сосуд 8 с контролируемым нефтепродуктом в резервуаре, выходы чувствительных элементов соединены с рыга- гом 9, с которым соединены также преобразователь 12 усилия в давление, устройство 13 термокомпенсации, которые выходами подключены к узкопредельному измерителю 14 давления, в свою очередь -подключенного к блоку 15 управления и блоку 18 отображения информации. Блок 17 установки грузов 19 на рычаг 9 подключен к блоку управления. С чувствительных элементов 1 и 5 сигналы, преобразованные в усилия, передаются на рычаг 9. С выхода г широкопредельного измерителя 16 поступает сигнал в блок 15 управления, который выдает команду на установку 17 компенсирующих грузов. Сигнал недокомпенсации выдается через дат- 0 ччк 1А в блок управления, после чего производится окончательная компенсация. 3 з.п. ф-лы, 8 ил.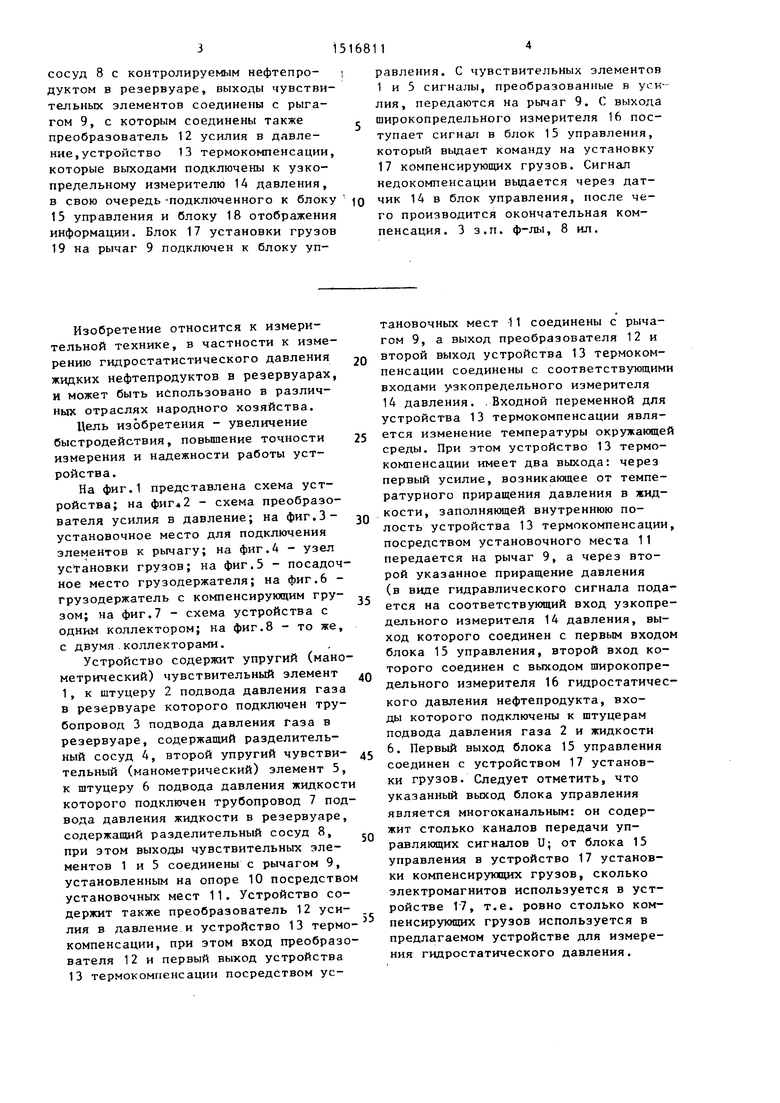
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения гидростатического давления жидкостей в резервуарах | 1988 |
|
SU1578541A1 |
| Устройство для определения массы отпущенного нефтепродукта | 1988 |
|
SU1597588A1 |
| Плотномер | 1980 |
|
SU911220A1 |
| Устройство для определения массы отпущенного нефтепродукта | 1989 |
|
SU1714379A2 |
| Устройство для определения концентрации растворенного вещества | 1990 |
|
SU1793363A1 |
| Устройство для испытания сооружений | 1986 |
|
SU1399399A1 |
| Вискозиметр | 1983 |
|
SU1151860A1 |
| Способ измерения массы жидкости в резервуарах и устройство для его осуществления | 1988 |
|
SU1657975A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕБИТА НЕФТЯНЫХ СКВАЖИН | 2008 |
|
RU2382195C1 |
| Способ определения массы нефтепродукта в резервуаре и устройство для его осуществления | 1987 |
|
SU1520352A1 |
Изобретение относится к измерительной технике, в частности к измерению гидростатического давления жидких нефтепродуктов в резервуарах. Цель изобретения - повышение быстродействия, точности и надежности. Устройство содержит упругий чувствительный элемент 1, вход которого сообщен через разделительный сосуд 3 с газовоздушным пространством резервуара, дополнительный чувствительный элемент 4, вход которого соединен через разделительный сосуд 6 с контролируемым нефтепродуктом в резервуаре, выходы чувствительных элементов соединены с рычагом 7, с которым соединены также преобразователь усилия в давление 10, устройство термокомпенсации 11, которые выходами подключены к узкопредельному измерителю давления 12, в свою очередь подключенного к блоку управления 13 и блоку отображения информации 16. Блок 15 установки грузов 24 на рычаг 7 подключен к блоку управления. С чувствительных элементов 1 и 4 сигналы, преобразованные в усилия, передаются на рычаг 7. С выхода широкопредельного измерителя 14 поступает сигнал в блок управления 13, который выдает команду на установку компенсирующих грузов 17. Сигнал недокомпенсации выдается через датчик 12 в блок управления, после чего производится окончательная компенсация. 3 з.п.ф., 13 ил.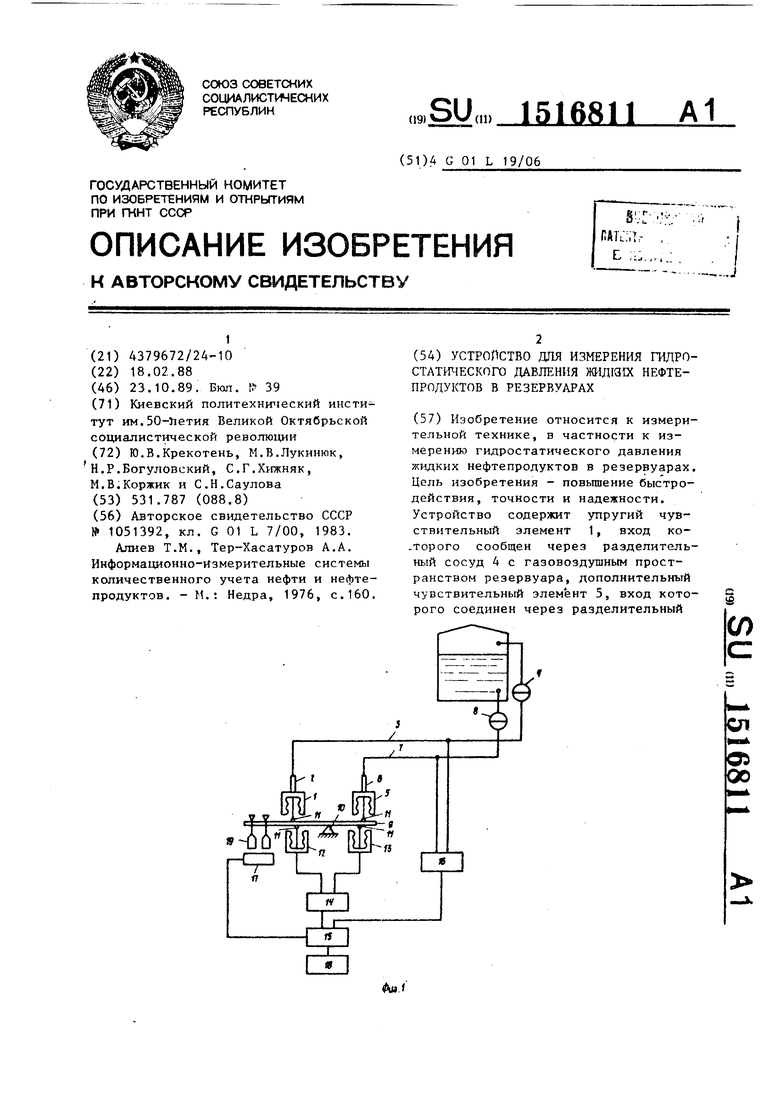
Изобретение относится к измерительной технике, в частности к измерению гидростатистического давления жидких нефтепродуктов в резервуарах, и может быть использовано в различных отраслях народного хозяйства. Цель изобретения - увеличение быстродействия, повьппение точности измерения и надежности работы устройства.
На фиг.1 представлена схема устройства; на - схема преобразователя усилия в давление; на фиг.3- установочное место для подключения элементов к рычагу; на фиг.А - узел установки грузов; на фиг.5 - посадочное место грузодержателя; на фиг.6 - грузодержатель с компенсирующим гру- зом; на фиг.7 - схема устройства с одним коллектором; на фиг.8 - то же, с двумя.коллекторами.
Устройство содержит упругий (манометрический) чувствительный элемент 1, к штуцеру 2 подвода давления газа в резервуаре которого подключен трубопровод 3 подвода давления Газа в резервуаре, содержащий разделительный сосуд А, второй упругий чувстви- тельный (манометрический) элемент 5, к штуцеру 6 подвода давления жидкост которого подключен трубопровод 7 подвода давления жидкости в резервуаре, содержащий разделительный сосуд 8, при этом выходы чувствительных элементов 1 и 5 соединены с рычагом 9, установленным на опоре 10 посредство установочных мест 11. Устройство содержит также преобразователь 12 усилия в давление.и устройство 13 термокомпенсации, при этом вход преобразователя 12 и первый выход устройства 13 термокомпенсации посредством ус
,
5 п
5
тановочных мест 11 соединены с рычагом 9, а выход преобразователя 12 и второй выход устройства 13 термоком- пенсации соединены с соответствующими входами узкопредельного измерителя 1А давления. .Входной переменной для устройства 13 термокомпенсации является изменение температуры окружающей среды. При этом устройство 13 термокомпенсации имеет два выхода: через первый усилие, возникаклцее от температурного приращения давления в жидкости, заполняющей внутреннюю полость устройства 13 термокомпенсации, посредством установочного места 11 передается на рычаг 9, а через второй указанное приращение давления (в виде гидравлического сигнала подается на соответствующий вход узкопредельного измерителя 1А давления, выход которого соединен с первым входом блока 15 управления, второй вход которого соединен с выходом широкопредельного измерителя 16 гидростатического давления нефтепродукта, входы которого подключены к штуцерам подвода давления газа 2 и жидкости 6. Первый выход блока 15 управления соединен с устройством 17 установки грузов. Следует отметить, что указанный выход блока управления является многоканальным: он содержит столько каналов передачи управляющих сигналов U; от блока 15 управления в устройство 17 установки компенсирующих грузов, сколько электромагнитов используется в устройстве 17, т.е. ровно столько компенсирующих грузов используется в предлагаемом устройстве для измерения гидростатического давления.
51
Но поскольку количество грузов (и электромагнитов) для каждого конкретного случая использования предлагаемого устройства может быть разным (в зависимости от требуемой дискретности компенсации и верхнего предела измерения) и невозможно заранее оговорить, сколько каналов передачи управляющих сигналов U; потрс- буетс, то все они объединены как первый выход блока 15 управления. Второй выход блока 15 управления соединен с узлом 18 отображения информации. Грузы 19 установлены на рычаге 9. Массы т„ грузов 19 и длина их плеч Ь„ установки на рычаге 9 удовлетворяют соотношенрпо
„ aS
P.
(1)
где n 1,2... - номер компенсирующего груза;
а, S - длина плеча и эффективная площадь преобразователя усилия в давление;
g - ускорение свободного падения;
Р, - компенсирующее давление, возникающее на выходе преобразователя 12 при установке на рычаг 9 п-го компенсирующего груза.
Устройство работает следующим образом.
После соответствующего подключения трубопроводов 3 и 7 на чувствительный элемент 1 поступает гидравлический сигнал (трубопроводы 3 и 7 после разделительных сосудов заполнены разделительной жидкостью), равный давлению в газовоздушном пространстве над поверхностью жидкости в резервуаре Р,, а на второй чувствительный элемент 5 - сигнал, равный сумме 7. и гидростатического давления Pf. столба жидкости, находящейся в резервуаре, т.е. . С выходов чувствительных элементов 1 и 5 сигналы Ру и P|j+P , преобразованные в усилия, передаются через установочные места 11 на рычаг 9 механического сумматора. С выхода широкопредельного измерителя 16 измеренное (грубо) значение P(Pr) поступает в блок 15 управления, которьоч формирует коП
манду на установку соответствующих компенсирующих грузов 19. При установке на рычаг 9 компенсирующих грузов 19 (одного или нескольких) на нем возникает усилие, которое, передаваясь через установочное место 11 на вход преобразователя 12 усилия и давление, преобразуется в компенсирующее давление Р, подаваемое с
выхода преобразователя 12 на один из входов узкопредельного измерителя 14. Таким образом, при нормальных условиях, когда термокомпенсация не реализуется, на механическом сумматоре осуществляется алгебраическое суммирование указанных выше давлений .П.РЗ - вильно говорить о сумьтровании на механическом сумматоре усилий, соответствующих этим давлениям, но поскольку преобразующие элементы 1, 5, 12 и 13 имеют одинаковую конструкцию и выполнены на сильфонах с одинаковой эффективной площадью (возможно
фактическое неравенство указанных площадей устраняется соответствующим подбором плеч на рычаге 9 при настройке) , то для упрощения описания далее будем говорить только о давлениях, помня, что, применительно к механическому сумматору, под этим подразумеваются соответствующие этим давлениям усилия :
35
СР +р )р р 1)р г и и .
(2)
или
, +DP,
(3)
40 где DP - разность гидростатического Рр и компенсирующего Р давлений, т.е. вел}гчина недокомпенсации гидростатического давления Р компенсирующим давлением Р, измеряемая уз45 копредельным измерителем 14.
Таким образом, для определения гидростатического давления Р необходимо сформировать (путем установки соответствующих грузов 19 на рычаг 9
50 определенное компенсирующее давление PI , измерить величину недокомпенсации DP и просуммировать полученные значения согласно вьфажению (3). Измеренное значение гидростатичес55 кого давления Р поступает на вход узла 18 отображения информации.
ФормироваЛ1е команды на установку соответствующих компенсирующих
грузов 19 в зависимости от измеряемой величины гидростатического давления Р осуществляется блоком 15 управления. Для этого с выхода широ- копредельного измерителя 16 (фиг.1) в блок 15 управления поступает грубо измеренное (при классе точности 0,25% работающего совместно с АЦП класса 0,1 измерителя 16 и диапазо- не измерения 0,1 МПа максимальная погрешность йРр измерения гидростатического давления Р не превышает 300 Па) значение РГУ, которое в дальнейшем используется в качест- ве первого приближения значения Р,,. Из зависимости (1) следует, что при выбранных конструктивных параметрах а и S устройства массы грузов т и длины плеч Ь установки на их рычаге 9 подбираются такими, чтобы при установке отдельных грузов 19 или их комбинаций на рычаг 9 с выхода преобразователя 12 на вход узко- предельног.о измерителя 14 поступали требуемые значения (дискретные) компенсирующего давления Р,. Если, например, в качестве системы счисления, значений Р | выбрать двоичную (этим обеспечивается, по сравнению с прототипом, как уменьшение требуемого, при тех же дискретности и верхнем пределе измерения, количества компенсирующих грузов, так и количества операций по их установке), то массы компенсирующих грузов 19 т и длины плеч Ьр их установки на рычаге 9 подбираются таким образом, чтобы дискретные значения компенсирующих давлений РКП (в правой части указан- ной зависимости) соответствовали последовательности чисел в двоичной системе счисления, т.е. 2 , где показатель степени п выражается целым числом (как положительным, так и отри- дательным) или нулем. Например, если взять в качестве п последовательност действительных чисел от -3 до +3, получим следующую последовательность чисел 2 :
п: -3 -2 -1 О 1 2 3
(4)
2 : 0,125 0,25 0,5 1 2 4 8
Но поскольку в выражении (1) п соответствует номеру компенсирующего груза и поэтому отрицательным быть не может, то для обеспечения использования чисел 2 с отрицательным показателем степени (для выражения в двоичной системе счисления дробных чисел) введена величина сдвига показателя степени k, обеспечивающего сдвиг показателя степени числа 2 в область отрицательных чисел. Кроме того, поскольку в конкретном использовании последовательности чисел 2 для получе- ния дискретных значений компенсирующих давлений Р.... могут использоваться
«ли
значения, кратным числам, входящим в эту последовательность (например, 2,5 или 250 или 2500 - все кратны значению 0,25), то введен коэффициент кратности К используемых значений Р ц(, по отношению к базовой (4) последовательности чисел 2 (понятно, что приведенная в (4) последовательо
ность чисел I может быть продлена как влево, так и вправо и в качестве базового может быть.выбран любой ее отрезок). Для определения значения К достаточно знать первое значение из пользуемого отрезка последовательности чисел 2 и соответствующее ему значение компенсирующего давления , тогда
, Nk К Р,,/2 ,
(5)
где Р - наименьшее из компенсирующих давлений, используемых в системе дискретной компенсации, соответствующее установке на рычаг компенсирующего груза с порядковым номером &дин, т.е. с
.-k
2 - наименьшее из значений используемого отрезка последовательности чисел , соответствующее . Теперь для определения дискретных значений Р достаточно умножить сот ответствующее значение из выбранного отрезка последовательности 2 на величину коэффициента кратности К
n-k
Р. 2 К, kn
(6)
55
где величина сдвига показателя степени k определяется как
k.1-log,(2).,--lfg---i. (7)
Предположим, что система дискретной компенсации, например, содержит
Р - 7 -
)8)
1516811И)
шесть грузов, а наименьшее значение компенсирующего давления Р, 2500 Па.
В этом случае 2 ,25; К 2500/0,25 Вычисляем последовательность ком- 10000; - log,,(0,25)3, а зани- пенсирующих давлений Р,,, для указан- симость (6) имеет вид
него случая: 345
1
2 : 0,25
Р Чп f
но , Па: 2500
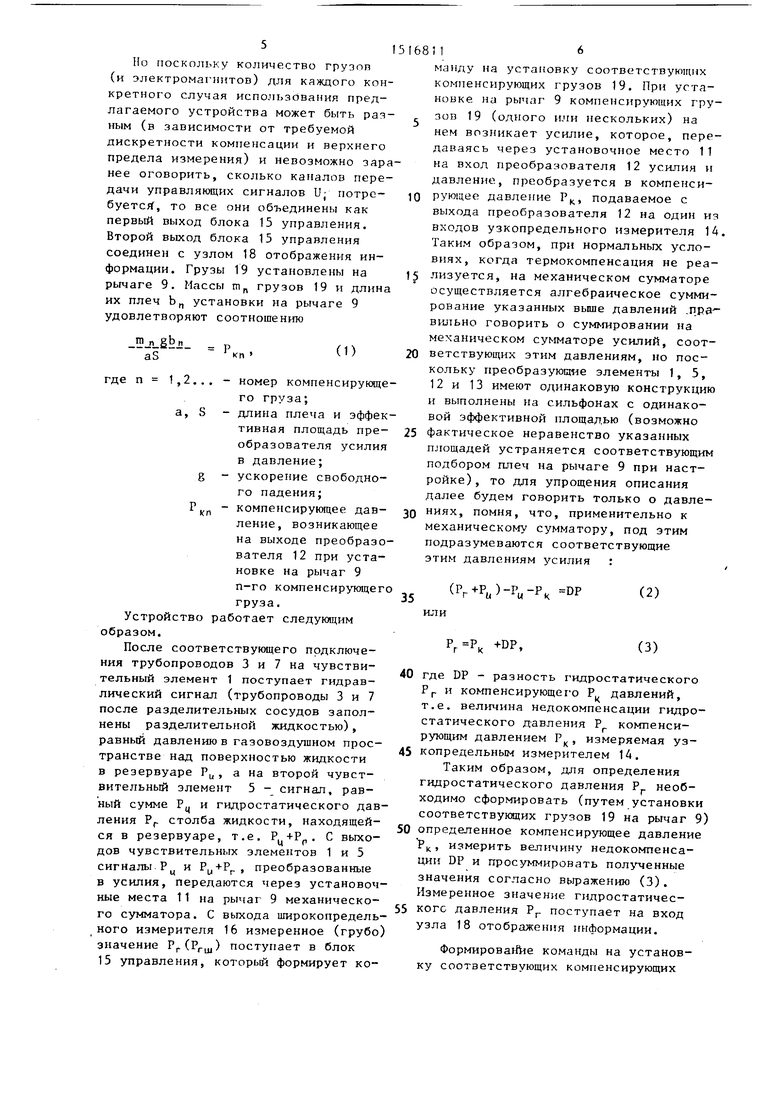
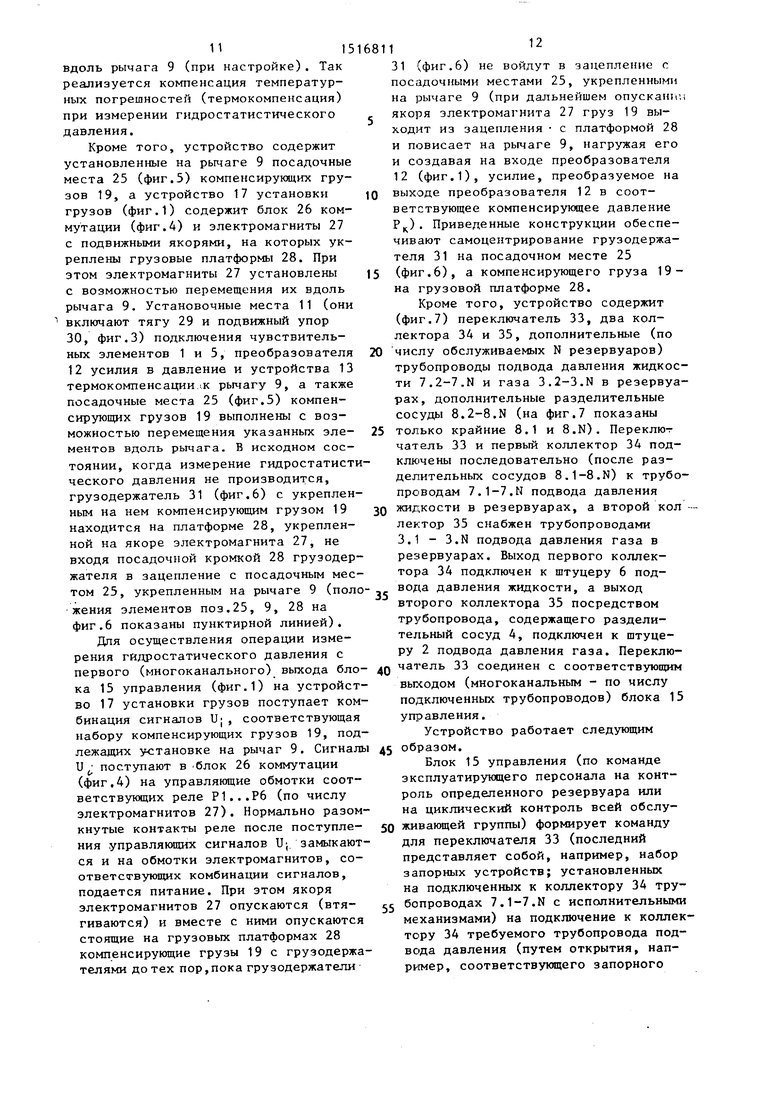
Устройство 13 термокомпенсации конструктивно может быть выполнено, например, в виде сильфона 20, внутреняя полость которого с одной стороны закрыта крышкой 21 (фиг.2). Сильфон 20 помещен внутрь цилиндрического корпуса 22 и другой стороной так соединен (например, припаян-) с корпусом 20, что боковая наружная поверхность сильфона 20 и крышка 21 с одной стороны и боковая внутренняя поверхность и дно корпуса 22 с другой образуют полость 23, которая посредством трубки 24 сообщена с минусовой камерой узкопредельного (дифференциального) измерителя 14 (фиг.1). Таким образом, полость 23, внутрення полость трубки 24 и минусовая камера измерителя 14 образуют ограниченный объем, заполненный жидкостью. Такой же ограниченный объем образует и преобразователь 12, имеющий подобную конструкцию на базе сильфона с эффективной площадью, равной эффективной площади сильфона 20, соединенной с плюсовой камерой измерителя 14 посредством аналогичной трубки 24.
При отклонении температуры жидкости, заполняющей указанные ограниченные объемы, от температуры, при которой осуществлялось заполнение жидкостью (такое отклонение будет иметь место при соответствующем отклонении температуры окружающей ере- ды), в замкнутых объемах преобразователя 12 и устройства 13 термокомпенсации возникают равные температур- ные приращения давлений, поскольку равны объемы (при необходимости их можно корректировать изменением длины трубки 24) и одинаковы условия теплопередачи. Если бы свободный конец сильфона 20 (фиг.2) не соединялся с рычагом 9,.то изменение температуры жидкости в ограниченном объеме привело бы к соответствующему приращению
Р - 7 -
)8)
Вычисляем последова пенсирующих давлений Р
него случая: 45
6 8
10000 20000 40000 80000
20
25
30
15 Q
35
40
5
5
объема жидкости за счет деформации (сжатия или растяжения) сильфона 20. Однако и в этом случае давление внутри ограниченного объема.не было бы равным нулю (как при заполнении его жидкостью) - остаточное (после деформации сильфона) давление было бы таким, чтобы через эффективную площадь сильфона преобразовалось в усилие,, равное усилию жесткости сдеформиро- ванного сильфона - чтобы система находилась в равновесии. В действительности свободные концы сильфо- нов преобразователя 12 и устройства 13 термокомпенсации не имеют возможности перемещения, так как они посредством установочных мест 11 соединены с рычагом 9. Поэтому в этих ограниченных (замкнутых) объемах возникают значительные температурные приращения давлений (точнее - в заполняющей их жидкости).При равенстве объемов заполняющих жидкостей в двух этих ограниченных объемах (что вполне достижимо) в них возникают и равные давления, которые, будучи преобразованными через эффективные площади сильфонов, приводят к возникновению равных, но противоположно направленных моментов, приложенных к рычагу 9, т.е. они взаимно компенсируют друг друга на механическом сумматоре. На практике эффективные площади сильфонов одного типоразмера могут отличаться, а значит, при одинаковых давлениях внутри двух рассматриваемых ограниченных объемов от преобразователя 12 и устройства 13 термокомпенсации к рычагу 9 будут приложены несколько отличающиеся усилия. И тем не менее, к рычагу 9 будут приложены равные моменты, поскольку указанное неравенство эффективных площадей (и усилий) легко устранимо путем подбора соответствующих длин .плеч перемещением указанных элементов 12 и 13
вдоль рычага 9 (при настройке). Так реализуется KONmeHcauHH температурных погрешностей (термокомпенсация) при измерении гидростатистического давления.
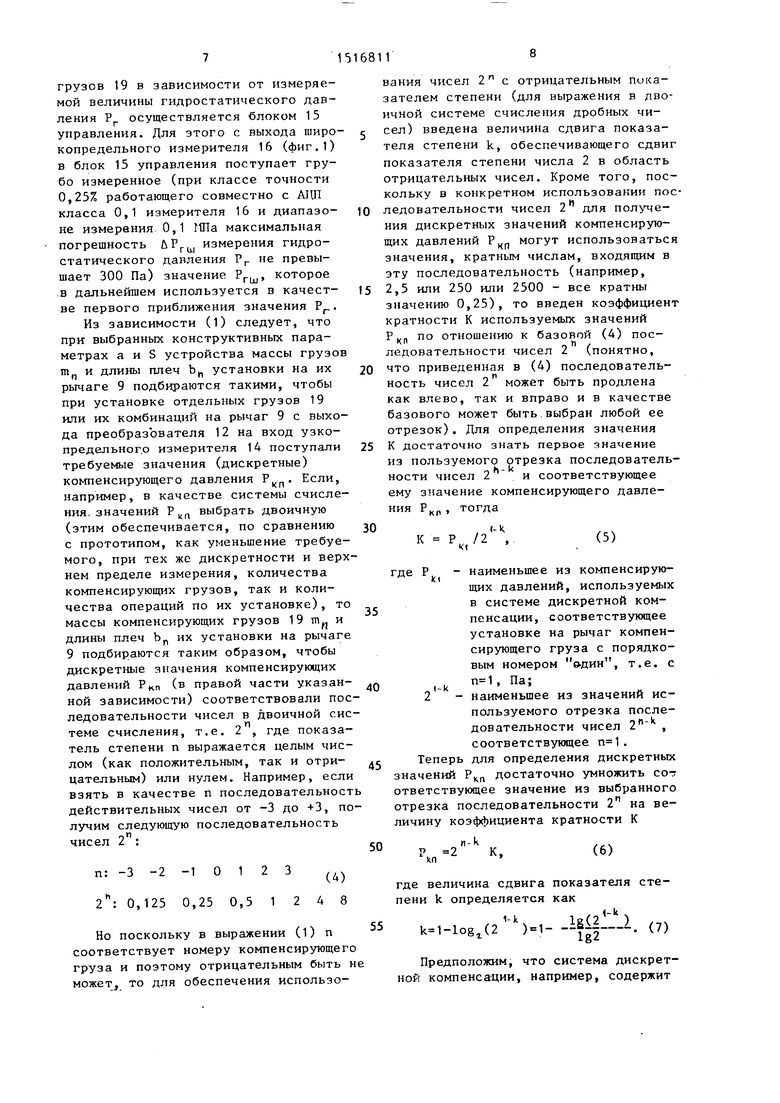
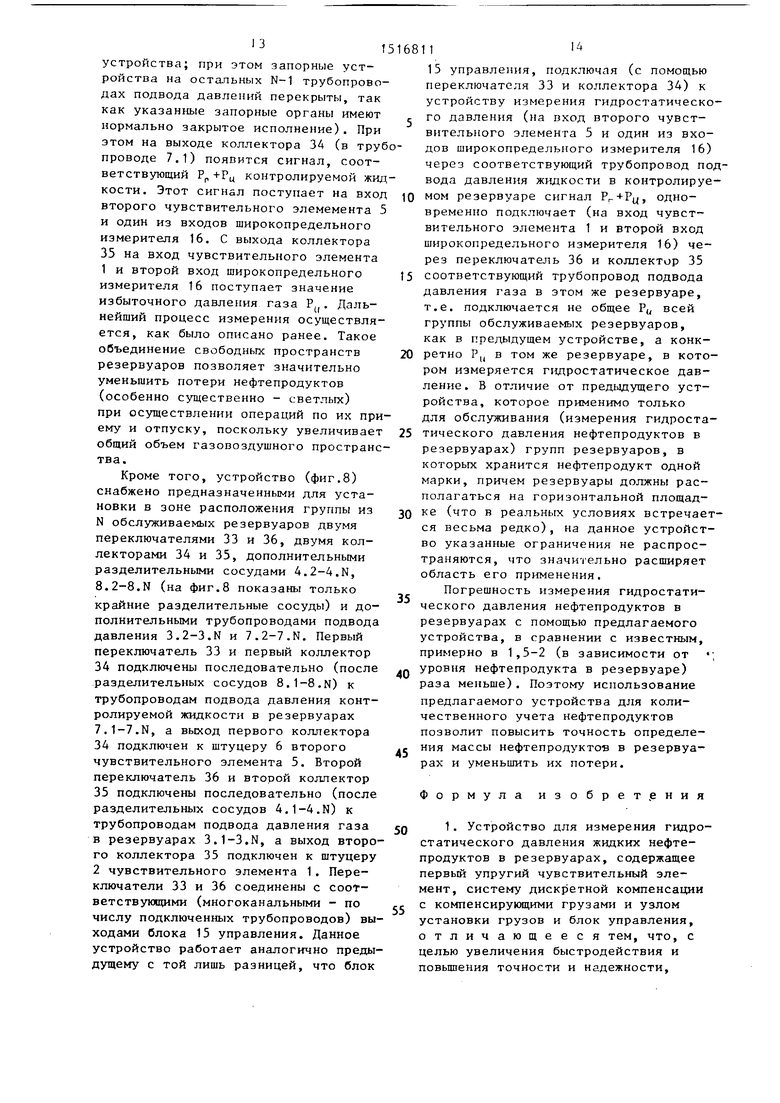
Кроме того, устройство содержит установленные на рычаге 9 посадочные места 25 (фиг.5) компенсирующих грузов 19, а устройство 17 установки грузов (фиг.1) содержит блок 26 коммутации (фиг.А) и электромагниты 27 с подвижными якорями, на которых укреплены грузовые платформы 28. При этом электромагниты 27 установлены с возможностью перемещения их вдоль рычага 9, Установочные места 11 (они включают тягу 29 и подвижный упор 30, фиг.З) подключения чувствительных элементов 1 и 5, преобразователя 12 усилия в давление и устройства 13 термокомпенсации.tK рычагу 9, а также посадочные места 25 (фиг.З) компенсирующих грузов 19 выполнены с возможностью перемещения указанных элементов вдоль рычага. В исходном состоянии, когда измерение гидростатистического давления не производится, грузодержатель 31 (фиг.6) с укрепленным на нем компенсирующим грузом 19 находится на платформе 28, укрепленной на якоре электромагнита 27, не входя посадочной кромкой 28 грузодер- жателя в зацепление с посадочным местом 25, укрепленным на рычаге 9 (положения элементов поз.25, 9, 28 на фиг.6 показаны пунктирной линией).
Для осуществления операции измерения гидростатического давления с первого (многоканального) выхода блока 15 управления (фиг.1) на устройство 17 установки грузов поступает комбинация сигналов U, соответствующая набору компенсирующих грузов 19, подлежащих установке на рычаг 9. Сигнал и ; поступают в блок 26 коммутации (фиг,4) на управляющие обмотки соответствующих реле Р1...Р6 (по числу электромагнитов 27). Нормально разомкнутые контакты реле после поступления управлякяцих сигналов U;. замыкаются и на обмотки электромагнитов, соответствующих комбинации сигналов, подается питание. При этом якоря электромагнитов 27 опускаются (втягиваются) и вместе с ними опускаются стоящие на грузовых платформах 28 компенсирующие грузы 19 с грузодержа телями до тех пор,пока грузодержатели
31 (фиг.6) не войдут в зацепление с посадочными местами 25, укрепленными на рычаге 9 (при дальнейшем onycKaHim якоря электромагнита 27 груз 19 выходит из зацепления с платформой 28 и повисает на рычаге 9, нагружая его и создавая на входе преобразователя 12 (фиг.1), усилие, преобразуемое на выходе преобразователя 12 в соответствующее компенсирующее давление Р). Приведенные конструкции обеспечивают самоцентрирование грузодержа- теля 31 на посадочном месте 25 5 (фиг.6), а компенсирующего груза 19- на грузовой платформе 28.
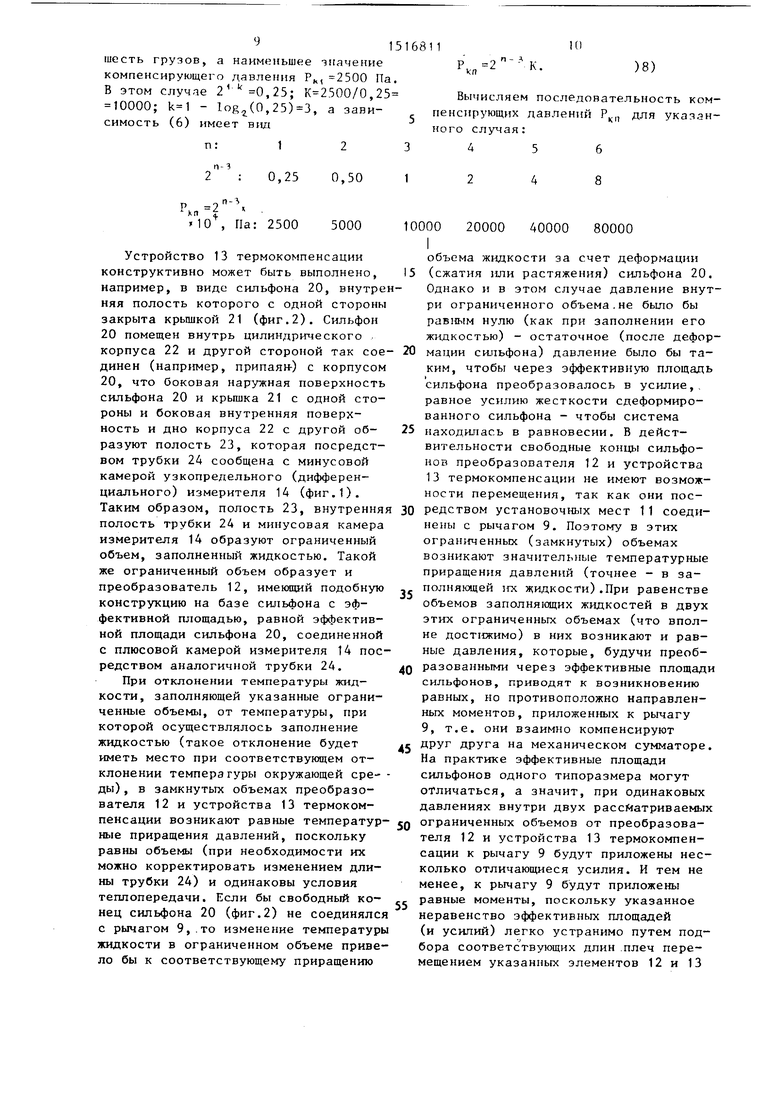
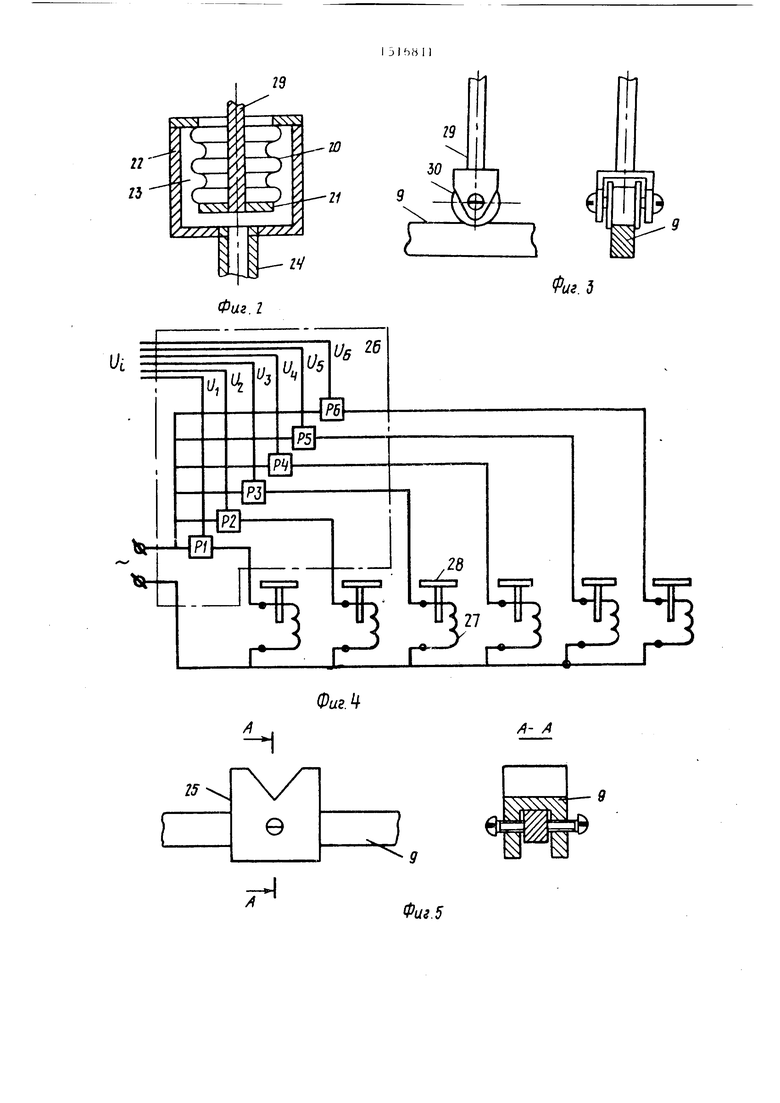
Кроме того, устройство содержит (фиг.7) переключатель 33, два коллектора 34 и 35, дополнительные (по 0 числу обслуживаемых N резервуаров) трубопроводы подвода давления жидкости 7.2-7.N и газа 3.2-3.N в резервуарах, дополнительные разделительные сосуды 8.2-8.N (на фиг.7 показаны 5 только крайние 8.1 и 8.N). Переключатель 33 и первый коллектор 34 под- клк1чены последовательно (после разделительных сосудов 8.1-8.N) к трубопроводам 7.1-7.N подвода давления 0 жидкости в резервуарах, а второй кол - лектор 35 снабжен трубопровода т 3.1 - 3.N подвода давления газа в резервуарах. Выход первого коллектора 34 подключен к штуцеру 6 под- вода давления жидкости, а выход второго коллектора 35 посредством трубопровода, содержащего разделительный сосуд 4, подключен к щтуце- ру 2 подвода давления газа. Переключатель 33 соединен с соответствующим вькодом (многоканальным - по числу подключенных трубопроводов) блока 15 управления.
Устройство работает следующим 45 образом.
Блок 15 управления (по команде эксплуатирующего персонала на контроль определенного резервуара или на циклический контроль всей обслу- 50 живающей группы) формирует команду для переключателя 33 (последний представляет собой, например, набор запорных устройств; установленных на подключенных к коллектору 34 тру- 55 бопроводах 7.1-7.N с исполнительными механизмами) на подключение к коллектору 34 требуемого трубопровода подвода давления (путем открытия, нап- ptwep, соответствующего запорного
40
3
устройства; при этом запорные устройства на остальных N-1 трубопроводах подвода давлений перекрыты, так как указанные запорные органы имеют нормально закрытое исполнение). При этом на выходе коллектора ЗА (в трубпроводе 7.1) появится сигнал, соответствующий Рр +РЦ контролируемой жидкости. Этот сигнал поступает на вход второго чувствительного элемемента 5 и один из входов широкопредельного измерителя 16. С выхода коллектора 35 на вход чувствительного элемента 1 и второй вход широкопредельного измерителя 16 поступает значение избыточного давления газа Р. Дальнейший процесс измерения осуществляется, как было описано ранее. Такое объединение свободных пространств резервуаров позволяет значительно уменьшить потери нефтепродуктов (особенно существенно - светлых) при осуществлении операций по их приему и отпуску, поскольку увеличивает общий объем газовоздушного пространства.
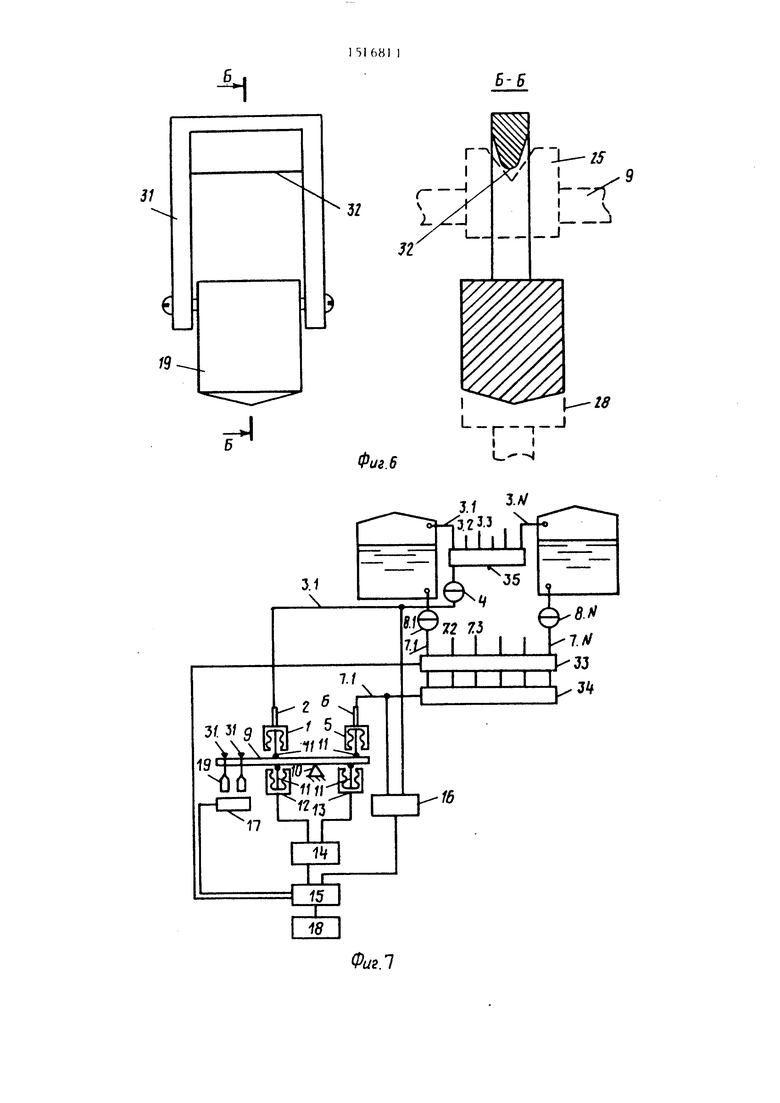
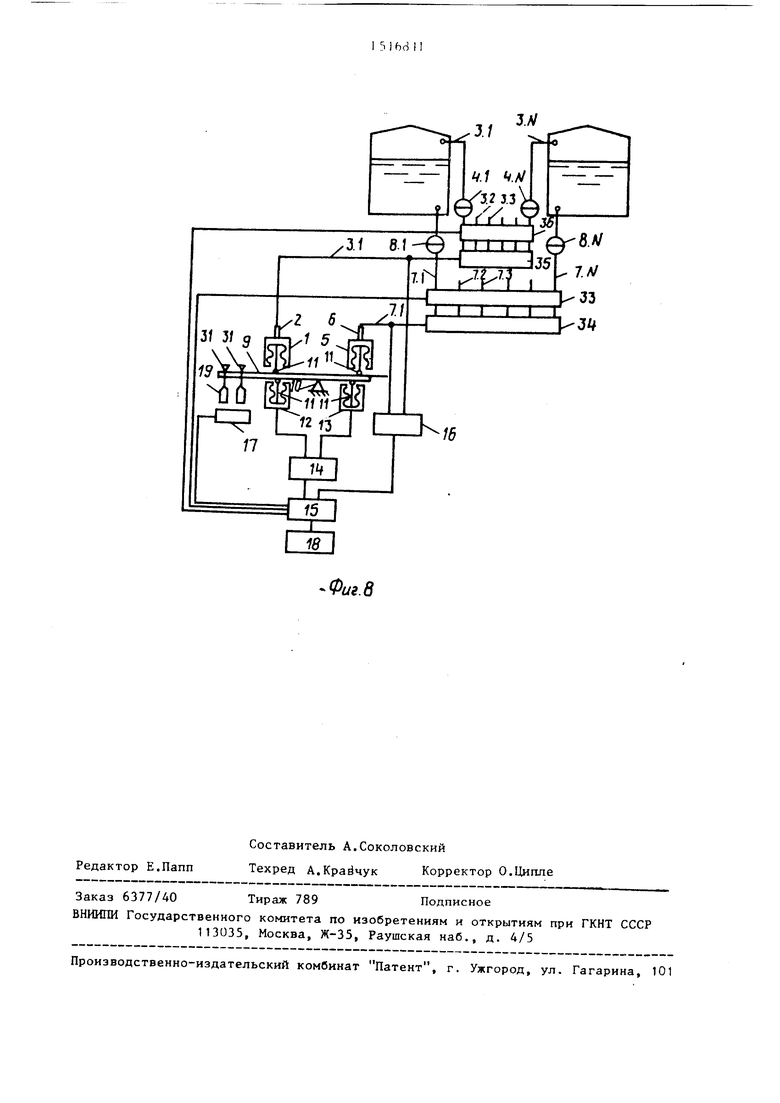
Кроме того, устройство (фиг.8) снабжено предназначенными для установки в зоне расположения группы из N обслуживаемых резервуаров двумя переключателями 33 и 36, двумя коллекторами 34 и 35, дополнительными разделительными сосудами 4.2-4.N, 8.2-8.N (на фиг.8 показаны только крайние разделительные сосуды) и дополнительными трубопроводами подвода давления 3.2-3.N и 7.2-7.N. Первый переключатель 33 и первый коллектор 34 подключены последовательно (после разделительных сосудов 8.1-8.N) к трубопроводам подвода давления контролируемой жидкости в резервуарах 7.1-7.N, а выход первого коллектора
34подключен к штуцеру 6 второго чувствительного элемента 5. Второй переключатель 36 и второй коллектор
35подключены последовательно (после разделительных сосудов 4.1-4.N) к трубопроводам подвода давления газа в резервуарах 3.1-3.N, а выход второго коллектора 35 подключен к штуцеру
2 чувствительного элемента 1. Переключатели 33 и 36 соединены с соответствующими (многоканальными - по числу подключенных трубопроводов) выходами блока 15 управления. Данное устройство работает аналогично предыдущему с той лишь разницей, что блок
11
14
Q 5 0 5
п Q
е
Q
5
15 управления, подключая (с помощью переключателя 33 и коллектора 34) к устройству измерения гидростатического давления (на вход второго чувствительного элемента 5 и один из входов широкопредельного измерителя 16) через соответствующий трубопровод подвода давления жидкости в контролируемом резервуаре сигнал Р,-+Ру, одновременно подключает (на вход чувствительного элемента 1 и второй вход широкопредельного измерителя 16) через переключатель 36 и коллектор 35 соответствующий трубопровод подвода давления газа в этом же резервуаре, т.е. подключается не общее Р, всей группы обслуживаемых резервуаров, как в предыдущем устройстве, а конкретно Р(, в том же резервуаре, в котором измеряется падростатическое давление. В отличие от предыдущего устройства, которое применимо только для обслуживания (измерения гидростатического давления нефтепродуктов в резервуарах) групп резервуаров, в которых хранится нефтепродукт одной марки, причем резервуары должны располагаться на горизонтальной площадке (что в реальных условиях встречается весьма редко), на данное устройство указанные ограничения не распространяются, что значительно расширяет область его применения.
Погрешность измерения гидростатического давления нефтепродуктов в резервуарах с помощью предлагаемого устройства, в сравнении с известным, примерно в 1,5-2 (в зависимости от ; уровня нефтепродукта в резервуаре) раза меньше). Поэтому использование предлагаемого устройства для количественного учета нефтепродуктов позволит повысить точность определения массы нефтепродуктов в резервуарах и уменьшить их потери.
Формула изобретения
1515
оно снабжено механическим сумматором в виде двуплечего рычага с посадочными и установочными местами, преобразователем усилия и давления, вторым чувствительным элементом, узлом термокомпенсации, узкопредельным и широкопредельным измерителями разности давлений и узлом отображения информации, причем на первом плече рычага размещены посадочные места для компенсирующих грузов, установочные места подключения первого упругого чувствительного элемента и преобразователя усилия в давление, а на втором плече рычага разЫещены установочные места подключения второго упругого чувствительного элемента и узла термокомпенсации, при этом полость первого чувствительного элемента снабжена штуцером подвода давления газа в резервуаре, а полость второго чувствительного элемента - штуцером подвода давления жидкости в резервуаре, выход преобразователя усилия в давление и узел термокомпенсации соединены с входами узкопредельного измерителя, выход которого соединен с входом блока управления, выход которого соединен с узлом установки грузов и с узлом отображения информации, причем широкопредельный измеритель входами подключен к штуцерам подвода давления жидкости и газа в резервуаре, а выходом - к блоку управления.
0
5
20
25
30
35
40
45
116
вые платформы, причем нижняя часть компенсирующих грузов выполнена в виде конуса, а грузовые платформы с соответствующей обратной конусностью, причем электромагниты, посадочные и установочные места выполнены с возможностью перемещения вдоль рычага.
к трубопроводам подвода давления жидкости от резервуаров, а второй коллектор снабжен трубопроводами подвода давления газа в резервуарах, причем выход первого коллектора подключен к штуцеру подвода давления жидкости в резервуаре, а выход второго - к штуцеру подвода давления газа в резервуаре, при этом переключатель соединен с блоком управления.
в резервуарах, а вторые переключатель и коллектор подключены последот вательно к трубопроводам подвода давления газа в резервуарах, при этом выходы первого и второго коллекторов подключены соответственно к щтуцерам подвода давления жидкости и газа в резервуарах, а первый и второй переключатели.соединены с блоком управления.
ФигЛ
J/
(
/9
И
Г
25
3f
h--
.:i
J
--/
Фиг.6
If
.7
-Фиг. в
./ .v
tel
f
,1 11 I I L ,
JJ5
К
И.
I
I г
У-ЗЦ
| Устройство для измерения давления | 1982 |
|
SU1051392A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Алиев Т.Н., Тер-Хасатуров А.А | |||
| Информационно-Измерительные системы количественного учета нефти и нефтепродуктов | |||
| - М.: Недра, 1976, с.160. | |||
