VN I
/Ь /V - VV ../IV
// / ; Y уф / V,// V Л л д /) //
jM yV / К,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ неразрушающего контроля механических свойств ферромагнитных материалов | 1980 |
|
SU896569A1 |
| Газоанализатор | 1978 |
|
SU1239584A2 |
| Газоанализатор | 1977 |
|
SU1157444A1 |
| МНОГОЧАСТОТНОЕ ПРИЕМОИЗЛУЧАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО | 2018 |
|
RU2700031C1 |
| Устройство для градуировки измерительных преобразователей переменного давления | 1985 |
|
SU1280353A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ АКУСТИЧЕСКИХ СИГНАЛОВ | 1991 |
|
RU2020473C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2768528C1 |
| Пьезоэлектрический трансформатор | 1979 |
|
SU851787A1 |
| Газоанализатор | 1979 |
|
SU1132211A1 |
| Способ измерения концентрации парамагнитного компонента в газовой среде | 1979 |
|
SU1126858A1 |
Изобретение относится к измерительной технике. Датчик линейных перемещений содержит закрепленный на корпусе стержневой пьезоэлемент 2 с нанесенными на его двух боковых поверхностях низкоомными токопроводящими покрытиями, из которых одно разделено на гальванически изолированные секции 4,5 и 6. Секция 4 выполнена из ферромагнитного материала и дискретно намагничена по длине на участках 7, представляющих элементарные постоянные магниты. Покрытие 3 и секция 4 подключены к выходу генератора 8 напряжения постоянного тока, управляемого по чатсоте. Частота генератора 8 выбирается такой, чтобы в пьезоэлементе 2 устанавливалась стоячая ультразвуковая волна, пучности которой располагались бы на участках 7. При перемещении индикатора вдоль поверхности пьезоэлемента 2 на его выходе периодически появляются пачки импульсов, которые пересчитываются и регистрируются. Для коррекции температурной погрешности секции 5 и 6 подключены к входам дифференциального усилителя 9, выход которого соединен с управляющим входом генератора 8. При нормальной температуре величины напряжений на секциях 5 и 6, размещенных на таком же расстоянии одна от другой, как и участки 7, будут практически одинаковыми, а потому сигнал на выходе усилителя 9 будет равным нулю. При изменении температуры окружающей среды скорость распространения волны в пьезоэлементе 2 изменится, а потому напряжения на секция 5 и 6 также станут различными. На выходе усилителя 9 появится корректирующий сигнал, который поступит на управляющий вход генератора 8, изменяя его частоту до тех пор, пока пучности стоячей ультразвуковой волны снова не разместятся в секциях 5 и 6. Таким образом, температурная погрешность измерения будет скорректирована. 4 ил.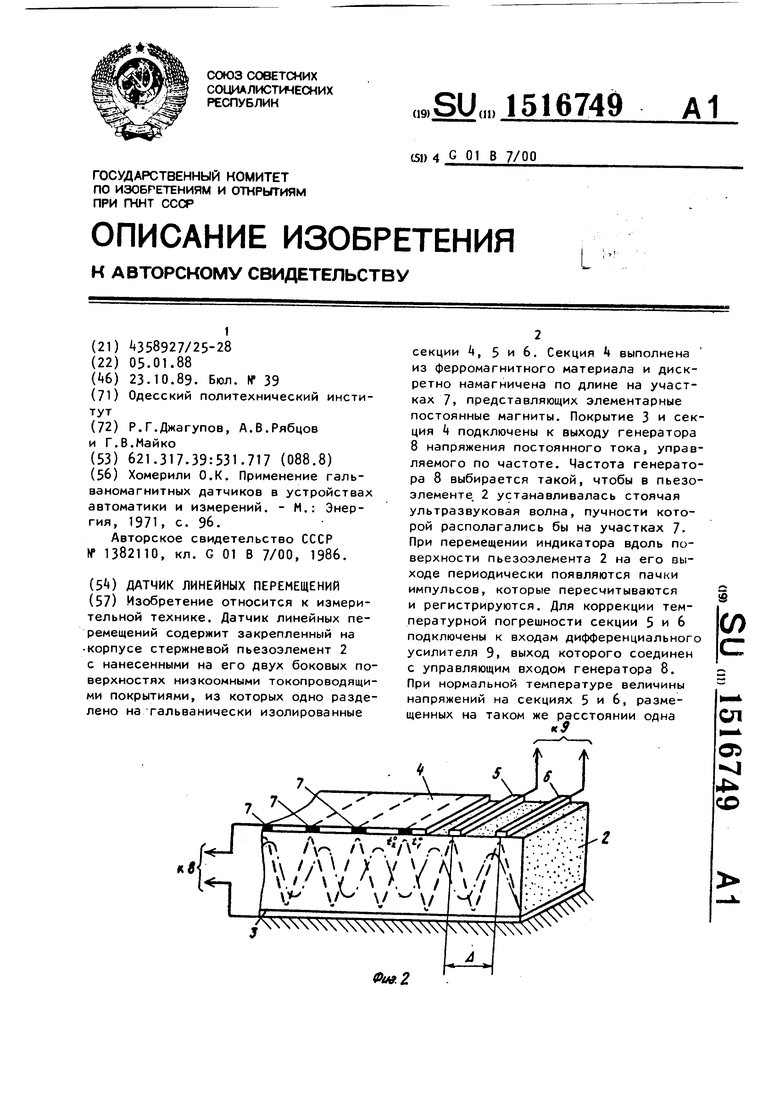
к
3
от другой, как и участки 7, будут практически одинаковыми, а потому сигнал на выходе усилителя 9 будет равным нулю. При изменении температуры окружающей среды скорость распространения волны в пьезоэлементе 2 изменится, а потому напряжения на секциях 5 и 6 также станут различными. На выходе усилителя 9 появится
Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений объектов.
Цель изобретения - повышение точности за счет цифровой формы представления выходного сигнала и коррекции температурной погрешности.
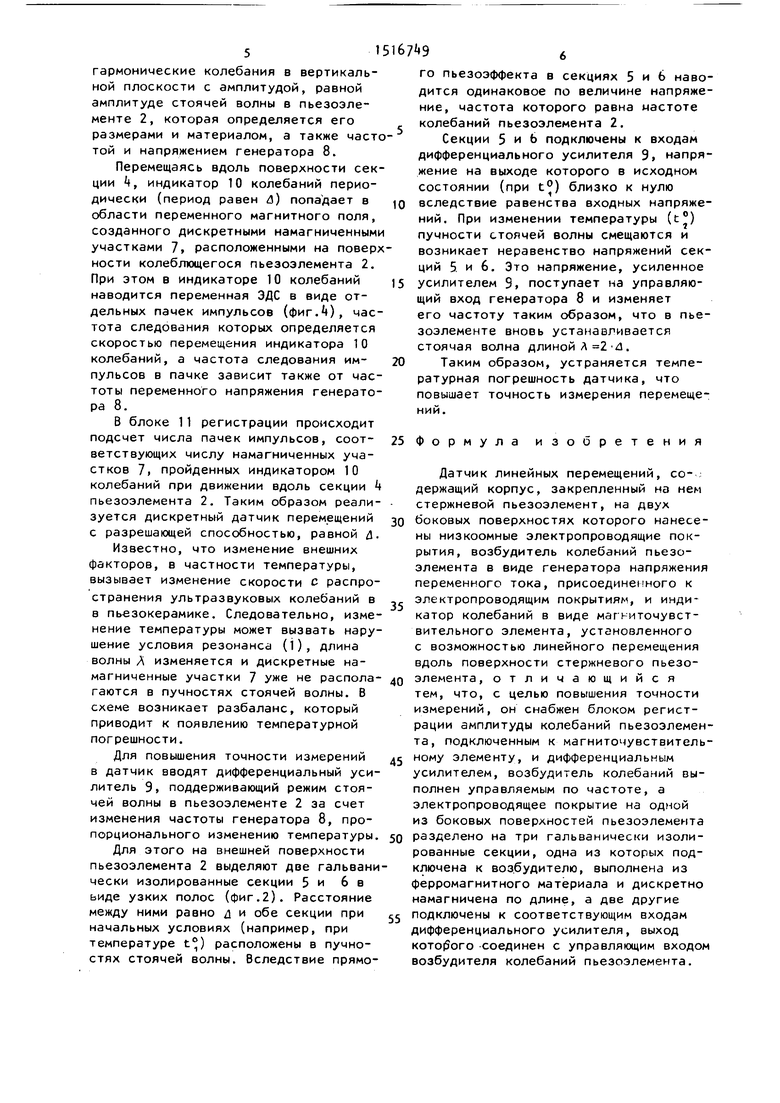
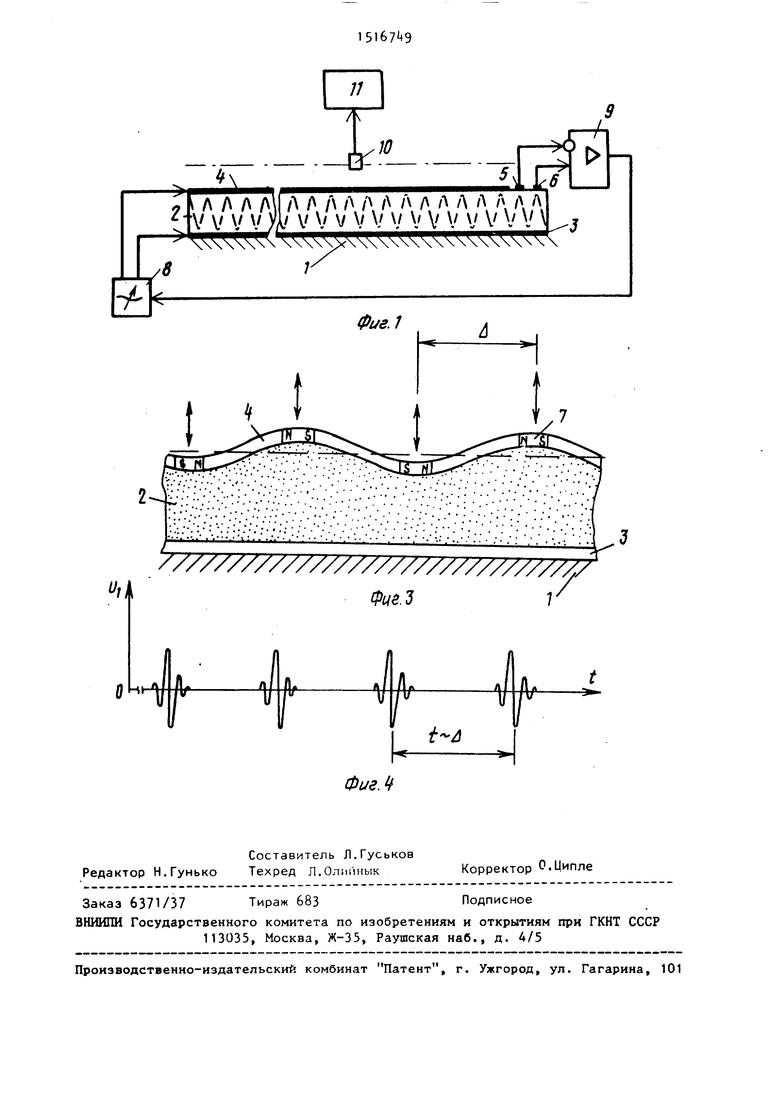
На фиг.1 представлена функциональная схема датчика линейных перемещений; на фиг.2 - конструкция пьезоэле- мента; на фиг.З характер колебаний участков электропроводящего ферромагнитного покрытия, дискретно намагниченного по длине; на фиг. - диаграммы напряжения на выходе индикатора колебаний.
Датчик линейных перемещений содержит корпус 1 и закрепленный на нем стержневой пьезоэлемент 2. На двух боковых поверхностях пьезоэлемента 2 нанесены низкоомные токопроводящие покрытия: на одной поверхности покрытие 3 а на другой - покрытие, разделенное на три гальванически изолированные секции Ц, 5 и 6, из которых Секция 4 выполнена из ферромагнитного материала и дискретно намагничена по длине на участках 7, отстоящих один от другого на одинаковых расстояниях Л. Расстояние между секциями 5 и 6 также равно Л. К покрытию 3 и секции k подключен возбудитель колебаний пьезоэлемента 2, выполненный в виде генератора 8 напряжения переменного тока, управляемого по частоте. Секции 5 и 6 подключены к входам дифференциального усилителя 9, выход которого соединен с управляющим входом генератора 8. Над пьезоэлементом 2 с возмож ностью перемещения вдоль его поверхности установлен индикатор 10 колебаний в виде магниточувствительного элемента, подключенного к блоку 11
корректирующий сигнал, который поступит на управляющий вход генератора 8, изменяя его частоту до тех пор, пока пучности стоячей ультразвуковой волны
снова не разместятся в секциях 5 и 6. Таким образом, температурная погрешность измерения будет скорректирована. 4 ил.
0
5
регистрации амплитуды колебаний пьезоэлемента 2.
Датчик линейных перемещений работает следующим образом.
Под действием переменного напряжения генератора 8 вследствие обратного пьезоэлектрического эффекта в пьезоэлементе 2 возбуждаются упругие поперечные колебания. Частота f генератора 8 выбирается таким образом, что в пьезоэлементе 2 устанавливается стоячая ультразвуковая волна. Это выполняется при условии
30
SJ.D
(1)
где с - скорость распространения колебаний в пьезокерамике; 1 - длина пьезоэлемента; п - мода колебаний (число полупериодов стоячей волны). При этом длина волны установившихся колебаний
0
5
0
5
-f
2-а.
(2)
На поверхности секции k покрытия, выполненного из ферромагнитного материала (например, никеля, кобальта, железа и т.п.), предварительно созданы дискретные намагниченные участки 7, которые можно представить в виде элементарных постоянных магнитов, линейные размеры которых определяются параметрами записывающего устройства, например шириной рабочего зазора записывающей магнитной головки (обычно 1-3 мкм).
Расстояние между дискретными намагниченными участками равно и, и при этом каждый из них расположен в пучности стоячей волны, установившейся в пьезоэлементе 2.
Таким образом, каждый из элементарных постоянных магнитов 7 совершает
гармонические колебания в вертикальной плоскости с амплитудой, равной амплитуде стоячей волны в пьезоэле- менте 2, которая определяется его размерами и материалом, а также частотой и напряжением генератора 8.
Перемещаясь вдоль поверхности секции t, индикатор 10 колебаний периодически (период равен и) попадает в области переменного магнитного поля, созданного дискретными намагниченными участками 7, расположенными на поверхности колеблющегося пьезоэлемента 2. При этом в индикаторе 10 колебаний наводится переменная ЭДС в виде отдельных пачек импульсов (фиг.), частота следования которых определяется скоростью перемещения индикатора 10 колебаний, а частота следования импульсов в пачке зависит также от частоты переменного напряжения генератора 8.
В блоке 11 регистрации происходит подсчет числа пачек импульсов, соответствующих числу намагниченных участков 7, пройденных индикатором 10 колебаний при движении вдоль секции k пьезоэлемента 2. Таким образом реализуется дискретный датчик перемещений с разрешающей способностью, равной Л.
Известно, что изменение внешних факторов, в частности температуры, вызывает изменение скорости с распространения ультразвуковых колебаний в в пьезокерамике. Следовательно, изменение температуры может вызвать нарушение условия резонанса (1), длина волны Л изменяется и дискретные намагниченные участки 7 уже не располагаются в пучностях стоячей волны. В схеме возникает разбаланс, который приводит к появлению температурной погрешности.
Для повышения точности измерений в датчик вводят дифференциальный усилитель 9, поддерживающий режим стоячей волны в пьезоэлементе 2 за счет изменения частоты генератора 8, пропорционального изменению температуры.
Для этого на внешней поверхности пьезоэлемента 2 выделяют две гальванически изолированные секции 5 и 6 в ьиде узких полос (фиг.2). Расстояние между ними равно л и обе секции при начальных условиях (например, при температуре t J) расположены в пучностях стоячей волны. Вследствие прямого пьезоэффекта в секциях 5 и 6 наводится одинаковое по величине напряжение, частота которого равна частоте колебаний пьезоэлемента 2.
Секции 5 и Ь подключены к входам дифференциального усилителя 9, напряжение на выходе которого в исходном состоянии (при t) близко к нулю
Q вследствие равенства входных напряжений. При изменении температуры (t) пучности стоячей волны смещаются и возникает неравенство напряжений секций 5. и 6. Это напряжение, усиленное
5 усилителем 9 поступает на управляющий вход генератора 8 и изменяет его частоту таким образом, что в пьезоэлементе вновь устанавливается стоячая волна длиной .
0 Таким образом, устраняется температурная погрешность датчика, что повышает точность измерения перемещений.
5 Формула изобретения
Датчик линейных перемещений, со- : держащий корпус, закрепленный на нем стержневой пьезоэлемент, на двух
0 боковых поверхностях которого нанесены низкоомные электропроводящие покрытия, возбудитель колебаний пьезоэлемента в виде генератора напряжения переменного тока, присоединенного к электропроводящим покрытиям, и индикатор колебаний в виде магниточувст- вительного элемента, установленного с возможностью линейного перемещения вдоль поверхности стержневого пьезоэлемента, отличающийся тем, что, с целью повышения точности измерений, он снабжен блоком регистрации амплитуды колебаний пьезоэлемента, подключенным к магниточувствитель5 ному элементу, и дифференциальным
усилителем, возбудитель колебаний выполнен управляемым по частоте, а электропроводящее покрытие на одной из боковых поверхностей пьезоэлемента
0 разделено на три гальванически изолированные секции, одна из которых под- к возбудителю, выполнена из ферромагнитного материала и дискретно намагничена по длине, а две другие
5 подключены к соответствующим входам дифференциального усилителя, выход кото|5ого -соединен с управляющим входом возбудителя колебаний пьезоэлемента.
5
0
1
гл л л л л А л л л л л л л л л л л
V V УУУА./ V V V V V V V V V V V V V
////////////////////////////
г
