Изобрете П1 1 относится к по сусковой сортировке минерального сырья, например горной массы угля, по уровню его естествешюп 1задиоактивности и может быть исноль.човано в горнорудной и угольной промыкшешюсти при настройке сепаратстрг.в.
Цель ичобрете-шя - повь} иение точности настройки путем осуществления возмояпости рлспоянавапия кусков с содержапяем рааиоактивньк компонентов ниже порогового значения.
Сущность способа заключается в следующем .
В зону контроля вводят с постоянным пагом смещения образец с высоким содержанием радиоактивных компонентов и имеющий вертикальный срез переднего края и.регистрируют отраженное излучеш е образца детектором при трех положениях образца: образец устанавливают по траектории движения передним краем на расстоянии не ближе, чем 1,5 шага смецения, от оси де
тектора; сдвигают образец передним краем в сторону оси детектора на неличину шага смещения; еще раз дпигаю образец передним краем в сторону оси детектора на величину шага смещения с перекрытием оси детектора на расстоянии не более 0,5 шага смещения, затем удаляют образец из зоны чувствительности детектора и регистрируют уровень фонового излучения, после чего определяют коэффициент потерь полезного сигнала из следующего соотношения :
2(п -по1
п ,+п
где п,, п,, п 3 - уровни отраженного излучения при последовательном пере- мещении образца вдоль оси детектора Пд - уровень фонового излучения.
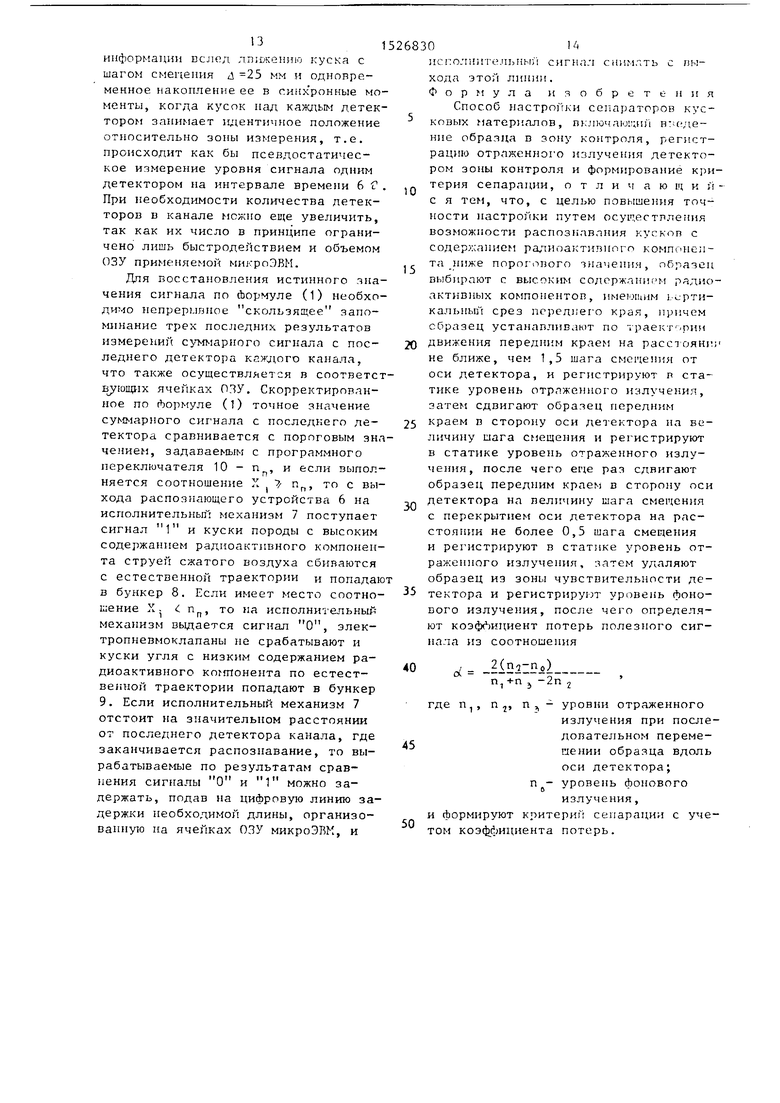
Па фиг.1 а,б приведен вариант рас- положе1П1я двух кусков с высоким уровнем радиоактивности и кусок 3 с уровнем ниже порогового; на фиг.2 - положения образца для определения точног значения d ; на Лиг.З - функциональ ная схема сепаратора, в котором може быть использован предлагаемьп способ настройки.
Это может быть способ свпара1Д1И, при котором происходит перемещение кусков материала с постоянной скоростью по траектории относительно нескольких детекторов, установленных на определенном расстоянии друг от друга, и регистрация уровня излучения калодым детектором за время такта измерения, равного отношению шага смещения, кратного расстоянию между детекторами, к скорости перемещения кусков материала, с суммированием сигналов, зарегистрированных каждым предшествующим детектором, с сигналом каждого последующего детектора в соответствуюпщх синхронных тактах измерения, запоминание результатов последовательных измерений суммарного сигнала, сравнение сигнала с пороговьц.1 значением, определение положения кусков материала в зоне разделения и разделение кусков по результатам сравнения в момент про- хождения над разделяющим устройством значе}1ие суммарного типа X., соответствующее i-му результату измере
ния суммарного сигнала п., определяют по предшествуюп;ему п и последующему п J4., результатам измерений суммарного сигнала из соотношения
х.(о(-и)п. .ii}jii).
«
5
5
0
5
0
где оС - коэффициент потерь полезного сигнала, определяемый с помощью образца материала с высоким содержанием радиоактивных компонентов и имеющего вертнкальньп : срез переднего края, который устанавливают на траектории дувижения передним. краем на расстоянии не ближе, чем 1,5 шага смещения от оси одного из детекторов, и измеряют в статике уровень сигнала п, этого детектора, затем сдвигают образец передним краем бляхе к оси детектора на величину шага смещения и измеряют уровень сигнала п, после чего еще раз сдвигают в сторону оси детектора на величину шага смещения с перекрытием оси детектора на расстояние не более 0,5 шага смещения и измеряют уровень сигнала Пд, после чего удаляют образец из зоны чувствительности детектора и измеряют уровень фонового сигнала п, а козфЛи- циент потерь полезного сигнала с/ определяют из соотношения
d 2(п,-Пд) /(n,-t-n э -.п) .
Совокупность отличительных признаков, состоящая в тог:, что значение суммарного сигнала X;, соответствующее i-му результату измерения суммарного сигнала п,, определяют по предшествующему nj, и последующему п . результатам измерений суммарного сигнала из соотношения
Х. ()п;- o((n.-fn ;,,)/2,
где о( - коэ ициент потерь полезного сигнала, создает необходимые условия для повышения эффективности сортировки за счет повышения точности распознавания малых кусков с пониженным содержанием радиоактивных компонентов, поскольку позволяет увеличить содержание полезной информации в i-M синхронном такте измерения и удалить из него инЛор- мацию, поступающую из соседних несинхронных тактов.
Сказанное иллюстрируется фиг.1а, где изображены два крупных куска 1 и 2 породы с высоким уровнем естественной радиоактивности и расположенный между ними небольшой кусок 3 угля с меньшим уровнем излучения. Поскольку размеры детекторов излучения обычно соизмеримы с продольными размерами сепарируемых кусков материала и за время такта измерения f кусок, движущийся со скоростью V, успевает сместиться над детектором на расстояние шага смещения л V- и, кроме того, регистрация излучения от куска или от частей куска (если продольный размер куска превышает значение Л начинается задолго до вхождения куска или его части в зону измерения, так как излучение от куска материала распространяется не только вниз на детектор, но и в разные стороны от куска, в т.ч. и на соседние детекторы, то эпюра уровня излучения, регистрируемая детектором как функция вре мени, представляет собой некоторую колоколообразную кривую с растянутыми хвостами, причем временные раяме- ры этой кривой существенно превышают время прохождения куска через зону измерения. Эпюры сигналов А и 5 от кусков породы и сигнал 6 от куска угля (фиг.1 б)имеют колоколообразную форму и в данном случае существенно пересекаются таким образом, что на эпюре суммарного сигнала 10 (фиг.1в) небольшой кусок 3 угля с малым свечением, заключенный межку кусками 1. и 2 породы с большим свечением, практически не выделяется.
Если принять пороговое значение п уровня разделения равным полусумме максимальных сигналов от куска породы и куска угля (фиг.16), то суммарный сигнал 10, регистрируемый детекторами при прохождении в зонах измерения группы кусков 1-3, бу.пет превышать пороговое значение п и кусок 3 угля, будучи распознанным как порода, потеряется. Если бы детектор излучения был высокочувстви- телы1ым, точечным и узкоколлимирован ным в вертикальном направлении, перпендикулярном плоскости перемещения материала (идеальный детектор), то эпюра уровня сигнала для данной группы кускоп имела бы вид трех хорошо выраженных прямоугольников 7-9
5
0
5
0
5
(фиг.16), геометрически расположенных над соответствующими кусками с четкими передними и задними фронтами, причем высота прямоугольника эпюры пропорциональна концентрации радиоактивных компонентоБ в соответствующей части куска.
На фиг.1а для упрощения шложения куски выбраны прямоугольной формы с равномерной концентрацией радиоак - тивных компонентов. При наличии идеального детектора куски угля, з.- .клю- ченные между кускапи породы, хорошо вьщелялись бы по пороговому уровню разделения п,,а положение кусков после их распознавания определялось бы четко выраженными передними и задними фронтами эппры сигналов от соответствующих кускоп. Предлагаемая совокупность отличительных иризгктков позволяет решить задачу восстановле- 1;ня идоальной Лормы эпюры сигнала по результатам следующих подряд непрерывных циклических измерений суммарного сигнала реальными протяженными детекторами во время движения кусков. Это попполит повысить эЛ- фективность и одновременно упростить процесс сортировки. Для восстановления идеальной Лормы эпюры сигналов необходимым условием восстановления
истинного значения сигнала X . в как1
дом i-M такте измерения является кроме измерения и запоминания результатов трех последовательных измерений
сигналов п
-1
п ; и П
определение
истинного значения ношению
сигнала по соот
Х.()п, -о(п, , )/2, (1)
где (у - коэффициент потерь полезного сигнала, равный по определению отношению суммарного сигнала, регистрируемого от дан}юго куска (или от данной части куска) во всех предшествующих и последуюсд1х несинхронньк тактах измерения, к сигналу, воспринимаемому детектором от данного куска (или от данной части куска) п синхронном такте, т.е. коэффициент of пропорционален отношению потерь сигнала, возникающих за счет его распространения вперед и назад по траектории движения куска, к полезному сигналу в синхронном такте измерения. Следует отметить, что чем ближе исиользуемьй детектор к идеальному и че.-ч мешлиим
выбрано время такта измерения, тем больше величина с/- коэффициента потерь ,
На фиг.1 в в качестве примера приведены эпюры реального 10 и восста- иогзленного по отношению (1) истинного значения сигналов 11-13 для различных значений о(4, ,5 и с 11. Как видно из эпюр, при of (кривая 11) фронты составляющих суммарного сигнала выделяются недостаточно ясно, при ,5 (кривая 12) гзосстанопленпая эппра практически идеальна, а при (кривая 13) происходит искажение реальноГ: картины эпюр составляющих вблизи фронтов сигна.1ов от кусков. Как видно из фиг.1в, при восстановлении происходит увеличение общего уровня сигналов от кусков за счет учета добавочного сигнала, содержащегося в несипхрО1П1ых тактах измерения, что требует соответствующего увеличения порогового значения уровня разделения, в нашем примере от значения п 110 до .
Таким образом, при восстановлении суммарного сигнала по соотношению (1) учитывается вся дополнительная информация, попадающая в несинхронные такты измерения и удаляется вся постороппяя информация из синхронных тактов измерения. Степень учета этой дополиптельной и посторонней информации определяется коэффициен- тo потерь с/. , При этом для - еткого восста1юплепия истино; ; Формы сигнала необходимо, кроме точного определения значения с, выбрать время такта измерения С таким образом, чтобы оно не превышало временрг прохождения мимо центра детектора половины куска минимального размера, так как в противном случае упадет разрешающая способность способа и не будут выделяться фронты сигналоп от минимальных кусков. При выполнении этого условия положение куска в зоне разделения можно определить по переднему и заднеьгу фронтам восстан11ллен него зна чения сигнала.
Совокуппость отличительных прия- н-аков, состоящая в том, что коэбЛи- пиент потерь полезного сигнала ci определяют с помощью образца материала с высоким содержанием радиоактивных KOhnioHGHTOB и и 5eющeгo вертикаль HLj срез переднего к;1ая, который ус
0
таиавливают по траектории движения передним краем на расстоянии не же, чем 1,5 шага смещения от оси одного из детекторов, и измеряют в статике уровень сигнала п-, этого детектора, затем сдвигают пбраяец передним краем ближе к оси детектора на величину шага CMeL ieiui5i и измеряют уровень сигнала п, noc:ie чего его еще раз сдвигают в сторопу оси детектора на вел чину шага (41ия с перекрытием оси детектора nri расстг яние не болеч 0,5 шага смеценич и измеряют уровеь ,, сигнала п, после чего удаляют образец из зоны чувствительности детектора и измеряют уровень гЬонового сигнала п, а коэффициент потерь тюлея- ного сигнала о определяют из соотношения
5
0
5
0
5
0 2(п2-По) / (п,+п 3-2п) ,
создает достаточные условия реализации цели предлагаемого техническогг решения - повьш1ения эффективности сортировки за с чет повьш:е1 ия точности распозпавания малых кусков с пониженным содержанием радиоактивных компонентов, так как по яоляр.т опредса;и | ь то единственное ч. , .ение коэг.Ьицге1Т1 ;.
0 -И - 1:оторОИ ПО СООТНО1ЧеНИЮ
(Г) ппсст 1 Ч:чьл ваетг.я без искажений исти11 1ое зь чеиие сигнала Б каждом i-M измерении.
Суьцность операций определения точного а состоит н том, что при отсутствии в зоне измерения кусков материала истинное значение сигнала в синхронном такте измерения должно равняться фоновому п, даже если и в непосредственной близости от зоны измерения расположен кусок с высоким содержанием радиоактивных компонентов. Следовательно, для трех последолательпых измерений и п,, из которых знасигнала п
1
п
чениям п и п соответствует птсутст- ;ша Kyci a (или части куска) в зоис изг-;ерс ;11Я, а значению п заполне- П1а частью куска зоны измерения, долило выполняться соотношение откуда из (1) получают:
Х,п
о
2(п --п,)/(п,+Пэ-2п„). (2)
Сказанное поясняется Лиг.2, где проиллюстрирована процедура опреде. ПИЯ точного значения f{ . оиа 1 измеренил представляет собой интервал длиной л, расположенный симметрично относительно оси 2 детектора 3 излучения. R положении фиг.26 образец с повышенным содержанием радиоактивного компонента, имеющий верти- кальньп срез переднего края, расположен передним краем непосредственно у грапи1Ц зоны измерения. Этому положению образца А соответствует измеренное значение сигнала п и восстановленное истинное значение Пр. Положениям фиг.2а,в, которые являются соседними несинхронными по отношению к положению Лиг.26 тактами измерения, соответствуют уровни сигналов п, и nj . Как видно, в положении фиг.2а образец на 0,5 иага смещения перекрывает ось детектора, а в положении фиг.2в отстоит от оси на 1,5 тага. Этим трем положениям образца соответствует восстановленное по соотношению (1) фоновое значение уровня сигнала в синхронном такте измерения при непосредственном расположении образца у границы зоны измерения, т.е. измеренные значения сигналов п,, п, позволяют по соотношению (2) получить такое единственное значение с/, по которому восстановленное значение сигнала по соотношению (1) позволяет наиболее точно и без искажений определить момент появления переднего фронта эпюры сигнала от образца, что является достаточным условием восстановления истинного значения уровн сигнала от куска или его части, находящихся в зоне измерения по соотношению (1). Это утверждение иллюстрирую зпюры восстановленного сигнапа при различных значениях с/, приведенные на фиг.1в. При о( 4 (эпюра 11), которое меньше точного значения ,5, определяемого по соотношению (2), происходит нечеткая фиксация переднего фронта эпюры сигнала от куска
1 и, как следствие, пониженное значение уровня сигнала от породы при о/ 11 (эпюра 13), которое превышает точное значение, происходит искажение уровня сигнала как фонового, так и от куска вблизи фронтов и, как следствие, завышенное значение восстановленного уровня сигнала от куска породы . При точном значении
о(7,5 эпюра восстановленного сигнала 12 имеет вид четкого прямоуголь
5
0
5
0
5
0
5
0
5
пика без искажения уровней сигналоп вблизи фронтон, что и является достаточным критерием посстанопления истинного уровня сигнала от куска .
Следует также отметить, что предлагаемая совокупность отличительных признаков кроме обеспечения необходимых и достаточных условий для реализации цели предлагаемого способа- повышения эффективности сортировки за счет повышения точности распознавания малых кусков с пониженным содержанием радиоа1стив}1ых компонентов - позволяет одновременно упростить реализацию способа путем исключения в ипвестном техническом решении дополнительных операций определения положения куска в зоне разделения с помощью соответствующих дополиительньк устройств. Р, предлагаемом техническом решении восстановление истинного уровня сигнала по отношению (1) попволяет определять положение кусков п зоне разделения по переднему и заднему Лронтам истинного значения суммарного сигнала, что исключает дополнительные операции непосредственно в зоне разделения и существенно упрощает реализацию способа.
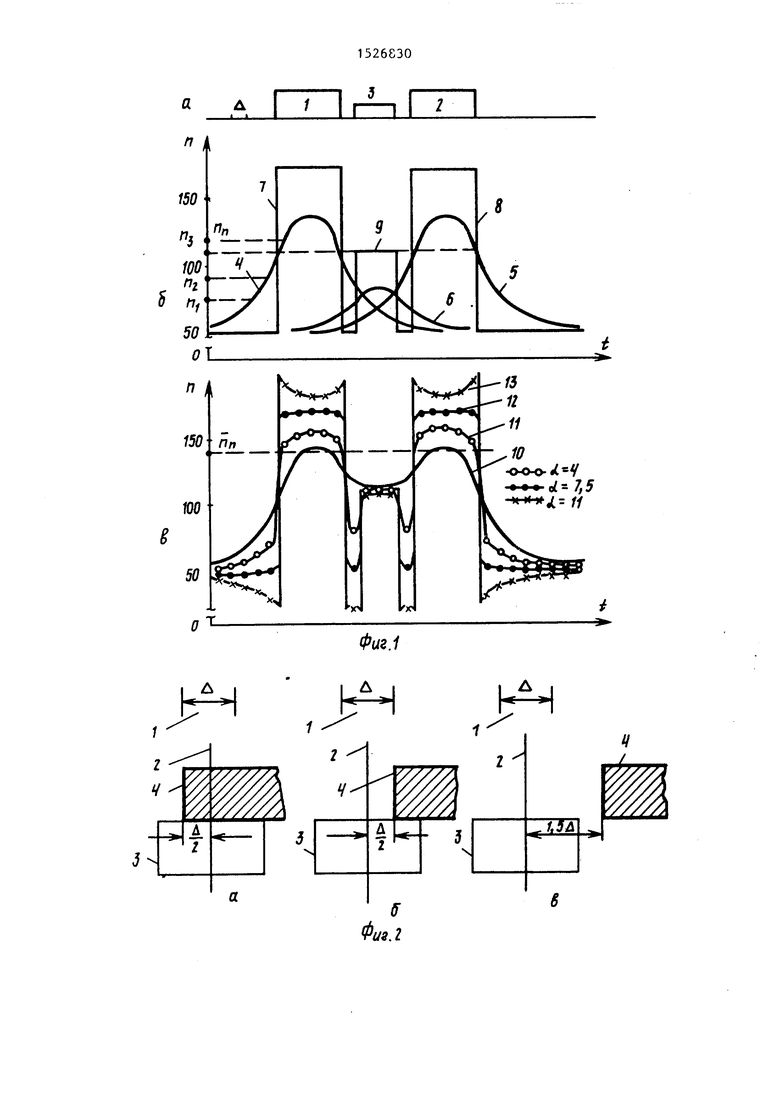
Реализация предложенного способа может быть осуществлена в устройстве, показанном на фиг.З.
Устройство состоит из бункера 1 с вибропитателем 2, ускоряющего конвейера 3, под лентой которого расположены, например, три канала по шесть детекторов 4 излучения в каждом ка-, нале. Детекторы 4 за1цищены от избыточного фонового излучения экраном 5 и их выходы подключены на входы блока 6 распознавания, выполненного на базе микроЭВМ, выходы которого подключены к исполнительным механизмам 7 (электропневматические клапаны), позволяю1дие разделять куски сортируемого материала в бункер 8 или в бункер 9. На входы блока 6 распознавания также подключены программные переключатели 10 для ввода значений коэффициента и пороговых значений уровней сигнала в каналах.
Детекторы 4 установлены вплотную друг к другу. Диаметр кристалла детектора излучения выбирают рапным средней длине куска сортируемого материала ( ми). Скорость
ленты конвейера V 300 мм/с. Время такта измерения уровня сигналов с выбирают равным отношению половины минимальной длины куска к скорости и движения ленты. f 0,5 0,5-60/300 0,1 с, следовательно за один такт измерения кусок сместится па расстояние нага смешения, равное 300.0, Г1М. 1-;аг смещения должен быть кратным расстоянию ме}кду центрами детекторов мм для обеснечения синхронного дискретного перемецения информации в блоке 6 распознавания и непрерывного движения куска на ленте. Поэтому в качестве шага смешения выбирают ближайшее значение л , меньшее расчетного н кратное 1). Это значение 25 мм и соответствующее время .такта измерения i ,0833 с являются параметрами устройства.
Перед началом работы устройства определяют коэсЬйициент потерь полезного сигнала с/ , для чего прямоугольный кусок породы с высоким содержанием радиоактивного компонента (Лиг.2) устанавливают передним краем на расстоянии 1,5 ,5 мм от оси детектора и в статике измеряют уровень сигнала . Яатем передвигают кусок на расстояние /О 25 мм ближе к оси детектора и вновь измеряют уровень сигнала ,5. После этого еще раз передвигают кусок на расстояние по направлению к оси детектора и измеряют уровень сигналя, п,,, 119. Затем убирают кусок из зонь: чувствительности детектора и измеряют уровень бонового сигнала , После чего по формуле (2) определяют величину коэе ициента :
)
п ,+п
7,5
Полученное значение d устанавливают на программном переключателе 10.
Пороговое значение уровня сигнала п, определяют как пoлycy ry уровней сигналов от куска угля и куска породы средних размеров, устанавливаемых в зоне измерения детектора, на котором производится измерение. В данном случае зоной измерения является интервал длиной ,5 см вдоль направления движения, расположенный симметрично относительно оси детектора. ПаГщенное значение также устанавливается на соответству101чем программном перек;иочателе 10.
Устройство работает следующим образом.
Гуски породы н угля из бункера 1 поступают на вибропитатель 2 и с его помощью раскладываются по трем каналам на конвейерной ленте 3. Сигналы с детекторов А, за1чищенн1.1х от избыточного фонового излучения экраном
5непрерывно nociyiiaiDT на вход блока
6распознавания, г/ю Б течение времени такта измерения Г суммируются в
J соответствующих ячейках ОЯУ микроЭВМ. Суммирование сигналов происходит непрерывно .вне зависимости от наличия или отсутствия кусков на ленте, а время начала очередного такта измере0 ния никак не синхронизируется с моментами вхождения кусков в зоны измерения детекторов. По окончании времени такта измерения (куски материала на ленте за это время сместятся
5 на расстояние 4 Vf шага смещения) происходит прерывание измерительного цикла и сдвиг содержимого ячеек ОЗУ в направлении возрастания номеров детекторов на одну ячейку: ОЯУ, соответствующие первь м номерам дртек- торов каналов, оОпуаяются и измерительный цикл вновь возобновляется. Каждо у такту единичного цикла измерения в каждом канале соответствует своя информационная ячейка ОЗУ, благодаря чему происходит дискретное перемещение информации в ячейках ОЗУ синхронно вслед непрерывному движению кусков по конвейерной ленте. Поскольку расстояние между центрами детекторов D-100 мм больше длины шага смещения Д 25 мм в четыре раза (требование кратности Вил должно выполняться для обеспечения строгой синхронности движения кусков по ленте и информации из ОЗУ), то суммирование сигналов с детекторов должно производиться в каждую четвертую ячейку информационней дорожки ОЗУ, соответствующей данному каналу. Например, если первому по ходу двюкения куска детектору соответствует ячейка ОЗУ, в которую производится суммирование сигнала, с номером О, то второму по ходу движения детектору - ячейка с номером 4, третьему - В, ...шестому - 20. Следовательно, информационная дорожка, содержащая 21 ку ОЗУ, обеспечит синхро ;ньы перенос
0
5
0
5
0
13
информации вслед лшжению куска с шагом смег{ения л 25 мм и одновременное наконление ее в синхронные моменты, когда кусок над кащтым детектором занимает идентичное положение относительно зоны измерения, т.е. происходит как бы псевдостатическое измерение уровня сигнала одним детектором на интервале времени 6 f При 1 еобходимости количества детекторов в канале можно еще увеличить, так как их число в принципе ограничено лишь быстродействием и объемом ОЗУ приме няемой микроЗВМ.
Для восстановления истинного значения сигнала по Лормуле (1) необходимо непрерыгзное скользящее запоминание трех последних результатов измерений суммарного сигнала с последнего детектора Кг.ждого канала, что также осуществляется в соответствующих ячейках ОЗУ. Скорректированное по Лормуле (1) точное значение суммарного сигнала с последнего детектора сравнивается с пороговым значением, задаваемым с программного переключателя 10 - п, и если выполняется соотношение X п, то с выхода распознающего устройства 6 на исполнительный механизм 7 поступает сигнал 1 и куски породы с высоким содержанием радиоактивного компонента струей сжатого воздуха сбиваются с естественной траектории и попадаю в бункер 8. Если имеет место соотно1
шение
1
i п
п
то
на исполни1 ельныя
механизм выдается сигнал О, элек- тропневмоклапаны не срабатывают и куски угля с низким содержанием радиоактивного коггпонента по естественной траектории попадают в бункер 9. Если исполнительный механизм 7 отстоит на значительном расстоянии от последнего детектора канала, где заканчивается распознавание, то вырабатываемые по результатам сравнения сигналы О и 1 можно задержать, подав на цифровую линию задержки необходимой длины, организованную на ячейках ОЗУ микроЭВК, и
т10
15
268301
исполиителтзны; сигнп.-i саимлть с хода этой линии.
Формула изобретения Способ настройки сепараторов кусковых иатер 1алов, включаю; ;и11 пти де- ние образца в зону контроля, регистрацию отраженного излучения детектором зоны контроля и формирование критерия сепарации, о т л и ч а ю щ и й- с я тем, что, с целью повышения точности настройки путем осущестлления возможности распоз1 авлния кусков с содер :;а1И5ем радиоактивного компчнсл- та ниже порогового значения, образец выбирают с высоким содсржанигп- радиоактивных компонентов, имеющим ьс:рти- кальный срез переднего края, причем образец устанавливают по ч раект -рии движения передним краем на расстояни; не ближе, чем 1,5 шага смс1 1ения от оси детектора, и регистрируют в статике уровень отраженного излучения, затем сдвигают образец передним краем в сторону оси детектора на величину шага смещения и регистрируют в статике уровень отраже}шого излучения, после чего еще раз сдвигают образец передним краем в сторону оси детектора на величину шага смещения с перекрытием оси детектора на расстоянии не более 0,5 шага смещения и регистрируют в статике уровень отраженного излучения, затем удаляют образец из зоны чувствительности детектора и регистрируют уровень фонового излучения, после чего определяют коэфЛициент потерь полезного сигнала из соотношения
20
25
30
35
40
- 2i }2ll}.
п, +п ;. -2п
где п
1
7
п 5
0
уровни отраженного излучения при последовательном переме- иении образца вдоль оси детектора; уровень фонового излучения,
и формируют критерий сепарации с учетом )ициента потерь.
п /7
/50

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки радиометрического сепаратора горной породы | 1988 |
|
SU1839115A1 |
| Способ настройки сепаратора кусковых материалов | 1990 |
|
SU1791037A2 |
| Способ сепарации полезных ископаемых и устройство для его осуществления | 1980 |
|
SU995884A1 |
| Способ сепарации кусковых материалов | 1980 |
|
SU939086A1 |
| Способ настройки радиометрического сепаратора покусковой сортировки минерального сырья | 1987 |
|
SU1509135A1 |
| Устройство для автоматической сорбировки кускового материала | 1989 |
|
SU1697906A2 |
| Способ рентгенолюминесцентной сепарации руд и устройство для его осуществления | 1988 |
|
SU1570777A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОЛЬШИХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ВЫСОТ | 1993 |
|
RU2072530C1 |
| Устройство для сепарации кускового поликристаллического минерального сырья | 1988 |
|
SU1694249A1 |
| Способ градуировки радиометрических золомеров для вагонов | 1990 |
|
SU1823925A3 |
Изобретение относится к покусковой сортировке минерального сырья по уровню его естественной радиоактивности, может быть использовано при настройке сепаратов и позволяет повысить точность настройки путем осуществления возможности распознавания кусков с содержанием радиактивных компонентов ниже порогового значения. При этом определяют коэффициент потерь полезного сигнала. Для этого образец материала с высоким содержанием радиоактивных компонентов, имеющий вертикальный срез переднего края, устанавливают по траектории движения передним краем на расстоянии не ближе чем 1,5 шага смещения от оси одного из детекторов и измеряют в статике уровень сигнала N1 этого детектора. Затем сдвигают образец передним краем ближе к оси детектора на величину шага смещения и измеряют уровень сигнала N2. Далее образец еще раз сдвигают в сторону оси детектора на величину шага смещения с перекрытием оси детектора на расстоянии не более 0,5 шага смещения и измеряют уровень сигнала N3, после чего удаляют образец из зоны чувствительности детектора и измеряют уровень фонового сигнала N0, а коэффициент потерь полезного сигнала определяют из соотношения α=2(N2-N0)/(N1+N3-2N2). 3 ил.
А
-ii
I
ТТЛ
N
f
Фи9.г
/
5
CZ5 ffS
мшши
fe.J
| Лзаряп Л.Л | |||
| и др | |||
| Устройство для настройки измерительных блокоп радиометрического сепаратора | |||
| - Известия Ry-ioii, Горный журнал, 1981, С 12, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
