Изобретение относится к бурению скважин, в частности к средствам измерения их глубины.
Целью изобретения является повыше- нив точности измерения глубины скважины при спуско-подъемных операциях за счет ликвидации погрешностей, возникающих при динамических режимах работы подъемной установки.
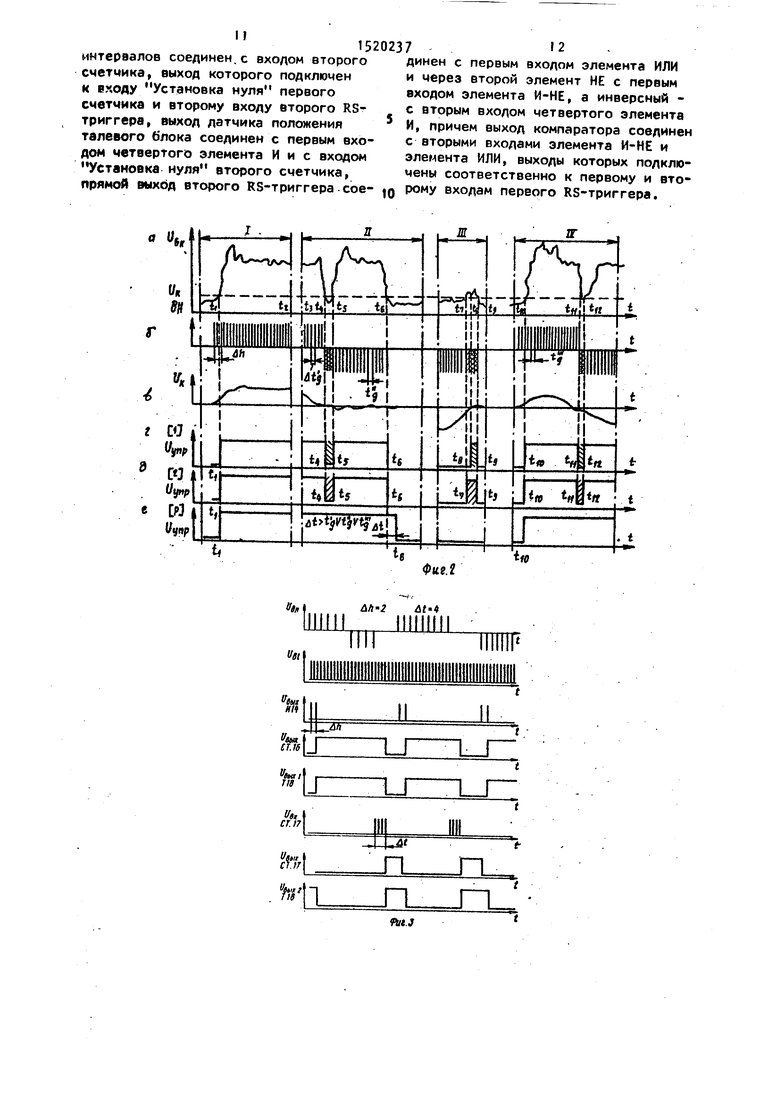
На фиг,1 представлена структурная схема устройства; на фиг.2 - временные зависимости, характеризующие режим спуска vi подъема свечи инструмента; на фиг.З - временные диаграммы is работы блока установления движения.
Устройство для измерения глубины скважины (фиг.1) содержит датчик 1 положения талевого блока, первый RS-триггер 2, первый элемент ИЗ 20 датчик массы на крюке, компаратор 5, блок 6 направления движения бурильного инструмента, второй элемент И 7, счетчик 8 импульсов Над забоем, первый элемент НЕ 9 индикатор 25
10 нуля, третий элемент И 11, счетчик 12 импульсов Яабой, блок 13 установления движения талевого блока, состоящий из четвертого элемента И И, датчика 15 временных интервалов, Q счетчиков импульсов 16 и 17 и второго RS-триггера 18, блок 19 логики, состоящий из второго элемента НЕ 20, элемента И-НЕ 21 и элемента ИЛИ 22.
Выход датчика 1 положения талевого блока соединен с первыми входами первого 3 и четвертого И элементов И, а также входом Установка нуля второго, счетчика 17 импульсов. Выход четвертого элемента И 1 подключен к входу первого счетчика 16 импульсов, выход кЪторого соединен с первым входом второго RS-григгера 18. Выход датчика 15 временних интервалов соединен с входом второго счетчика 17 импульсов, выход которого подключен к второму входу второго RS-триггера 18 и входу Установка нуля первого счетчика 16 импульсов. Первый (прямой) выход второго RS-триггера 18 непосредственно связан с входом вто- рого элемента НЕ 20 и первым входом элемейта ИЛИ 22, а инверсный выход второго RS-триггера 18 соединен с вторым входом четвертого Элемента И
ход которого подключен к вторым вхо дам элементов И-НЕ 21 и ИЛИ 22, а выходы этих элементов соединены соответственно с первым и вторым входами первого RS-триггера 2. Выход первого RS-триггера 2 подключен к второму входу первого элемента И 3, а выход этого элемента соединен с входом блока 6 направления движения бурильного инструмента. Первый выход блока 6 направления движения бурильного инструмента подключен к первым входам втортэго 7 и третьего 11 элементов И, а второй выход этого блока соединен с первым входом счетчика 8 импульсов Над забоем, выход которого через индикатор 10 нуля подключен к входу первого элемента НЕ 9 и второму входу третьего элемента И 11. Выход первого элемента НЕ 9 соединен с вторым входом второго элемента 7 выход которого подключен к второму входу счетчика 8 импульсов Над забоем а выход третьего элемента И 11 соединен с входом счетчика 12 импульсов Забой.
Устройство работает следующим образом.
При спуске или подъеме инструмента управляющим сигналом, ,разрешающим прохождение импульсов на входы счетчиков импульсов Забой 12 и Над забоем 8 от датчика 1 положения талевого блока, пояйляется выходной 35 сигнал первого RS-триггера 2, открывающий первый элемент И 3 На входы первого RS-триггера 2 поступают управляющие сигналы с блока 19 логики, на который через компаратор 5 поступают основной сигнал управления с датчика 4 массы на крюке и блокирующий сигнал с выхода;второго RS-триггера 18 блока 13 установления движения талевого блока.
Первый RS-триггеЬ 2 устанавливается в состояние логической единицы только при условии наличия сигнала на выходе датчика Ц массы на крюке превышающего значение установ1 и компаратора 5, и отсутствии сигнала на прямом выходе второго RS-триггера 18, которые воздействуют на входы элементов И-НЕ 21 и ИЛИ 22.
Выключение первого RS-триггера 2
40
45
50
1. Выход второго элемента НЕ 20 под- 55происходит элементом И-НЕ 21 при отключен к первому входу элемента И-НЕсутствии управляющих сигналов датчи- 21. Выход датчика i массы на крюкека Ц массы на крюке и блока 13 уста- соединен с входом, компаратора 5, вы-новления движeниjЯ талевого блока.
ход которого подключен к вторым вхо дам элементов И-НЕ 21 и ИЛИ 22, а выходы этих элементов соединены соответственно с первым и вторым входами первого RS-триггера 2. Выход первого RS-триггера 2 подключен к второму входу первого элемента И 3, а выход этого элемента соединен с входом блока 6 направления движения бурильного инструмента. Первый выход блока 6 направления движения бурильного инструмента подключен к первым входам втортэго 7 и третьего 11 элементов И, а второй выход этого блока соединен с первым входом счетчика 8 импульсов Над забоем, выход которого через индикатор 10 нуля подключен к входу первого элемента НЕ 9 и второму входу третьего элемента И 11. Выход первого элемента НЕ 9 соединен с вторым входом второго элемента 7 выход которого подключен к второму входу счетчика 8 импульсов Над забоем а выход третьего элемента И 11 соединен с входом счетчика 12 импульсов Забой.
Устройство работает следующим образом.
При спуске или подъеме инструмента управляющим сигналом, ,разрешающим прохождение импульсов на входы счетчиков импульсов Забой 12 и Над забоем 8 от датчика 1 положения талевого блока, пояйляется выходной 5 сигнал первого RS-триггера 2, открывающий первый элемент И 3 На входы первого RS-триггера 2 поступают управляющие сигналы с блока 19 логики, на который через компаратор 5 поступают основной сигнал управления с датчика 4 массы на крюке и блокирующий сигнал с выхода;второго RS-триггера 18 блока 13 установления движения талевого блока.
Первый RS-триггеЬ 2 устанавливается в состояние логической единицы только при условии наличия сигнала на выходе датчика Ц массы на крюке превышающего значение установ1 и компаратора 5, и отсутствии сигнала на прямом выходе второго RS-триггера 18, которые воздействуют на входы элементов И-НЕ 21 и ИЛИ 22.
Выключение первого RS-триггера 2
0
5
0
Блокирующий сигнал блока 13 установления движения обеспечивает ликвидацию погрешностей измерения длины бурильного инструмента, обусловленны изменениями натяжения талевого каната при торможениях и ускорениях подъемной установки.
Принцип формирования этого сигнала заключается в следующем.
В начальный момент перемещения талевого блока (например, при подъеме инструмента с ротора) импульсы от датчика 1 положения через открытый четвертый элемент И 1 поступают а первый счетчик 1б с заданным коэффициентом пересчета, выходной сигнал которого устанавливает второй RS- триггер 18 в состояние логической единицы, что соответствует возникновению сигнала наличия движения талевого блока. Задержка на включение второго RS-триггера 18 по перемещению 4h, определяемая коэффициентом пересчета первого счетчика 16, необходима для приоритетного включения первого RS-триггера 2 в состояние логической единицы от сигнала датчика массы на крюке. Сброс второго RS- триггера 18 осуществляется временной паузой utt устанавливаемой коэффициентом пересчета второго счетчика 17 и частотой импульсов с датчика 5 временных интервалов. -Длительность этой паузы устанавливается экспериментальным путем в зависимости от величины дискреты датчика 1 положения талевого блока.
Таким образом, сигнал, устанавливающий движение талевого блока (выходной сигнал второго RS-триггера 18) возникает в случае, если талевый
0237
10
блок пройдет расстояние Ah, задаваемое коэффициентом пересмета первого счетчика 1б, и исчезает, если время прохождения талевым блоком расстояния, равного одной дискрете сГь датчика 1 положения талевого блока, превышает значение 4t. Это расстояние связано с временем соотношением (в пределах дискреты можно предполо)чить, что ускорение (замедление) остаются неизменными)
c/h
/ot,i 2
(1)
талевогд
где V - скорость движения
блока в начале дискреты; а - ускорение (замедление) талевого блока;
td - время прохождения расстояния, равного одной дискрете. Знак V относится к ускоренному, и знак к замедленному, движению. Сигнал наличия движения существует до тех пор, пока .
Как следует из (), блок 13 установления движения талевого блока учитывает не только скорость движения, но и ускорение подъемной системы буровой установки при выполнении ею основных и вспомогательных операций. , Это необходимо вследствие реализации сложных законов движения подъемной Системы при посадке бурильного инструмента на ротор и остановке его в верхнем положении в конце подъема чередной свечи. Эти движения реализуются бурильщиком вручную и не подиняются детерминированным зависимосям.
В таблице представлена логика форирования выходного сигнала первого , S-триггера 2.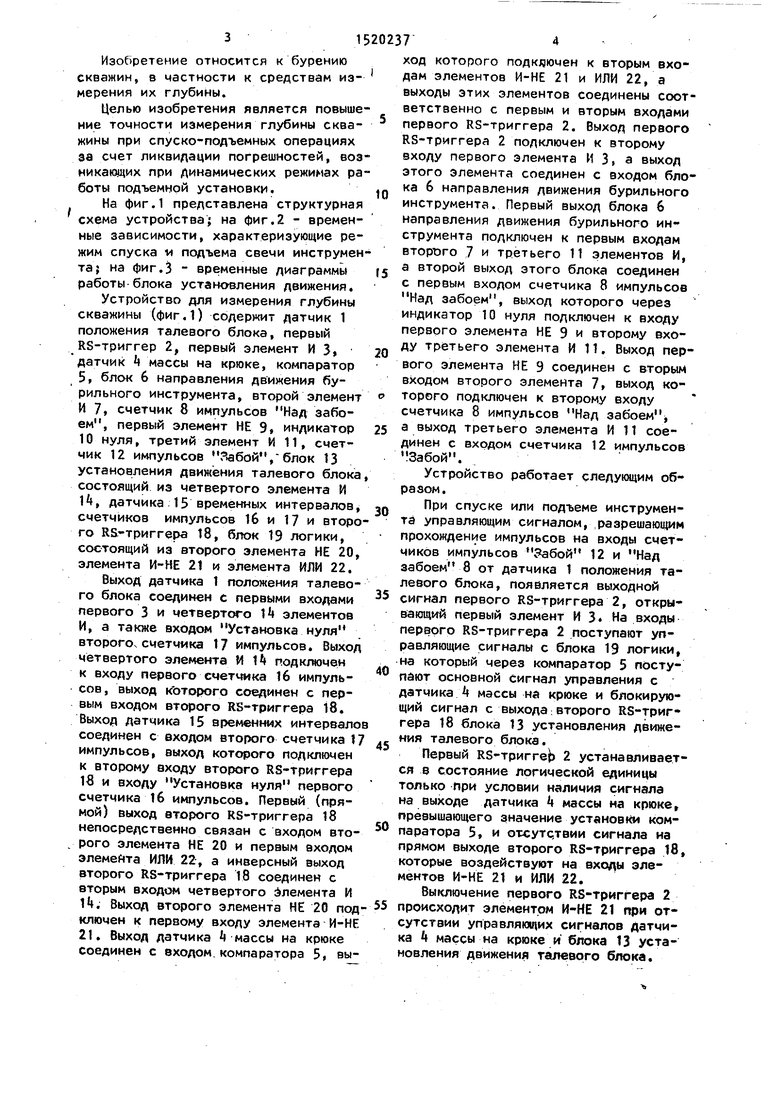
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения глубины скважины | 1980 |
|
SU875001A1 |
| Устройство для измерения глубины скважины в процессе бурения | 1984 |
|
SU1270307A1 |
| Устройство для измерения глубины скважины | 1983 |
|
SU1099057A1 |
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
| Устройство для измерения механической скорости бурения | 1980 |
|
SU983259A1 |
| Устройство для измерения глубины скважины в процессе бурения | 1991 |
|
SU1810519A1 |
| Устройство для измерения механической скорости бурения | 1980 |
|
SU876974A1 |
| Устройство для измерения глубины скважин в процессе бурения | 1988 |
|
SU1615350A1 |
| Устройство для определения износа долота в процессе бурения | 1979 |
|
SU872736A1 |
| Устройство оптимизации спуско-подъемных операций в бурении | 1987 |
|
SU1492030A1 |
Изобретение относится к области бурения скважин и позволяет повысить точность измерения их глубины при спуско-подъемных операциях. Устройство содержит датчик 1 положения талевого блока, RS-триггер 2,три элемента И 3,7 и 11, датчик 4 веса на крюке, компаратор 5, блок 6 направления движения бурильного инструмента, счетчики 8 и 12 соотв.импульсов "над забоем" и "забой", индикатор 10 "нуля" и элемент НЕ 9. Для устранения погрешностей измерения при динамических режимах в устройство введен блок 13 установления движения талевого блока. В его состав входит четвертый элемент И 14, два счетчика 16 и 17, датчик 15 временных интервалов и RS - триггер 18. Второй элемент НЕ 20, элементы И-НЕ 21 и ИЛИ 22 входят в состав блока 19 логики. Сигнал наличия движения на выходе блока 13 появляется позже сигнала наличия веса на крюке с компаратора 5. Анализируя эти сигналы, блок 19 логики управляет пропуском сигналов с датчика 1 через элемент И 3 на блок 6. В зависимости от направления движения талевого блока счетчик 8 фиксирует глубину скважины или положение долота над забоем, а счетчик 12 - величину последующего углубления скважины при бурении. 3 ил., 1 табл.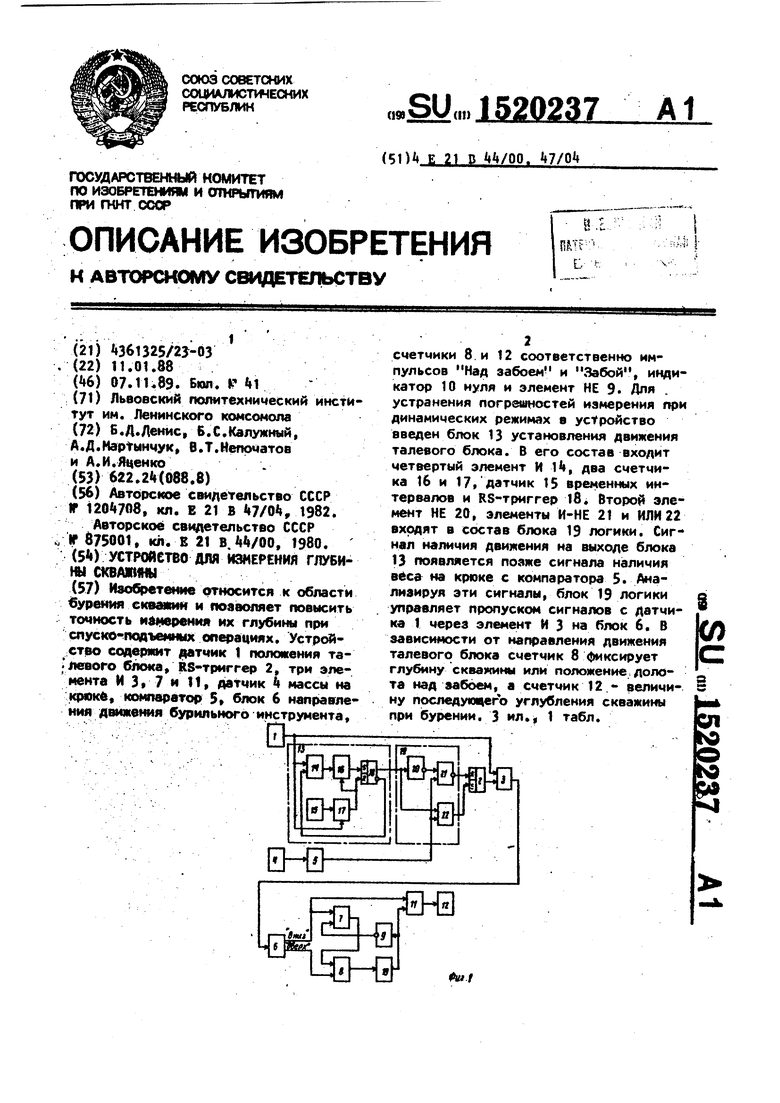
Рассмотрим действие блока 13 установления движения и блока 19 логики
при подъеме из скважины очередной свечи.
После захвата элеватора начинается вижение талевого блока вверх. Первый S-триггер 2 находится в нулевом состоянии. Сигнал наличия движения появится на выходе второго RS-триггера 18 при условии, если первый счетчик
16накопит заданное коэффициентом пересчета число импульсов перемещения талевого блока, а второй счетчик
17не успеет накопить заданное его коэффициентом пересчета количество импульсов, генерируемых датчиком 15 временных интервалов, что соответствует ta.ut.
Выбранный коэффициент пересчета первого счетчика 16 обеспечивает натяжение талевого каната и тем самым появление сигнала Вес на крюке до появления сигнала наличия движения. Поэтому в соответствии с третьей строкой таблицы в момент появления сигнала на выходе компаратора 5 первый RS-триггер 2 перейдет в состояние логической единицы и разрешит передачу импульсов перемещения на блок 6 направления движения. После появления сигнала Движение, как следует из четвертой и второй строки таблицы, первый RS-триггер 2 не изменит своего состояния независимо от величины веса на крюке, который может изменяться вследствие запираний колонны о стенки скважины или торможений буровой лебедки.
В конце подъема бурильной колонны на высоту одной свечи с помощью шино- пневматической муфты отключается при-, вод лебедки и колонна останавливается в результате свободного выбега. Вес на крюке может уменьшиться ниже уставки компаратора 5, однако первый RS-триггер 2 при наличии сигнала Движение в соответствии с второй строкой таблицы удерживается в предыдущем состоянии, а импульсы датчика 1 расположения талевого блока при движении колонны в режиме свободного выбега учитываются. В конце выбега сигнал Движение исчезнет (второй RS-триггер 18 перейдет в состояние логического нуля) вследствие того, что ta Лt. Бурильщик накладывает тормоз и вследствие появления сигнала веса на крюке в соответствии с третьей строкой таблицы первый RS- триггер 2 останется в состоянии логической единицы, а первый элемент И 3 продолжает оставаться открытым
0
5
0
до тех пор, пока после опускания бурильной колонны и посадки ее на элеватор или на клинья исчезнут сигналы Вес на крюке и Движение, а первый RS-триггер 2 перейдет в состояние логического нуля. Это состояние сохраняется на протяжении всего времени движения пустого крюка вниз до момента начала подъема следующей свечи независимо от величины натяжения талевого каната.
При наличии разрешающего сигнала на вь1ходе первого RS-триггера 2 импульсы перемещения талевого блока от датчика 1 через первый элемент И 3 поступают на вход блока 6 управления движения, где распределяются на две выходные последовательности, соответствующие движению инструмента вверх и вниз. Реверсивный счетчик 8 импульсов Над забоем следит за подъемом или спуском долота в скважину. При достижении инструмента забоя показа5 ния счетчика 8 соответствуют нулю и индикатор 10 нуля переходит а состояние логической единицы. В результате этого через открытый третий элемент И 11 импульсы с выхода блока 6 Вниз поступают на вход счетчика 12 Забой. При отрыве долота от забоя или подъеме инструмента импульсы с выхода блока 6 Вверх поступают на первый вход Суммирование счетчика 8, который указывает на положение инструмента
над забоем, и индикатор 10 нуля переходит в состояние, противоположное предыдущему. При этом закрывается третий.элемент И 11 и через первый элемент НЕ 9 открывается второй элемент И 7, который подключает выходную шину Вниз на вход Вычитание реверсивного счетчика 8 импульсов Над забоем. Импульсы, появляющиеся на этой шине при движении инструмента вниз, учитываются счетчиком 8 импульсов Над забоем до момента касания долотом забоя.
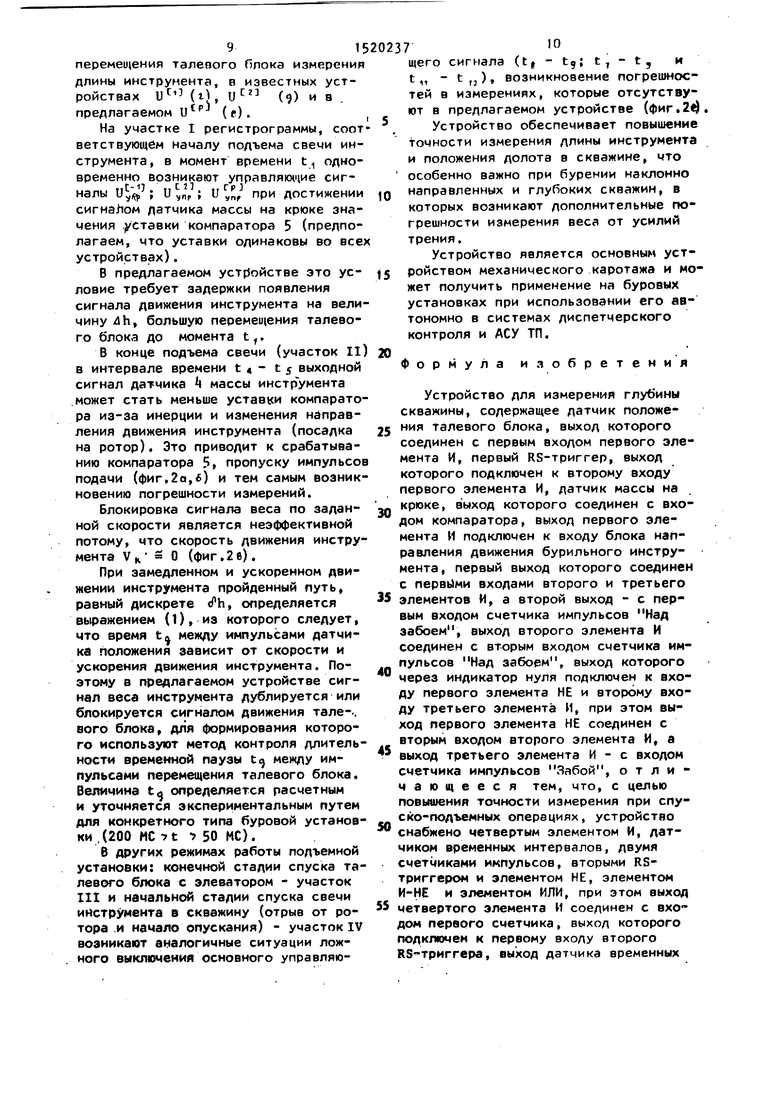
Оценку эффективности устройства можно произвести путем анализа временных зависимостей,-характеризующих спуск и подъем свечи инструмента, представленных на фиг.2, где « - выходное напряжение датчика массы на крюке f- количество дискрет перемещения талевого блока / Н;- Ь - скорости перемещения талевого бЛока выходное напряжение управляющего сигнала, разрешающего счет дискрет.
0
40
45
50
55
IS
перемещения талевого Плока измерения длины инструмента, в известных устройствах (tj, () и в . предлагаемом и - (г).
На участке I регистрограммы, соответствующем началу подъема свечи инструмента, в момент времени t одновременно Возникают управлякнцие сигналы и при достижении Q сигналом датчика массы на крюке значения .уставки компаратора 5 (предполагаем, что уставки одинаковы во всех устройствах).
В предлагаемом устройстве это условие требует задержки появления сигнала движения инструмента на величину /ih, большую перемещения талевого блока до момента t .
В конце подъема свечи (участок И) 20 в интервале времени t 4 t 5 выходной сигнал датчика массы инстр умента .может стать меньше уставки компаратора из-за инерции и изменения направления движения инструмента (посадка на ротор). Это приводит к срабатыванию компаратора 5, пропуску импульсов подачи (фиг,2а,б) и тем самым возникновению погрешности измерений.
Блокировка сигнала веса по заданной скорости является неэффективной потому, что скорость движения инструмента VK О (фиг.2в).
При замедленном и ускоренном движении инструмента пройденный путь, равный дискрете h, определяется выражением (1), из которого следует, что время ta между импульсами датчика положения зависит от скорости и ускорения движения инструмента. Поэтому в предлагаемом устройстве сигнал веса инструмента дублируется или блокируется сигналом движения тале-., вого блока, для формирования которого используют метод контроля длительности временной паузы t между импульсами перемещения талевого блока. Величина t определяется расчетным и уточняется экспериментальным путем для конкретного типа буровой установки, (200 ИС 7t 50 МС).
В других режимах работы подъемной установки: конечной стадии спуска талевого блока с элеватором - участок III и начальной стадии спуска свечи
щего сигнала
10 (t| - t
9
t| t,, - t ,3), возникновение погрешнос тей в измерениях, которые отсутству ют в предлагаемом устройстве (фиг.2
Устройство обеспечивает повышени точности измерения длины инструмент и положения долота в скважине, что особенно важно при бурении наклонно направленных и глубоких скважин, в которых возникают дополнительные по грешности измерения веса от усилий трения.
Устройство является основным уст ройством механического каротажа и м жет получить применение на буровых установках при использовании его ав тономно в системах диспетчерского контроля и АСУ ТП.
Формула изобретения
Устройство для измерения глубины скважины, содержащее датчик положе25 ния талевого блока, выход которого соединен с первым входом первого эле мента И, первый RS-триггер, выход которого подключен к второму входу первого элемента И, датчик массы на крюке, выход которого соединен с вхо дом компаратора, выход первого элемента И подключен к входу блока направления движения бурильного инструмента, первый выход которого соединен с nepBbiMH входами второго и третьего
35 элементов И, а второй выход - с первым входом счетчика импульсов Над забоем, выход второго элемента И соединен с вторым входом счетчика импульсов Над забоем, выход которого через индикатор нуля подключен к входу первого элемента НЕ и второму входу третьего элемента И, при этом выход первого элемента НЕ соединен с вторым входом второго элемента И, а
выход третьего элемента И - с входом счетчика импульсов Забой, отличающееся тем, что, с целью повышения точности измерения при спу- ско-подъемных операциях, устройство
снабжено четвертым элементом И, датчиком временных интервалов, двумя сметчиками импульсов, вторыми RS- триггером и элементом НЕ, элементом И-НЕ и элементом ИЛИ, при этом выход
30
40
инструмента в скважину (отрыв от ро- четвертого элемента И соелинеи с вхо
тора .и начало опускания) - участок IV возникают аналогичные ситуации ложного выключения основного управляюдом первого счетчика, выход которого подключен к первому входу второго RS-трнггера, выход датчика временных
IS
Q
20щего сигнала
10 (t| - t
9
t| t,, - t ,3), возникновение погрешностей в измерениях, которые отсутствуют в предлагаемом устройстве (фиг.2.
Устройство обеспечивает повышение точности измерения длины инструмента и положения долота в скважине, что особенно важно при бурении наклонно направленных и глубоких скважин, в которых возникают дополнительные погрешности измерения веса от усилий трения.
Устройство является основным устройством механического каротажа и может получить применение на буровых установках при использовании его автономно в системах диспетчерского контроля и АСУ ТП.
Формула изобретения
Устройство для измерения глубины скважины, содержащее датчик положения талевого блока, выход которого соединен с первым входом первого элемента И, первый RS-триггер, выход которого подключен к второму входу первого элемента И, датчик массы на крюке, выход которого соединен с входом компаратора, выход первого элемента И подключен к входу блока направления движения бурильного инструмента, первый выход которого соединен с nepBbiMH входами второго и третьего
элементов И, а второй выход - с первым входом счетчика импульсов Над забоем, выход второго элемента И соединен с вторым входом счетчика импульсов Над забоем, выход которого через индикатор нуля подключен к входу первого элемента НЕ и второму входу третьего элемента И, при этом выход первого элемента НЕ соединен с вторым входом второго элемента И, а
выход третьего элемента И - с входом счетчика импульсов Забой, отличающееся тем, что, с целью повышения точности измерения при спу- ско-подъемных операциях, устройство
снабжено четвертым элементом И, датчиком временных интервалов, двумя сметчиками импульсов, вторыми RS- триггером и элементом НЕ, элементом И-НЕ и элементом ИЛИ, при этом выход
четвертого элемента И соелинеи с вхо
дом первого счетчика, выход которого подключен к первому входу второго RS-трнггера, выход датчика временных
интервалов соединен.с входом второго динен с первым входом элемента ИЛИ счетчика, выход которого подключен и через второй элемент НЕ с первым к входу Установка нуля первого входом элемента И-НЕ, а инверсный счетчика и второму входу второго RSс вторым входом четвертого элемента
триггера, выход датчика положения И, причем выход компаратора соединен
талевого блока соединен с первым вхо-с вторыми входами элемента и
дом четвертого элемента И и с входомэлемента ИЛИ, выходы которых подклю Установка нуля второго счетчика,чены соответственно к первому и втопрямой выход второго RS-триггера сое- QРому входам первого RS-триггера,
с вторым входом четвертого элемента
И, причем выход компаратора соединен
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для измерения глубины скважины | 1980 |
|
SU875001A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
