ел
сд
оо
4
ел
cpu.i
Изобретение относится к радиотехнике и может быть использовано в радиопередатчиках .
Целью изобретения является сокращение времени и повьгаение точности настройки и надежности.
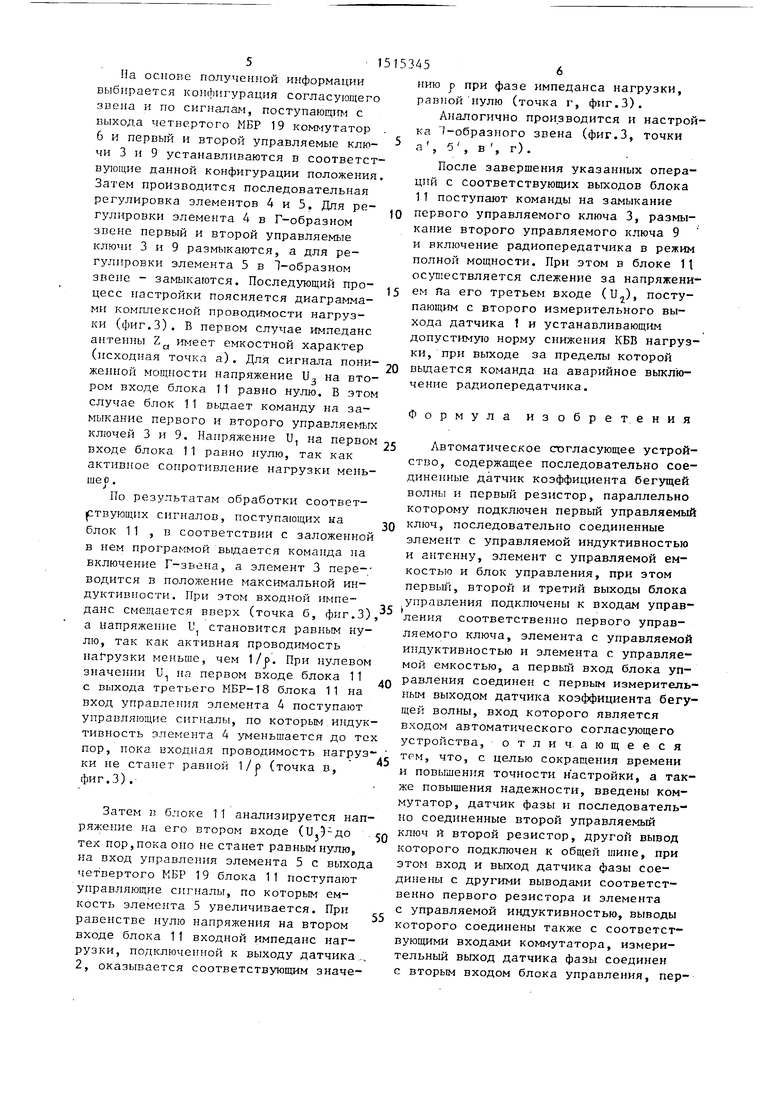
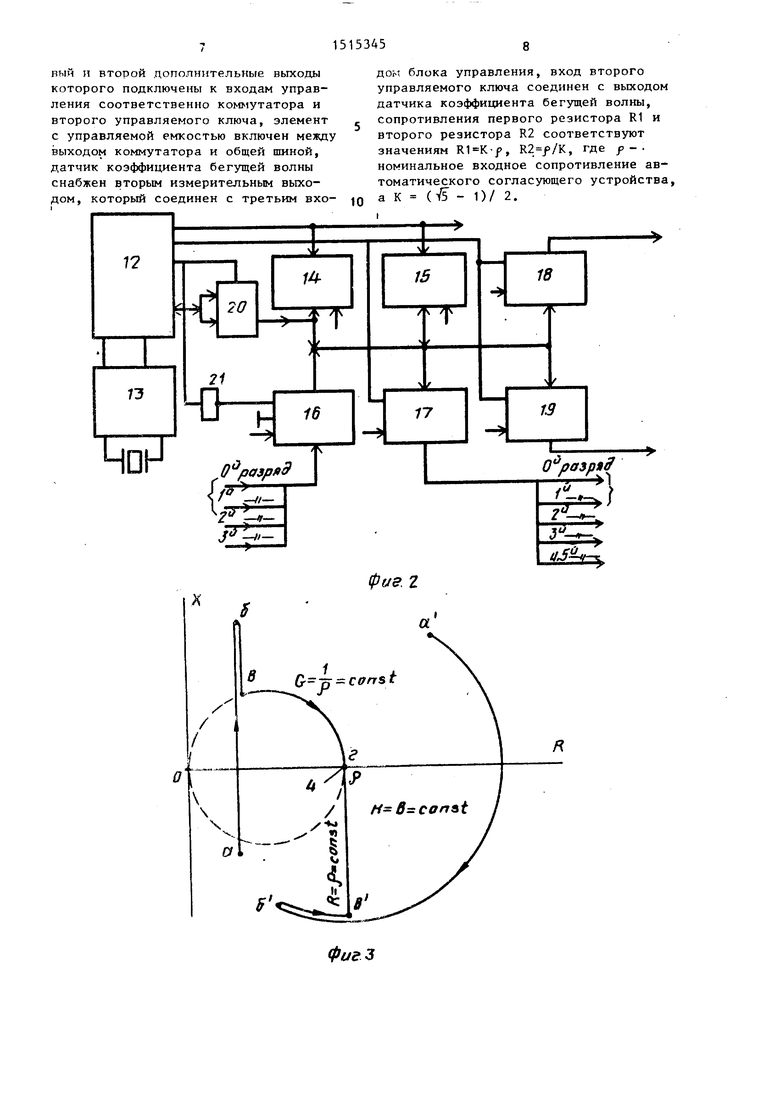
На фиг.1 приведена структурная электрическая схема автоматического согласующего устройства; на фиг.2 - пример выполнения блока управления автоматического согласующего устройства; на фиг.З - диаграммы комплексной проводимости для антенн с емко- стной и индуктивной составляющими нагрузок; на фиг.4 - пример вьтолне- ния датчика коэффициента бегущей волны.
Автоматическое согласующее устминимальной индуктивности и емкости соответственно.
Затем к возбудителю с выхода вто- г рого МБР 17 поступает управляющий сигнал, по которому радиопередатчик включается в режим пониженной мощнос ти. В блок 11 через первый МБР 16 поступают сигналы с измерительных 10 выходов датчиков 1 и 2, которые в не считываются и обрабатываются.
Сигналы, поступающие на блок 11 с измерительных выходов датчиков 1 и 2 должны соответствовать определенным 15 условиям, что достигается выполнением следующих требований при калибров ке датчиков 1 и 2.
Калибровка датчика 1 КБВ производится при помощи переменных резисторойство содержит датчик 1 коэффидиен-20 ров 28 и 29 так, чтобы переключение
та бегущей волны (КБВ), датчик 2 фаf
зы, первьш управляемый ключ 3, элевыходных напряжений датчика 1 на пер вом и третьем входах блока 11 в состояние логического нуля происходило на первом входе при coпpoтивJleниии 25 нагрузки, равном 2р/(-/5-1), на третьем входе - при сопротивлении нагрузки равном L J5 , где р - нo fинaль- ное входное сопротивление согласующе го устройства; L - требуемая величина КБВ на входе автоматического Согласующего устройства (например, 0,9). Таким образом, сигнал логической единицы появляется на первом входе блока 11 при КБВ нагрузки , а на третьем входе - при .
мент 4 с управляемой индуктивностью, элемент 5 с управляемой емкостью, коммутатор 6, антенну 7, первый резистор 8, второй управляемьш ключ 9, второй резистор 10 и блок 11 управления.
Блок 11 управления содержит микропроцессор 12, reiiepaTop 13 тактивых импульсов, постоянное запоминающее устройство 14, оперативное запоминающее устройство 15, первь Й 16, второй 17, третий 18 и четвертый 19 много- режимные буферные регистры (МБР), устройство 20 ввода и инвертор 21.
Датчик 1 КБВ содержит трансформатор 22 тока, емкостный делитель 23- напряжения, детекторные диоды 24 и 25, операционные усилители 26 и 27 и переменные резисторы 28 и 29 и выходы 30 и 31. Датчик КБВ имеет также блокировочные элементы и элементы связи.
Aвтo aтичecкoe согласующее устройство работает следующим образом.
По сигналам, поступающим от возбудителя радиопередатчика на блок 11 запускается заложенная в нем программа. В блоке 11 формируются сигналы управления, которые через второй МБР 17 поступают на входы управления первого и второго управляемых ключей
3и 9 и устанавливают их в разомкнутое положение. Сигналы с выходов третьего и четвертого МБР 18 и 19 поступают на входы управления элементов
4и 5 и устанавливают их в положение
153454
минимальной индуктивности и емкости соответственно.
Затем к возбудителю с выхода вто- г рого МБР 17 поступает управляющий сигнал, по которому радиопередатчик включается в режим пониженной мощности. В блок 11 через первый МБР 16 поступают сигналы с измерительных 10 выходов датчиков 1 и 2, которые в нем считываются и обрабатываются.
Сигналы, поступающие на блок 11 с измерительных выходов датчиков 1 и 2, должны соответствовать определенным 15 условиям, что достигается выполнением следующих требований при калибровке датчиков 1 и 2.
Калибровка датчика 1 КБВ производится при помощи переменных резисто0
5
выходных напряжений датчика 1 на первом и третьем входах блока 11 в состояние логического нуля происходило на первом входе при coпpoтивJleниии 5 нагрузки, равном 2р/(-/5-1), на третьем входе - при сопротивлении нагрузки равном L J5 , где р - нo fинaль- ное входное сопротивление согласующего устройства; L - требуемая величина КБВ на входе автоматического Согласующего устройства (например, 0,9). Таким образом, сигнал логической единицы появляется на первом входе блока 11 при КБВ нагрузки ,6, а на третьем входе - при .
Калибровка датчика 2 фазы производится так, чтобы переключение напряжения на входе блока 11 из состояния логической единицы в состояние логического нуля происходило при смене знака реактивности нагрузки с индуктивного на емкостной.
В работе предлагаемого устройства использованы те положения, что датчик 1 КБВ, нагруженный на последовательно соединенные резистор R1 и нагрузку (где р/( о-1), эквивалентен датчику активной.проводимости нагрузки, а датчик 1, нагруженный на параллельно соединенные резистор R2 и нагрузку (где (/5-1)/2 ), зкви- валентерг датчику активного сопротивления нагрузки.
Таким образом, при разомкнутых первом и втором управляемых ключах 3 и 9 датчик 1 выдает информацию обактивной проводимости нагрузки (элементы 4 и 5 и антенна 7), а при замкнутых - об ее активном сопротивлении.0
5
0
5
5
На основе полученной информации выбирается конфигурация согласующег звена и по сигналам, поступающим с выхода четвертого МБР 19 коммутатор 6 и первый и второй управляемые ключи 3 и 9 устанавливаются в соответсвующие данной конфигурации положения Затем производится последовательная регулировка элементов 4 и 5. Для регулировки элемента 4 в Г-образном звене первый и второй управляемые ключи 3 и 9 размыкаются, а для регулировки элемента 5 в 1-образном звене - замыкаются. Последующий процесс настройки поясняется диаграммами комплексной проводимости нагрузки (фиг.З). В первом случае импеданс антенны Z емкостной характер (исходная точка а). Для сигнала пони
20
женной мощности напряжение U на втором входе блока 11 равно нулю. В этом случае блок 11 выдает команду на замыкание первого и второго управляемых ключей 3 и 9. Напряжение U, на первом jr входе блока 11 равно пулю, так как активное сопротивление нагрузки меньшее .
По результатам обработки соответ- ртвующих сигналов, поступающих на блок 11 , в соответствии с заложенной в нем программой выдается команда на включение Г-звена, а элемент 3 пере-- водится в положение максимальной индуктивности. При этом входной импеПосле завершения указанных операций с соответствующих выходов блока 11 поступают команды на замыкание первого управляемого ключа 3, размыкание второго управляемого ключа 9 и включение радиопередатчика в режим полной мощности. При этом в блоке 11 ос т1 ествляется слежение за напряжением Яа его третьем входе (U), поступающим с второго измерительного выхода датчика 1 и устанавливающим допустимую норму снижения КБВ нагрузки, при выходе за пределы которой вьщается команда на аварийное выключение радиопередатчика.
Формула изобретения
Автоматическое согласующее устройство, содержащее последовательно соединенные датчик коэффициента бегущей волны и первый резистор, параллельно которому подключен первый управляемый 30 ключ, последовательно соединенные элемент с управляемой индуктивностью и антенну, элемент с управляемой емкостью и блок управления, при этом первый, второй и третий выходы блока управления подключены к входам управ
дане смещается вверх (точка б, фиг.З), ления соответственно первого управа напряжение U становится равным ну- ляемого ключа, элемента с управляемой лю, так как активная проводимость нa pyзки меньше, чем 1/р. При нулевом
значении U на первом входе блока 11 с выхода третьего МБР-18 блока 11 на вход управления элемента 4 поступают управляющие сигналы, по которым,индуктивность элемента 4 меньшается до тех
индуктивностью и элемента с управляемой емкостью, а первьй вход блока уплп равления соединен с первым измерительным выходом датчика коэффициента бегущей волны, вход которого является входом автоматического согласующего устройства, отличающееся тем, что, с целью сокращения времени и повышения точности настройки, а также повышения надежности, введены коммутатор, датчик фазы и последовательно соединенные второй управляемый ключ и второй резистор, другой вывод которого подключен к общей шине, при этом вход и выход датчика фазы соединены с другими выводами соответственно первого резистора и элемента с управляемой индуктивностью, выводы которого соединены также с соответствующими входами коммутатора, измерительный выход датчика фазы соединен с вторым входом блока управления, перпор, пока входная проводимость нагрузки не станет равной 1/р (точка в, фиг.З) .Затем в блоке 11 анализируется напряжение на его втором входе (и, гл тех пор, пока опо не станет равным нулю, на вход управления элемента 5 с выхода чет вертого МБР 19 блока 11 поступают управляющие сигналы, по которым емкость элемента 5 увеличивается. При равенстве нулю напряжения на втором входе блока 11 входной импеданс нагрузки, подключенргой к выходу датчика... 2, оказывается соответствующим значелп
55
нито р при фазе импеданса нагрузки, равной нулю (точка г, фиг.З).
Аналогично производится и настройка 1-образпого звена (фиг.З, точки а , 5, в , г).
После завершения указанных операций с соответствующих выходов блока 11 поступают команды на замыкание первого управляемого ключа 3, размыкание второго управляемого ключа 9 и включение радиопередатчика в режим полной мощности. При этом в блоке 11 ос т1 ествляется слежение за напряжением Яа его третьем входе (U), поступающим с второго измерительного выхода датчика 1 и устанавливающим допустимую норму снижения КБВ нагрузки, при выходе за пределы которой вьщается команда на аварийное выключение радиопередатчика.
Формула изобретения
Автоматическое согласующее устройство, содержащее последовательно соединенные датчик коэффициента бегущей волны и первый резистор, параллельно которому подключен первый управляемый ключ, последовательно соединенные элемент с управляемой индуктивностью и антенну, элемент с управляемой емкостью и блок управления, при этом первый, второй и третий выходы блока управления подключены к входам управ
ляемого ключа, элемента с управляемой
индуктивностью и элемента с управляемой емкостью, а первьй вход блока уп5
гл
лп равления соединен с первым измерительным выходом датчика коэффициента бегущей волны, вход которого является входом автоматического согласующего устройства, отличающееся тем, что, с целью сокращения времени и повышения точности настройки, а также повышения надежности, введены коммутатор, датчик фазы и последовательно соединенные второй управляемый ключ и второй резистор, другой вывод которого подключен к общей шине, при этом вход и выход датчика фазы соединены с другими выводами соответственно первого резистора и элемента с управляемой индуктивностью, выводы которого соединены также с соответствующими входами коммутатора, измерительный выход датчика фазы соединен с вторым входом блока управления, пер5
вый и второй дополнительные выходы которого подключены к входам управления соответственно коммутатора и второго управляемого ключа, элемент с управляемой емкостью включен между выходом коммутатора и общей шиной, датчик коэффициента бегущей волны снабжен вторым измерительным выходом, который соединен с третьим вхо
доьт блока управления, вход второго управляемого ключа соединен с выходом датчика коэффициента бегущей волны, сопротивления первого резистора R1 и второго резистора R2 соответствуют значениям , , где р-- номинальное входное сопротивление автоматического согласующего устройства, а К ( - О/ 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННО-СОГЛАСУЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2309491C1 |
| АНТЕННО-СОГЛАСУЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2308145C2 |
| СОГЛАСУЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО ДМКВ ДИАПАЗОНА ДЛЯ СИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2018 |
|
RU2694136C1 |
| УСТРОЙСТВО И СПОСОБ СОГЛАСОВАНИЯ РАДИОПЕРЕДАЮЩЕГО АНТЕННО-ФИДЕРНОГО ТРАКТА С АНТЕННАМИ РАЗЛИЧНЫХ ТИПОВ | 2023 |
|
RU2800642C1 |
| Устройство согласования радиопередатчика с антенной | 1977 |
|
SU769708A2 |
| РАДИОМАЯК | 1992 |
|
RU2013783C1 |
| АНТЕННОЕ СОГЛАСУЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2698507C1 |
| Автоматическое устройство согласования радиопередатчика с антенной | 1987 |
|
SU1566465A1 |
| Устройство для автоматического согласования импедансов в приемнопередающих станциях | 1967 |
|
SU306793A1 |
| ПЕРЕДАЮЩИЙ ТРАКТ КВ-ДИАПАЗОНА С АНТЕННЫМ СОГЛАСУЮЩИМ УСТРОЙСТВОМ | 2022 |
|
RU2792220C1 |
Изобретение относится к радиотехнике и может быть использовано в радиопередатчиках. Цель изобретения - сокращение времени и повышение точности настройки, а также повышение надежности. Устройство содержит датчик 1 коэффициента бегущей волны (КБВ), управляемый ключ 3, элемент 4 с управляемой индуктивностью, элемент 5 с управляемой емкостью, антенну 7, резистор 8 и блок 11 управления. Для достижения поставленной цели в устройство введены датчик 2 фазы, коммутатор 6, управляемый ключ 9 и резистор 10. При разомкнутых ключах 3 и 9 датчик 1 выдает информацию об активной проводимости нагрузки, а при замкнутых - об ее активном сопротивлении. В блоке 11 осуществляется слежение за напряжением на его третьем входе, устанавливающим допустимую норму снижения КБВ нагрузки, при выходе за пределы которой выдается команда на аварийное выключение радиопередатчика. 4 ил.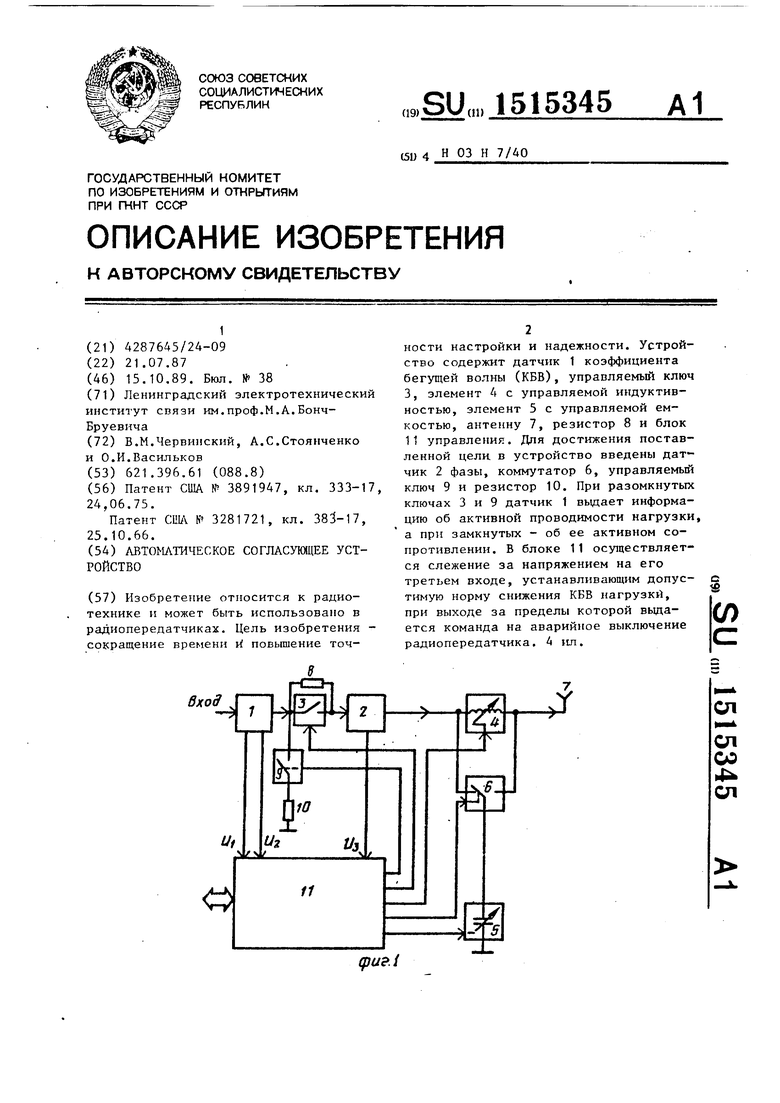
7
20
/Д
73
2
-о
г«
r L
v
f3
О разряЭ
7 1-73,S
G- p-cffrrst
О
/
/
X
ФигЗ
15
18
/
f
17
13
о разр
i.
фиг. 2
aS
i
а
L±J
л:::ги
/5
ч
HhiHh
фиг.4
| Патент США № 3891947, кл | |||
| Телефонная трансляция с катодными лампами | 1922 |
|
SU333A1 |
| Патент № 3281721, кл | |||
| Передвижная комнатная печь | 1922 |
|
SU383A1 |
