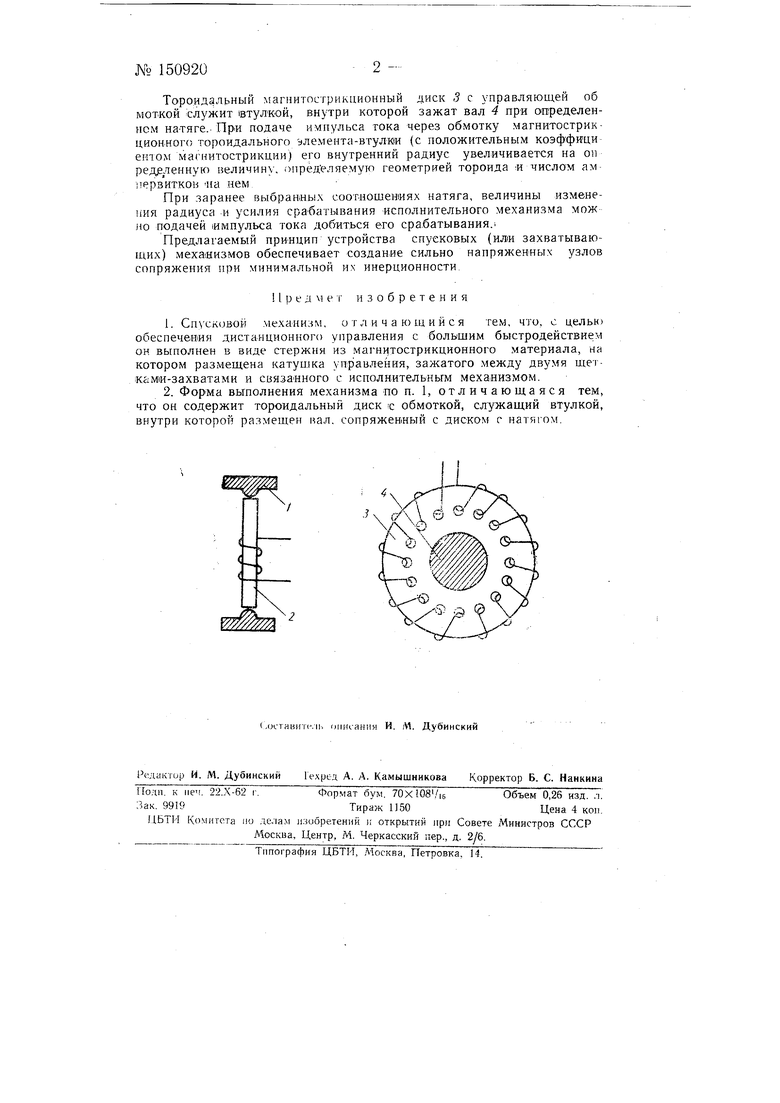
На чертеже изображены две конструктивные схемы предлагаемого механизма.
Между двумя щечками-захватами / зажат с определенным усилием (соответственно при определенной деформации) стержень 2 из магннтострикционного материала (с отрицательным коэффициентом магнитострикции) с обмоткой, которая питается управляющим током. При подаче импульса тока, рассчитанного на получение в стержне 2 магнитной индукции (т. е. ампервитков), достаточной для уменьшения длины стержня на некоторую величину Д/, узел сопряжения системы щечки- стержень 2 ослабляется до состояния, необходимого для срабатывания исполнительного механизма, т. е. усилие взаимодействия элементов, удерживающего узла уменьшается до величины, достаточной для перемещения исполнительным механизмом взаимодействующих, сопряженных элементов друг от друга (для срабатывания механизма/.
№ 1509202 Тороидальный магнитострикнионный диск 3 с управляющей об моткой служит втулкой, внутри которой зажат вал 4 при определенном натяге.Пр« подаче импульса тока через обмотку магнитострикционного тороидального элемента-втулки (с положительным коэффици еитом магнитострикции) его внутренний радиус увеличивается на он ределенную величину, определяемую геометрией тороида и числом ам
перзиткои -на нем
При заранее выбравныл соотношениях натяга, величины изменения радиуса и усилия сра батывания исполнительного механизма мож ло подачей «мпульса тока добиться его срабатывания.
Предлагаемый принцип устройства спусковых (илм захватывающих) механизмов обеспечивает создание сильно напряженных узлов сопряжения при минимальной их инерционности.
Предмет изобретения
1 Спусковой механизм, отличающийся тем. что, с целью обеспечения дистанционного управления с большим быстродействием он выполнен в виде стержня из магнитострикционного материала, на котором размещена катушка управления, зажатого между двумя щеткам1И-захватами и связанного с исполнительным механизмом.
2. Форма выполнения механизма по п. 1, отличающаяся тем, что он содержит тороидальный диск ю обмоткой, служащий втулкой, внутри которой размещен нал. сопряженный с диском с натягом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУСКОВОЙ МЕХАНИЗМ | 1968 |
|
SU208790A1 |
| Ультрамикрометр для линейных прецизионных измерений | 1960 |
|
SU139848A1 |
| СПУСКОВОЙ МЕХАНИЗМВПТ5^ндакслЕРти | 1969 |
|
SU236596A1 |
| Спусковой механизм | 1977 |
|
SU625268A2 |
| Максимальный расцепитель тока | 1983 |
|
SU1107190A1 |
| Спусковой механизм для автоматического выключения | 1975 |
|
SU560273A1 |
| Расцепитель максимального тока автоматического выключателя | 1977 |
|
SU658619A1 |
| Магнитострикционное устройство угловых перемещений | 1980 |
|
SU936767A1 |
| Спусковой механизм | 1974 |
|
SU542259A1 |
| Спусковой механизм | 1972 |
|
SU516120A1 |
