Изобретение относится к радиохех- нике и может использоваться для контроля параметров оконечной цифровой радиорелейной станции при ее изготовлении, эксплуатации и ремонте.
Цель изобретения - повышение достоверности контроля.
На чертеже представлена структурная электрическая схема предложенного ycTройства.
Устройство для контроля параметров дконечной цифровой радиорелейной станции содержит первый и второй элементы связи, выполненные в виде направ- ленных ответвителей 1,2, переменный аттенюатор 3, первый и второй блоки i, 5 коммутации, блок 6 управления, измеритель 7 вероятности ошибки, усилитель 8, измерительный приемник 9, первый и второй фильтры 10,11 нижних частот, генератор 12 шума, сумматор 13, видеорегенератор k, первый генератор 15, смеситель 1б, второй генератор 17. На чертеже показана также контролируемая оконечная цифровая радиорелейная станция (РРС) 18.
Устройство работает следующим образом .
На втором генератора 17 устанавливается частота f,- г вых (или частота f,- fr .ыд несущественно), где fp - частота выходного сигнала первого генератора 15, fвых частота выходного сигнала контцолируемой РРС 18. По сигналу с блока 6 управле- ния выход канала связи второго направленного ответвителя 2 через первый блок k коммутации подключается к входу измерительного приемника 9, настроенного на частоту Сигнал псевдослучайной последовательности (ПСП) с тактовой частотой, соответствующей тактовой частоте контролируемой оконечной цифровой РРС 18, подается через второй блок 5 коммутации с выхода измерителя 7 вероятности ошибки на модулирующий вход первого генератора 15, на выходе которого формируется сигнал на частоте f,- с модуляцией, соответствующей по виду и параметрам модуля- ции контролируемой РРС 18 (например двухуровневая tM с девиацией, равной девиации tM сигна/ia РРС) . На выходе смесителя 1б образуется сигнал fj,, fr -fr, который выделяется и усили- вается усилителем 8.
Данные сигнал через канал связи второго направленного ответвителя 2
g
с 0
5 0 5
0
0
5
и первый блок 1 коммутации поступает на измерительный приемник 9, причем уровень его устанавливают выбором величины переходного затухания второго направленного ответвителя 2 в середине динамического диапазона входных сигналов измерительного приемника 9, таким образом, чтобы собственные его шумы были существенно ниже его уровня, На выходе измерительного приемника 9 выделяется продетектированный сигнал ПСП, который проходит через первый фильтр 10 нижних частот, полоса пропускания которого эквивалентна полосе видеотракта (до входа видеорегенератора) цифровой системы связи, в которой используется контролируемая РРС 18 (например для скорости 8,8 Мбит), частота среза первого фильтра 10 нижних частот должна иметь значение 6,5 МГц, при колоколообразной форме его АЧХ. Полоса пропускания из- мерительного приемника 9 должна быть шире для того, чтобы частотные характеристики приемника (АЧХ и ФЧХ) не искажали сигнал.
В сумматоре 13 выходной сигнал первого фильтра 1C нижних частот суммируется с прошедшим через второй фильтр 11 нижних частот сигналом генератора 12 шума, причем уровень выходного сигнала генератора 12 шума устанавливается таким образом, чтобы на входе видеорегенератора соотношение сигнал/шум соответствовало номинальному пороговому значению при заданной вероятности ошибки для данной контролируемой РРС 18 (например 13 дБ при ). По команде с блока 6 управления выход видеорегенератора И подключается через второй блок 5 коммутации к входу измерителя 7 вероятности ошибки и фиксируется значение вероятности ошибки, если оно не превыи1ает заданное, то устройство считается скалиброванным, после чего проводится измерение параметров контролируемой РРС 18.
Включается питание, по команде с блока 6 управления к модуляционному входу контролируемой РРС 18 через второй блок 5 коммутации подключается сигнал ПСП с выхода измерителя 7 вероятности ошибки, а к входу измерительного приемника 9 через первый блок k коммутации подключается канал связи первого направленного ответ5-1
вителя 1 , с выхода которого на вход измерительного приемника 9 подается выходной сигнал контролируемой РРС l8, который детектируется измерительным приемникам 9. Продетектирован- ный сигнал проходит через первый фильтр 10 нижних чадтот и суммируется в сумматоре 13 с сигналом генератора 12 шума, прошедшим через второй фильтр 11 нижних частот. В видеорегенераторе 1 i происходит восстановление ПСП, которая подается с выхода видеорегенератора И через второй блок 5 коммутации на вход измерителя 7 вероятности ошибки, который производит вычисление числа ошибок. В случае, если вероятность ошибки не превосходит заданной величины, контролируемая РРС 18 считается исправной, если нет - то неисправной. Величину отклонения реальных параметров от установленной в процессе калибровки величины Ррщ легко определить, изменяя уровень выходного сигнала генератора 12 шума в большую сторону (чтобы определить запас энергетического потенциала) или в меньшую сторону (чтобы определить величину неис- правьюсти). Однако переходное ослабление первого направленного ответеителя 1 должно быть выбран таким,чтобы величина сигнала на входе измерительного приемника 9 находилас так же, как и при калибровке, в середине его динамического диапазона.
Затем аналогичным образом по сигналу блока 6 управления fвх производят калибровку устройства на частоте входного сигнала контролируемой РРС 18, перестраивая генератор 12 на частоту fr, fr, -fax и контролируя измерителем 7 вероятности ошибки значение вероятности ошибки при номинальном пороговом значении сигнал/шум на входе видеорегенератора 1 i, после чего по сигналу блока 6 управления подключают цифровой выход контролируемой РРС 18 через второй блок 5 коммутации к входу измерителя 7 вероятности ошибки. При этом на переменном аттенюаторе 3 устанавливают затухание, соответствующее минимальному уровню сигнала на входе контролируемой РРС 18, и определяют величину пороговой чувствительности контролируемой РРС 18 при заданной вероятности ошибки (например - 110 дБ Вт при Рс,и 1 «
0
5
2С
25
5928и
10). Уменьшая затухание переменного аттенюатора 3 на величину динамического диапазона контролируемой РРС 18, нетрудно определить ее параметры при максимальном сигнале на входе (например 70 дБ Вт при Р.,, 1 -10 )..
Формула изобретения
Устройство для контроля параметров оконечной цифровой радиорелейной станции, содержащее последовательно соединенные переменный аттенюатор и первый элемент связи, вход которого является входом-выходом, контролируемой оконечной цифровой радиорелейной станции, первый и второй блоки коммутации, блок управления, выход которого подключен к управляющему входу второго блока коммутации, измеритель вероятности ошибки, второй элемент связи, выход связи которого соединен с первым входом первого блока коммутации, отличающееся тем, что, с целью повышения достоверности контроля, введены первый и второй генераторы, последовательно соединенные смеситель, первый и второй входы которого соединены соответственно с выходами первого и второго генераторов, и усилитель, выход, которого соединен с входом второго элемента связи, выход которого соединен с информационным входом переменного аттенюатора, последовательно соединенные измерительный приемник, информационный вход которого соединен с выходом первого блока коммутации, первый фильтр нижних частот, сумматор и видеорегенератор, выход которого соединен с первым входом второго блока коммутации, второй и третий входы и первый, второй и третий выходы которого соединены соответственно с выходом измерителя вероятности ошибки, с цифровым выходом контролируемой оконечной цифровой радиорелейной станции, с входом измерителя вероятности ошибки, модуляционным входом первого генератора и модуляционным входом контролируемой оконечной цифровой радиорелейной станции, выход связи первого элемента связи соединен с вторым входом первого блока коммутации, управляющий вход которого соединен с выходом блока управления, последовательно соединенные
30
35
40
45
50
55
715259288
генератор шума и второй фильтр нижних второй элементы связи выполнены в ви- частот, выход которого соединен с вто- де первого и второго направленных рым входом сумматора, причем первый и ответвителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров оконечной цифровой радиорелейной станции | 1991 |
|
SU1818699A1 |
| Устройство для контроля параметров ретранслятора цифровой радиорелейной линии | 1988 |
|
SU1566497A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ РАДИОПРИЕМНЫЙ УЗЕЛ | 2020 |
|
RU2746203C1 |
| Мобильная аппаратная система подвижной связи с повышенной защитой от воздействия помех | 2022 |
|
RU2794343C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2014 |
|
RU2556878C1 |
| Приемопередающий модуль полнодиапазонной радиорелейной станции | 2021 |
|
RU2768791C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ СОТОВОЙ СВЯЗИ | 2015 |
|
RU2577525C1 |
| МОБИЛЬНАЯ МНОГОКАНАЛЬНАЯ РАДИОПРИЕМНАЯ АППАРАТНАЯ | 2015 |
|
RU2582993C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СВЯЗИ МЕЖДУ ДВУМЯ РАДИОРЕЛЕЙНЫМИ СТАНЦИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2124810C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО ЦИФРОВЫХ СИГНАЛОВ | 1994 |
|
RU2090005C1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение достоверности контроля. Устройство для контроля параметров оконечной цифровой радиорелейной станции 18 содержит эл-ты связи, выполненные в виде направленных ответвителей 1 и 2, переменный аттенюатор 3, блоки коммутации 4 и 5, блок управления 6, измеритель 7 вероятности ошибки, усилитель 8, измерительный приемник 9, фильтры 10 и 11 нижних частот, г-р 12 шума, сумматор 13, видеорегенератор 14, г-ры 15 и 17 и смеситель 16. В режиме калибровки фиксируется вероятности ошибки. Если эта величина не превышает заданную, то устройство считается скалиброванным, после чего измеряют параметры станции 18. В режиме измерения вычисляется число ошибок. В случае если вероятность ошибки не превосходит заданной величины, то контролируемая станция 18 считается исправной, если нет - то неисправной. Величина отклонений реальных параметров от установленной в процессе калибровки величины вероятности ошибки определяется путем изменения уровня выходного сигнала г-ра 12 в большую или меньшую стороны, что соответственно позволяет определить запас энергетического потенциала или определить величину неисправности. 1 ил.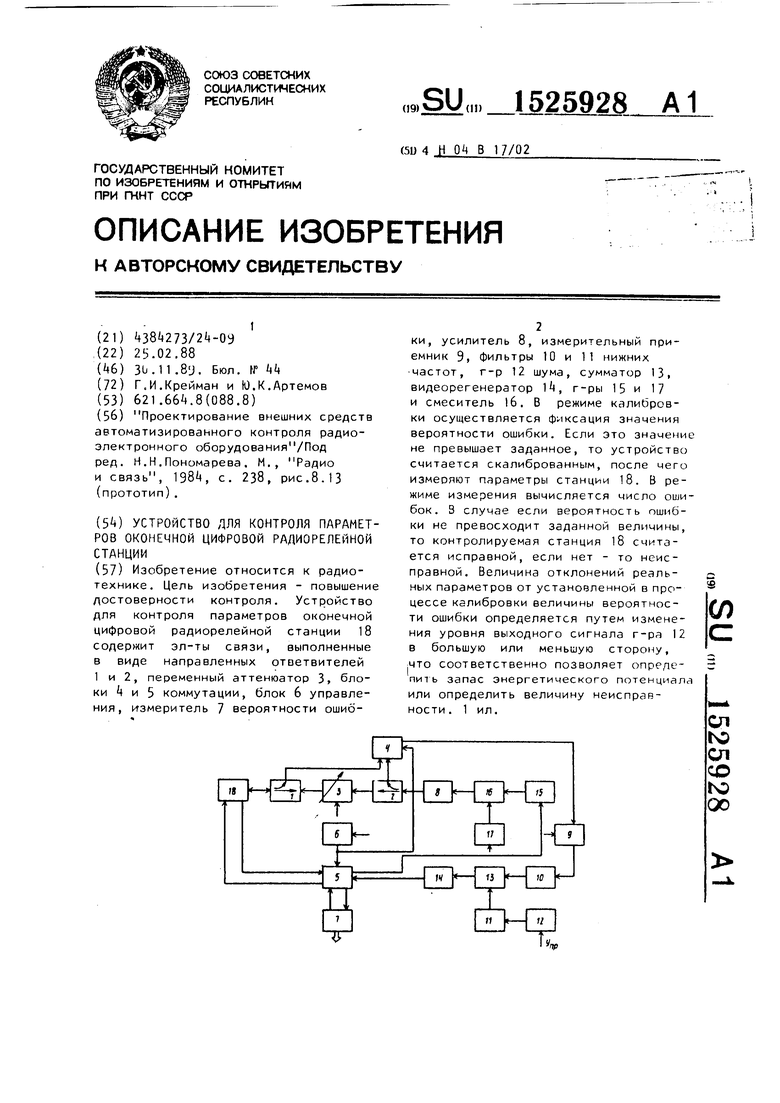
| Проектирование внешних средств автоматизированного контроля радиоэлектронного оборудования /Под ред | |||
| Н.Н.Пономарева | |||
| М., Радио и связь, , с | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
