J
(21)4321055/24-10
(22)09.07.87
(46) 07.12.89. Бюл. 45 (75) Л.А. Овчинников
(53)528.422.024.5(088.8)
(56)Патент Великобритании № 1305355, Альтиметр. - Изобретения за рубежом, 1973, № 2.
; Селеэнев В.П. Навигационные устройства. - М.: Оборонгиз, 1961, с. 209.
Нраславский Д,А. и др. Авиационные приборы. М.: Машиностроение, 1964, с. 273-289.
(54)БАРОМЕТРИЧЕСКИЙ ДАТЧИК ВЫСОТЫ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА
(57)Изобретение относится к авиационному приборостроению и позволяет упростить устройство, одновременно повысив точность измерений. Статическая характеристика анероидного,блока коробок выполнена линейной по высоте, что превращает датчик давления. в задатчик высоты. Изменение радиуса кулачка 5, жестко соединенного с выходным валом следящей системы, приходящееся на единицу его угла поворота, выполнено в пределах угла поворота, соответствующего первому поддиапазону малых высот, и большим, чем изменение радиуса кулачка н пределах Еторого поддиапазона измерения высоты. В состав барометрического датчика высоты дополнительно введены узел формирования поддиапазонов, узел формирования переключений, узел совмещения электрических нулей выходных элементов следящей системы с их механическими нулями и дополнительный блок управления и индикации, В блок усиления дополнительно введены измерительный ключ и операционный усилитель, вьтолненный на интегральной схеме и работаюпщй в режиме сумматора. 1 с.п. и 5 з,п. ф-лы, 3 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОБАРОГРАФ | 1992 |
|
RU2029933C1 |
| Устройство для защиты от токов утечек в трехфазной сети с изолированной нейтралью | 1973 |
|
SU603042A1 |
| ДАТЧИК СТАТИЧЕСКОГО И ПОЛНОГО ДАВЛЕНИЙ | 2020 |
|
RU2762543C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| ПРИВОД ДЛЯ ВРАЩЕНИЯ РАБОЧЕГО ОРГАНА В СПОСОБЕ И УСТРОЙСТВЕ ДЛЯ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ | 2000 |
|
RU2255641C2 |
| КОРРЕКТОР ГАЗОВОГО СЧЕТЧИКА | 1971 |
|
SU315938A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 1995 |
|
RU2115932C1 |
| Микробарограф | 1987 |
|
SU1413450A1 |
| Микробарограф | 1979 |
|
SU847090A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ЦЕННЫХ БУМАГ, ИМЕЮЩЕЕ НИЗКОЕ ПОТРЕБЛЕНИЕ ЭНЕРГИИ | 2003 |
|
RU2285295C2 |
Изобретение относится к авиационному приборостроению и позволяет упростить устройство, одновременно повысив точность измерений. Статическая характеристика анероидного блока коробок выполнена линейной по высоте, что превращает датчик давления в задатчик высоты. Изменение радиуса кулачка 5, жестко соединенного с выходным валом следящей системы, приходящееся на единицу его угла поворота, выполнено в пределах угла поворота, соответствующего первому поддиапазону малых высот, большим, чем изменение радиуса кулачка в пределах второго поддиапазона измерения высоты. В состав барометрического датчика высоты дополнительно введены узел формирования поддиапазонов, узел формирования переключений, узел совмещения электрических нулей выходных элементов следящей системы с их механическими нулями и дополнительный блок управления и индикации. В блок усиления дополнительно введены измерительный ключ и операционный усилитель, выполненный на интегральной схеме и работающий в режиме сумматора. 1 с. и 5 з.п. ф-лы, 4 ил.
Изобретение относится к авиационному приборостроению.
Целью изобретения является уменьшение уровня погрешностей выработки сигналов высоты, особенно в диапазоне малых высот, и облегчение введения поправки на изменение давления у Земли при упрощении общей схемы устройства.
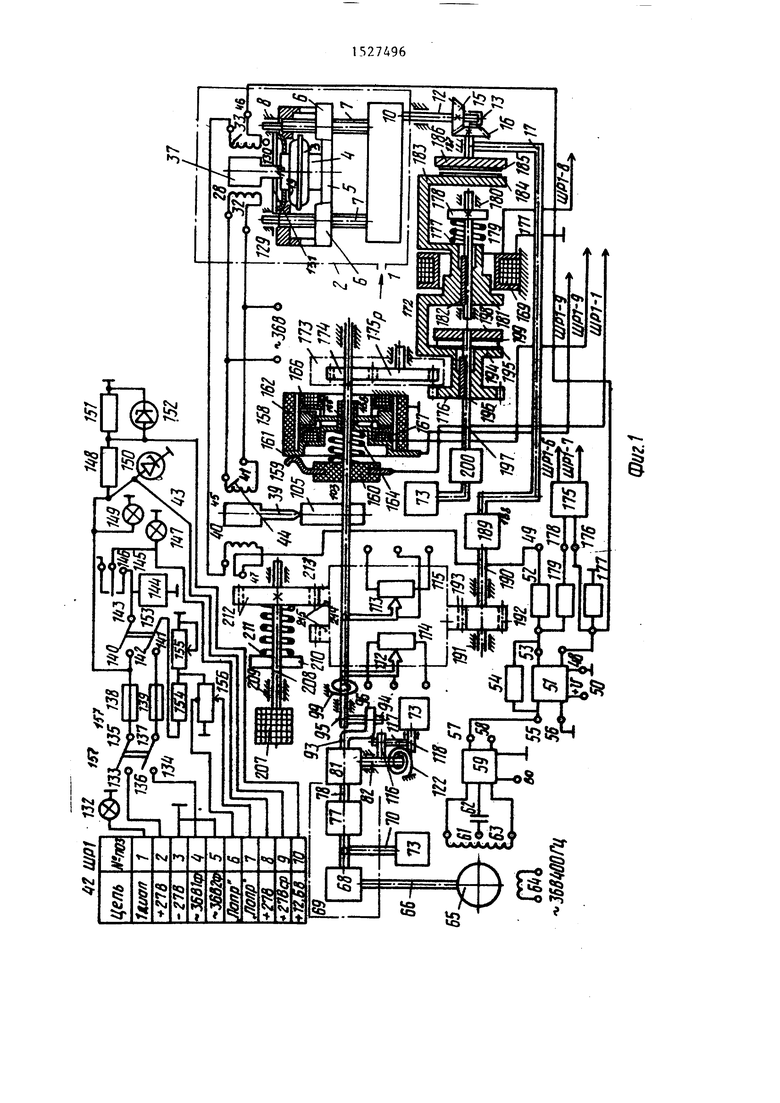
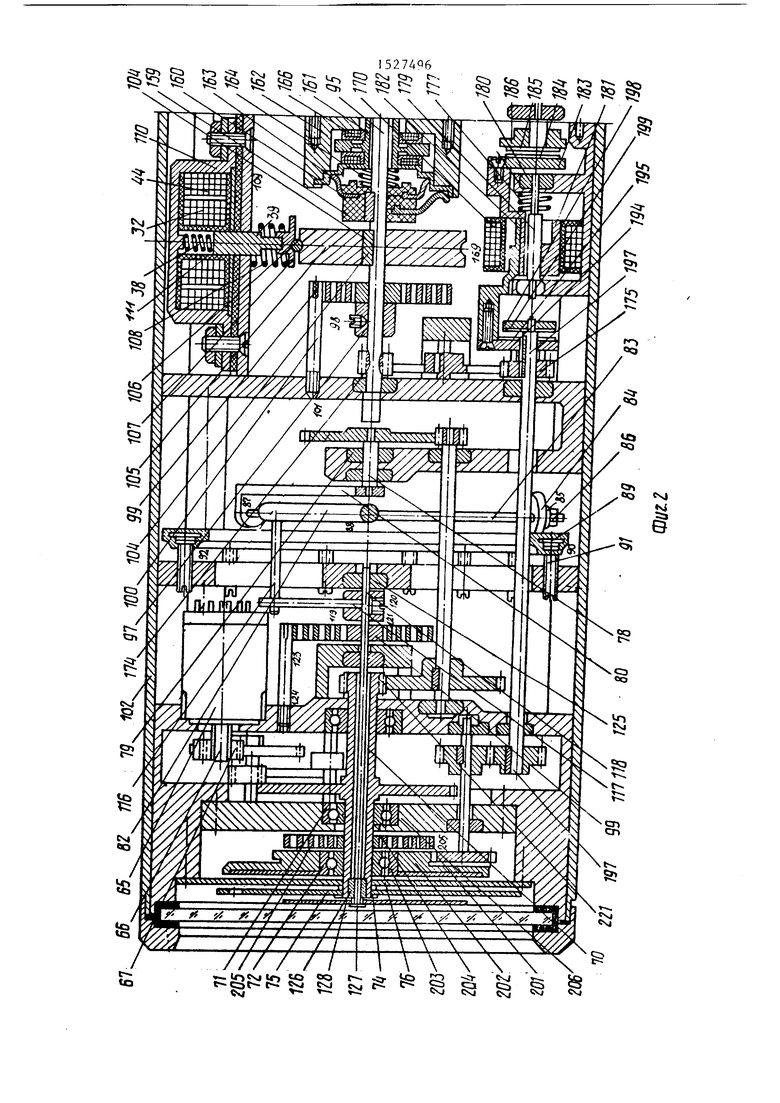
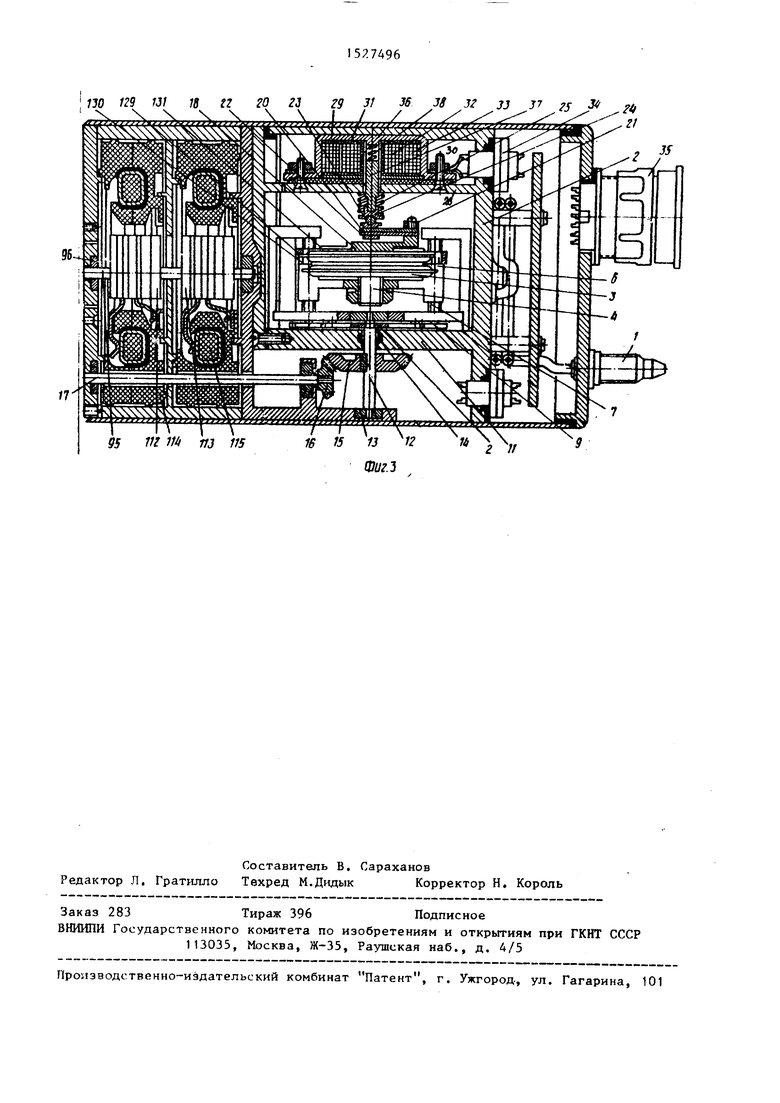
На фиг. 1 приведена злектрокинема- тическая схема датчика; на фиг.2 и 3 - конструкции датчика.
Статическое давление, воспринимаемое каналом статического давления
приемника воздушного давления (ПВЛ), подается через связанный с ним герметично трубопровод в штуцер 1 и далее в герметичный корпус 2 задатчика высоты (первый вход первичного преобразователя). Это давление воспринимается анероддным блоком коробок 3, нижний жесткий центр которого 4 жестко закреплен к платине 5, выполненной в виде крестовины с центральным отверстием, на периферийных концах которой жестко закреплены гайки 6, соединешд 1е с вертикально размещенными винтами 7 по так, что ось
чувствительности анероидного блока коробок 3 и винтов 7 параллельны. Винты вращаются в опорах 8, а на их нижней оконечности жестко насажены выходные зубчатые колеса 9 первого редуктора 10 (фиг„3), входное зубчатое колесо 11 которого жестко насажено на вал 2, вращающийся в опорах 13, Вал 13 герметично введен в задатчик высоты с помощью сальника 14 (фиг.З), а на его свободном конце жестко насажено коническое колесо 15, являющееся вторым входом первичного преобразователя, сцепленное зубьями с вторым коническим колесом 16, пред- С1авляющим собой четвертый дополнительный блок преобразования. Это колесо жестко насажено на торце вала 17, являющегося вторым выходом блока коррекции изменения давления у Земли.
Верхний жесткий центр 18 анероидного блока коробок 3 жестко присоединен своей нижней торцевой поверхнос- тью к плоскому центру верхней гофрированной мембраны 19, снабженному биметаллическим компенсатором 20 |(фиг.2 и 3, узел температурной ком- пенсации), один конец которого жест- ко, но с возможностью регулировки, закреплен в вертикальной стойке верхнего жесткого центра 18 анероидного блока коробок 3, винтом 21, а на свободном конце биметаллического компен- сатора шарнирно с осью шарнира, проходящего в плоскости спая биметаллов, закреплена втулка с цилиндрическим отверстием, окружающим боковую поверхность биметалла с зазором 22, верх- няя боковая поверхность которой выполнена плоской с центральным углублением, выполненным по радиусу, в которое заложен металлический ша- рик 23, соприкасающийся верхней боко- вой поверхностью с аналогичным шаровым углублением в нижней плоской торцевой поверхности цилиндрической втулки 24, снабженной в нижней части боковой поверхности плоским цилинд- рическим буртиком, на который опирается одним концом витая цилиндрическая пружина 25, другой конец которой опирается в горизонтально расположенное плоское основание 26, жестко связамное с корпусом 2 первичного преобразователя, на котором жестко через прокладку 27, выполненную из изоляционного материала, например гетинакса, закреплен первый магнитоиндук- ционный датчик 28, полый цилиндрический корпус 29 которого, снабженный сверху плоским дном, имеющим центральный цилиндр малых радиуса и высоты с нижней внутренней торцевой поверхности, играет роль магнитопрово- да и жестко закреплен к плоскому основанию 26 винтами 30. В полости, образованной внутренней поверхностью корпуса 29 индукционного датчика 28 и плоской поверхности основания 26, размещена цилиндрическая катушка 31 о полым цилиндрическим корпусом и горизонтально расположенными по его торцам плоскими цилиндрическими щечками, внутри которой намотаны первичная 32 и вторичная 33 обмотки, концы которых выведены за пределы корпуса 29 первого индукционного датчика 28 и через контакты дополнительного штепсельного разъема 34, герметично введенного в корпус 2 первого индукционного датчика 28, выведены за его внутренние пределы, а этих выводов распаяны на соответствующие контакты первого штепсельного разъема 35 барометрического датчика высоты. Катушка 31 своим нижним плоским цилиндрическим основанием опирается на плоское цилиндрическое основание полой цилиндрической катушки 36, вложенной в цилиндр катушки 31 о Во внутренней полости катушки 36 по посадке движения размещен первый цилиндрический сердечник 37, выполненный из магнитопроводящего материала, например пермаллоя, первого индукционного датчика 28 таким образом, что между его верхним плоским основанием и таким же основанием верхнего торца корпуса 29 первого индукционного датчика 28 имеется зазор, в котором размещена вторая витая цилиндрическая пружина 38, а нижний конец первого цилиндрического сердечника 37 выполнен цилиндрическим меньшего радиуса, чем радиус.сердечника, боковая поверхность которого запрессована в соответствующее центральное цилиндрическое углубление, выполненное в верхней части тела втулки 24, Такая конструкция задатчика высоты обеспечивает упругожесткую связь между верхним жестким центром 18 анероидного блока коробок 3 и первым сердечником 37 первого индукционного датчика 28, обеспечивая
демпфирование колебаний сердечника 3 при различных возмущениях. Материал катушки 36 выбирается с малым коэффициентом трения в паре с материалом первого цилиндрического сердечника 27.
Таким образом, первый цилиидричес кий сердечник 37 первого индукционного датчика 28 свободно перемещается в воздушном зазоре, образованном полостью катушки 36 о Аиероидный блок коробок вьтолняют со статической характеристикой, функционально зависящей от высоты, являющейся линейной по высоте в частном случае. Это и превращает задатчик давления известного устройства в задатчик высоты барометрического датчика высоты При нахождении датчика на Земле статичес кое давление максимально, анероидный блок коробок 3 максимально сжат, а торец первого цилиндрического сердечника 37 находится в нижней части воздушного зазора первого индукцион- ного датчика 28. С подъемом на высоту статическое давление падает, аке- роидный блок коробок 3 разжимается и торец первого сердечника 37 поднимается вверх, сокращая расстояние между собой и торцом крышки корпуса 29 первого индукционного датчика, В равновесном состоянии (постоянство высоты ) второй сердечник 39 второго индукционного датчика 40, аналогич- ный перво.му сердечнику 37, занимает в воздушном зазоре второго индукционного датчика такое же положение, что и первый сердечиик 37 в магнитопрово- де первого индукционного датчика 37. На магнитопроводах первого 28 второго 40 индукционных датчиков намотаны первичные соответственно 32 и 41 обмотки, включенные обоими концами согласно друг по отношению к другу и подключенные к соответсгвующим фазам источника переменного напряжения 36 В частоты 400 Гц, снимаемых с соответствуюцих выходов второго штепсельного разъема 42 блока 43 уп- равления и индикации, и вторичные обмотки соответственно 33 и 44,включенные друг по отношению к другу встречно так, что одни их концы, об- раэуюцие первые выхода первичного преобразователя и блока 45 преобразования, содержащего второй индукционный датчик 40, соединены между собой, а другие конщ11, образующие соответственно вторые выходы первичного преобразователя 46 и блока 47 преобразования, присоединены соответственно к первому 48 и второму 49 входам дополнительного блока 50 обработки. Первы вход 48 блока 50 совпадает с первым входом сумматора 51, второй вход 49 блока 50 через первый резистор 52 соединен с вторым входом 53 сумматора 51, который через второй резистор 54 соединен с первым выходом 55 сумматора 51, второй выход которого 56 заземлен. Первый 55 и второй 56 выходы сумматора 51 соединены с соответственно первым 57 и вторым 58 входами усилителя 59 следящей системы, имеющего каскад усиления по напряжению и каскад усиления по мощности, являющимися соответственно первым и вторым входами блока 60 обработки. Первый выход усилителя 59 следящей системы соединен с первым выводом первой полуобмотки 61 управления, второй вывод которой через конденсатор 62 соединен с вторьи выводом усилителя следящей системы 59, третий выход которого соединен с одним концом второй полуобмотки 63 управления, другой конец которой соединен с вторым концом первой полуобмотки 61 управления, обмотка 64 возбуждения двигателя 65 своими выводами соединена через соответствующие контакты второго штепсельного разъема 42 блока 43 управления и индикации с источником переменного напряжения 36 В частоты 400 Гц. Зубчатая шестерня выходного вала 66 двигателя 65 соединена с ведущим цилиндрическим зубчатым колесом 67 первой ступени 68 редуктора 69 следящей системы. Выходной вал 70, вьтолненный в виде полой цилиндрической оси, свободно вращающейся в опорах 70 и 72 (фиг.2), является первым выходом блока 60 обработки и первым входом блока 73 индикации, выполненным в виде пары футер 74 - стрелка 75, жестко насаженной на валу 70 указывающей высоту относительно оцифг- рованных делений в сотнях метров, вьтолненных на неподвижной шкале высот 76. Вал 70 является также входным валом для второй ступени 77 редуктора 69 следящей системы, выходом которой, совпадающим с вторым выходом блока 60 обработки, является вал 78, свободно вращающийся в опорах 79 (фиг.2),-на одном свободном
конце которого, выполненном в виде цилиндра меньшего радиуса, чем радиус вала, жестко насажено водило 80 блока 81 коррекции конструктивных ошибок устройстна, являющееся входом этого блока.
Блок 8 коррекции конструктивных ошибок устройства состоит из водила 80 (фиг..), выполненного в пиде плоской симметричной относительно сквозного центрального отверстия, которым оно жестко нагажено на вал
78, имеюрдего с двух торцевых сторон перпендикулярно отогнутые плоские У1ГКИ, параллельные друг другу, в ко- тооых выполнены соосные центральные c вoэныe отверстия, в которые запрессованы соответствующие опоры в виде цилиндрических втулок с центральным сквозным цилиндрическим отверстием, боковая поверхность которых сопряжена по посадке скольжения с боковой поверхностью цапф промежуточного вала 82, имеющего в нижней части боковой поверхности цилиндрическое отверстие, ось которого проходит перпендикулярно оси вала 82 и продольной оси прибора, в которое запрессована торцевая боковая поверхность цилиндрической штанги 83, на свободном конце которой на цапфе свободно вращается цилиндрический ролик 84, перемещение которого вдоль штанги 83 ограничено парой шайба 85 - гайка 86, навинченной на резьбу, выполненную на свободном конце штанги. На торцевых поверхностях вала 82 размещены первая и вторая маломоментные спиральные пружины соответственно 87 и 88, одни концы которых жестко соединены с валом 82, а другие - с води- лом 80, Эти спиральные пружины обеспечивают постоянное соприкосновение боковой поверхности ролика 8А с боковой поверхностью плоской ленты 89, вьтолненной в виде неполной цилиндрической полосы прямоугольного сече- иия, размещенной в аналогичной формы лентодержателе 90, в котором расположены симметрично друг относительно друга отверстия с центрами, расположенными на окружности, в которые продеты торцы винтов 91, свободно вра- щаюпщеся вокруг оси, но жестко закре ленные к ленте в отношении продольного перемещения, другие конщ.1 которых вьтолнены со шлицом, а винты ввинчены в соответствующие отверстия с рез
бой, выполненные в теле плоской верти- расположенной платы 92 с центрами, расположенными на окружности, так что ввинчивание и вывинчивание винтов 91 друг относительно друга приводит к изгибанию ленты 89 и переменному по углу поворота вала 78 углу поворота вала 82 блока 81 Первым выходом блока 81 является поводок 93, один конец которого жестко закреплен на валу 82 так, что era продольная ось параллельна продольной оси прибора, но не проходит через эту ось, соприкасающийся боковой поверхностью с вторым поводком 94, выполненным в вида цилиндра, один конец которого жестко соединен с валом 95, свободно вращающимся в опорах 96 так, что его продольная ось проходит перпенди-. кулярно оси вала 95, на котором с помощью втулки 97, жестко прикрепленной на валу 95 винтом 98, жестко прикреплен один конец третьей маломо- ментной спиральной пружины 99, другой конец которой жестко защемлен в торцевой щели винта 100, ввинченного в отверстие с резьбой, выполненное в теле вертикально расположенной платы 101, жестко закрепленной в корпусе 102 барометрического датчика высоты (фиг.2). Пружина 99 обеспечивает постоянное силовое замыкание поводков 93 и 94, обеспечивая передачу вращения от двигателя следящей системы 65 на вал 95, являющийся первым входом блока выходных элементов 103, блока 45 преобразования, блока квр- рекции изменения давления у Земли. На валу 95 жестко с помощью шпонки 104 закреплен кулачок 105, имеющий переменный радиус и дорожку, вьтол- ненную по радиусу на боковой цилиндрической поверхности кулачка 105, на которой в верхней части дорожки продольного разреза размещен второй шарик 106, соприкасающийся сверху с аналогичной шаровой поверхностью, выполненной в торцевой поверхности втулки 107, имеющей снизу плоский цилиндрический буртик, на верхнюю торцевую поверхность которого опирается витая цилиндрическая пружина
108,другой конец которой упирается в нижнюю поверхность плоского горизонтально расположенного основания
109,на котором жестко закреплен корпус 110 второго индукционного датчика 40, аналогичного первому индук9
нионному датчику 28, В центральном вертикально расположенном отверстии цилиндрической втулки 111 по посадке движения может свободно перемещаться второй цилиндрический сердечник 39, аналогичный первому сердечнику 37, нижний конец которого выполнен в виде цилиндра меньшего радиуса, чем радиус сердечника, и запрессован в центральное цилиндрическое несквоэ- ное отверстие, выполненное со стороны верхней торцевой поверхности втулки 107 по продольной оси симметрии втулки, совпадающей на продольном разрезе (фиГо2) с вертикальной осью чувствительности второго индукционного датчика 40.
При изменении высоты, а следовательно статического давления, анеро- идный блок коробок претерпевает линейное перемещение, вызывающее различное перекрытие по высоте первым 37 и вторым 39 сердечниками воздушных зазоров магнитопроводов первого 28 и второго АО индукционных датчиков. Вследствие этого во вторичных обмотках 33 и 44 первого 29 и второго 40 индукционных датчиков возникают различные электродвижущие силы, приложенные навстречу друг другу таким образом, что разностная электродвижущая сила, приложенная к входам 48 и 49 дополнительного блока обработки, вызывает появление на выходах усилителя 59 следящей системы появление напр51жения такой фазы, которое, будучи приложенным к первой 61 и второй 63 полуобмоткам управления двигателем 65, вызывает его вращение в сторону, уменьиающую рассогласование положений первого 37 и второго 39 сердечников в воздушном зазоре магнитопроводов первого 28 и
152749610
женив с помощью втс рого погюдка 94 на вал 95, на котором жестко сидит кулачок 105 цепи обратной связи сле дящей системы. Таким образом происх 5
дит внесение поправок на конструкти ные погрешности системы с помощЪю блока коррекции конструктивных ошиб устройства. На валу 95 жестко наса- 10 жены роторные узлы 112 и 118 первог 114 и второго 115 выходных элементо датчика, например потенциометров, сельсинов и т,,г,, вырабатывающих электричрские сигналы, являющиеся 15 функцией высоты полета,
Особенностями блока 81 коррекции конструктивных ошибок устройства яв ляется размещение этого блока в цеп на границе прямой и обратных связей 20 следящей системы, что позволяет ко ректировать конструктивные погрешности не только в информации выходн элементов, но и в информации самой следяшеГ- системы как таковой; введе 25 ние второго канала измерения в одно блоке коррекции, осуществленного вв дением второго поводка 116, один ко нец которого жестко закреплен на другой стороне вала 82, сиг-метрично 30 расположенном продольной оси прибор и разметен1-по первого поводка 93 кор- рекционного устройства 81, соприкасаясь боковой поверхностью с поводком 117, другой конец которого жестко закреплен в теле вала 118с помощью втулки 119 и винта 120, на котором с помощью втулки 121 жестко закреплен к валу 118 один конец четвер той маломоментной спиральной пружи- 40 ны 122, другой конец которой жестко защемлен в продольной прорези винта 123, ввинченного в отверстие с резьбой, выполненное в теле вертикально расположенной пластины 124 а
второго 40 индукционных датчиков. При 45 пружина обеспечивает постоянное
выравнивании положений сердечников разностная электродвижущая сила, приложенная к входам дополнительного блока обработки, становится равной нулю и двигатель 65 останавливается. При этом выходной вал 78 второй ступени 77 редуктора 69 следящей системы поворачивается на угол, являющийся функцией высоты полета. При движении ролика 84 блока коррекции конструктивных ошибок устройства 81 вдоль ленты 89 происходит дополнительный поворот вала 82, а вместе с ним и поводка 93, передающего дви52749610
женив с помощью втс рого погюдка 94 на вал 95, на котором жестко сидит кулачок 105 цепи обратной связи следящей системы. Таким образом происхо- 5
дит внесение поправок на конструктивные погрешности системы с помощЪю блока коррекции конструктивных ошибок устройства. На валу 95 жестко наса- 10 жены роторные узлы 112 и 118 первого 114 и второго 115 выходных элементов датчика, например потенциометров, сельсинов и т,,г,, вырабатывающих электричрские сигналы, являющиеся 15 функцией высоты полета,
Особенностями блока 81 коррекции конструктивных ошибок устройства является размещение этого блока в цепи на границе прямой и обратных связей 20 следящей системы, что позволяет корректировать конструктивные погрешности не только в информации выходных элементов, но и в информации самой следяшеГ- системы как таковой; введе- 25 ние второго канала измерения в одном блоке коррекции, осуществленного введением второго поводка 116, один конец которого жестко закреплен на другой стороне вала 82, сиг-метрично 30 расположенном продольной оси прибора и разметен1-по первого поводка 93 кор- рекционного устройства 81, соприкасаясь боковой поверхностью с поводком 117, другой конец которого жестко закреплен в теле вала 118с помощью втулки 119 и винта 120, на котором с помощью втулки 121 жестко закреплен к валу 118 один конец четвертой маломоментной спиральной пружи- 40 ны 122, другой конец которой жестко защемлен в продольной прорези винта 123, ввинченного в отверстие с резьбой, выполненное в теле вертикально расположенной пластины 124 а
силовое замыкание поводков 116 и 117 и передачу движения от двигателя 65 на вал 118, свободно вращающийся в опорах 125 и втулки 26, имеющей
50 сквозное центральное цилиндрическое отверстие и ввизпенной по резьбе, выполненной на ее боковой пилиндри- ческой поверхностя и боковой поверхности внутреннего центрального ци55 линдрического отверстия вала 70 вблизи его лицевого торца. Поводок 116 является вторым выходом блока коррекции конструктивных устройства, а поводок 117 - вторым входом
II15
блока индикации, поскольку на боковой поверхности вблизи лицевого торца вала 118 насажен второй узел футер 127 - стрелка 128, указывающая относительно неподвижной шкалы 76, проградуи- рованной в единицах высоты, высоту в тысячах метров.
Барометрический датчик высоты вы
полнен двухдиапазонным с большой чув- ю водом второго резистора 151 и положиствительностью в первом диапазоне (малые высоты) и меньшей чувствительностью во втором диапазоне (большие высоты). Это достигнуто благодаря тому, что на гайках 129, жестко соединенных с гайками 6 задатчика высоты вертикальными стрйками и друг с дру- ггм с помощью цилиндрического пояса 1 Ю, и на этом поясе жестко по внешнему контуру присоединена мембрана 131, расположенная выше верхней мембраны блока анероидных коробок 3 и имеющая центральное сквозное отверстие, пропускающее выступающие элементы верхней части анероидного блока коробок, а на кулачке 105 при переходе с диапазона малых высот на диапазон больших высот и наоборот осуществлено изменение закона изменения , радуиса кулачка в функции его угла поворота.
Второй штепсельный разъем 42 своими контактами соединен соответственно с первым индикатором 132 (другой конец вывода которого заземлен), индицирующим ситуацию Работа датчика в первом диапазоне, с первым 133 и вторым 134 нормально разомкнутыми вьшодами первого переключателя 135, выводы 136 и 137 подвижных контактов которого соединены через предохранители (плавкие вставки) 138 и 139 с соответствующими нормально разомкнутыми выводами 140 и 141 второго переключателя 142, первый подвижный контакт которого своим выводом 143 соединен с обмоткой реле 144 и его нормально разомкнутым контактом 145, подвижный контакт 146 которого соединен с соответствующим контактом вто- оого штепсельного разъема. 42 и положительным полюсом второго индикатора 147, индицирующего ситуацию Рательным полюсом второго стабилитрона 152, вторые выводы которых заземлены, а положительный полюс стабилитрона 152 соединен также с соответ15 ствующим выводом второго штепсельного разъема 42 как и положительный полюс первого стабилитрона 150, Вывод второго подвижного контакта 153 второго переключателя 142 соединен с
20 первым выводом пятого резистора 154, второй вывод которого соединен с первым выводом первого подстроечного резистора 155, второй вывод которого и подвижный контакт заземлены, и пер25 вым выводом второго подстроечного резистора 156, второй вывод которого заземлен, а средняя точка и подвижный контакт выведены на соответствующие клеммы второго штепсельного разъ30 ема 42. Первый переключатель 135
блока 157 управления и индикации включается при необходимости включения датчика в рабочий режим измерения высоты. При зтом через соответствующие
J5 контакты второго штепсельного разъема 42 осуществляется подвод переменного напряжения 36 В частоты 400 Гц и стабилизированных постоянных напряжений к цепям питания всех блоков дат40 чика, включая и выходные элементы, - обеспечивающие выдачу сигналов, являющихся функцией высоты полета, а второй выключатель 142 включается только при необходимости реализации
45 режима Введение поправки на изменение давления у Земли и выключается при окончании этого режима
Первый вход блока вькодных элементов 103 и блока 45 преобраэова50 ния является также и первым входом (вал 95 с кулачком 105) блока 158 переключения диапазонов, включающего закон изменения статической характеристики датчика, реализованный добота датчика в режиме Введение поп- gg полнительной мембраной 131, размещен- равки на изменение давления у Земли, ной в первичном преобразователе, и отрицательный полюс которого зазем- изменением закона изменения радиуса лен. Первый нормально разомкнутый кулачка 105 при переходе с первого контакт 140 второго переключателя 142 диапазона измерения на второй диапа12
соединен с первым выводом третьего резистора 148, первым полюсом третьего индикатора 149, индицирующего ситуацию Питание подано, и положительным полюсом первого стабилитрона 150, отрицательные полюсы которых зазечпены, а второй вывод третьего резистора 148 соединен с первым вытельным полюсом второго стабилитрона 152, вторые выводы которых заземлены, а положительный полюс стабилитрона 152 соединен также с соответствующим выводом второго штепсельного разъема 42 как и положительный полюс первого стабилитрона 150, Вывод второго подвижного контакта 153 второго переключателя 142 соединен с
первым выводом пятого резистора 154, второй вывод которого соединен с первым выводом первого подстроечного резистора 155, второй вывод которого и подвижный контакт заземлены, и первым выводом второго подстроечного резистора 156, второй вывод которого заземлен, а средняя точка и подвижный контакт выведены на соответствующие клеммы второго штепсельного разъема 42. Первый переключатель 135
блока 157 управления и индикации включается при необходимости включения датчика в рабочий режим измерения высоты. При зтом через соответствующие
контакты второго штепсельного разъема 42 осуществляется подвод переменного напряжения 36 В частоты 400 Гц и стабилизированных постоянных напряжений к цепям питания всех блоков датчика, включая и выходные элементы, - обеспечивающие выдачу сигналов, являющихся функцией высоты полета, а второй выключатель 142 включается только при необходимости реализации
режима Введение поправки на изменение давления у Земли и выключается при окончании этого режима
Первый вход блока вькодных элементов 103 и блока 45 преобраэования является также и первым входом (вал 95 с кулачком 105) блока 158 переключения диапазонов, включающего закон изменения статической характеристики датчика, реализованный до176, являющимся входом узла переключения механических элементов 171, дополнительной витой цилиндрической пружиной 177, упирающейся одним торцом в плоский диск 178, жестко посаженный на вал 179, свободно вращающийся в опорах 180, а другой конец упирается в плоскую торцевую поверхность цилиндрической втулки 181, имеющей сквозное центральное цилиндрическое отверстие и продольный паз, сопряженный с боковыми поверхностями шпонки 182, запрессованной в соответ- ствукяций паз вала 179, по посадке движения, вокруг наружной боковой поверхности которой, выполненной в виде двух цилиндров разного диаметра, размещен электромагнит 170; на боковой поверхности которой вблизи торца, сопряженного с пружиной 177, выполнен узкий радиальный выпет, переходящий в горизонтальный переход, окаймляющий снаружи конструктивные элементы опоры 180 вала 179, заканчивающийся с наружного торца узким переходом, параллельным первому переходу, заканчивающимся плоским диском 183, соосно расположенным с осью тела втулки 182, на наружной торцр.- вой поверхности которого жестко закреплен плоский цилиндрический первый диск 18А трения, другой плоский цилиндрический диск 185 трения, аналогичный первому,расположенный параллельно ему на близком расстоянии, жестко закреплен на плоской торцевой поверхности цилиндрического диска 186, запрессованного поверхностью центрального цилиндрического отверстия на торец вала 17, свободно вращающегося в опорах 187, вблизи второго свободного торца которого жестко насажено коническое зубчатое колесо 16, сопряженное боковой поверхностью зубьев с зубьями конического зубчатого колеса 15 первичного преобразователя (вал 17 с коническим зубчатым колесом 16 является первым выходом узла переключения механических элементов 171 и всего блока коррекции изменения давления у Земли), на вау 17 жестко насажено ведущее цилиндрическое зубчатое колесо 188 второго ополнительного редуктора 189, на выходном валу 190 которого, свободно вращающемся в опорах 191, жестко насажено выходное эубчатое колесо 192 (второй выход блока коррекции изменения давления у Земли), сцепленное : зубчатой нарезкой 193, выполненной в пределах некоторого угла на сопри- касаемых боковых поверхностях корпусов первого 114 и второго 115 выходных элементов второй вход выходных элементов) , другая торцевая поверхность цитиндричсской втулки 18
снабжена узким радиальным вылетом, параллвльн1-1м пер; ONfy вьшету, переходящим в горизонтальный переход, окпа- тывающий ,жи вторило опору вапа 79, пер1:ходящий в вертикальный переход, зака)чивающийгя диском 194, гоос - но расположенным с осью вала 179, на внутренней плоской цилиндрической стороне которого жестко закреплен тонкий цили щричсский третий диск 195
трения, а другая сторона диска 194
снабжена полой цгшицдрической втулкой, Быполнен1гой зацело с зубчатым колесом 17Р|, имеющей продольный паз, сопрягае мый по посадке движения со шпонкой
196, запрессованной в тело вала J97, па свободном конце которого, располо- женом вблизи третьего диска 195 трения, жестко насажен плоский цилиндрический диск 198, на плоской торцевой
поверхности которого жестко закреплен плоский цилиндрический четвертьш диск 199 трения так, что расстояния между первым и вторым, третьим и четвертым дисками трения одинаковы, вал 197 является входным валом третьего дополнительного редуктора 200 блока коррекции изменения давления у Земли, ведомое зубчатое колесо 201 которого сопряжено зубьями с зубьями
цилиндрической нарезки на боковой
поверхности втулки 202 (колесо 201 - третий выход блока коррекции изменения давления у Земли, а колесо втулки 202 - третий вход блока индикации)
блока 73 индикации.
Втулка 202 блока 73 индикации (фиг, 2) имеет центральное цилиндрическое отверстие, боковая поверхност которого запрессована на наружную
боковую поверхность ларикоподргипни- ка 203, боко1зая лог.ерхность знутр ;н него отверстия которого по посадке дп tжeния соединена с боковой поверхностью вала 70, а на лицевой цилишг
ричоской плоской торцевой иоверхнос- ти втупки 202 жестко прикреплена шкала, проградуированная в единицах давления, просматриваемая с лицевой стороны датчика в окно, выполненное
в шксше высот, причем давление отсчитывается относительно неподвижного индекса, выполненного на шкале высот, на валу 70 вблизи втулки 202 жестко насажена втулка 20Д, в которой жестко закреплен один конец пятой мапомо- ментной спиральной пружины ,05, второй конец которой жестко защемлен в продольном пазу винта, ввинченного в тело вертикально расположенной платины 206.
Блок коррекции нуля выполнен в В1оде кремальеры 207, жестко насаженной на вал 208, свободно вращающийся в опорах 209, на котором жестко поса-г ж-ны плоский цилиндрический дигк 210, т Фцевая поверхность которого сопря- жгла с торцом витой цилиндрическгй пружины 211, другой конец которой упирается в плоский торец зубчатого колеса 212 дополнительного редуктора 213 блока коррекции нуля, выходное ведомое зу.бчатсе колесо 21А которого, являющееся выходом блока коррекции нуля, сопряжено боковой поверхностью зубьев с боковой поверхностью зубьев нарезки 215, выполненной в пределах некоторого угла ла боковых поверхностях первого П4 и второго 115 выходных элементов (третий вход блока выходных элементов) так, что в нормальном положении кремальеры зубчатое колесо 214 сопряжено с зубчатой нарезкой, выполненной на корпусе наиболее удаленного от лицевой стороны прибора выходного элемента, а при вытягивании кремальеры на себя зубчатое колесо 214 сопряжено с боковой нарезкой на корпусе выходного элемента, ближе расположенного к лицевой стороне прибора. Последнее обеспечивает раздельное подкручивание корпусов выходных элементов относительно неподвижных их роторов при настройке механического и электрических нулей выходных элементов прибора.
Вращение двигателя 65 в режиме Введение поправки на изменение давления у Земли продолжается до подхода .необходимой отметки на шкале давлений блока 73 индикации к индексу отсчета давления на неподвижной шкале 76 высот. При этом выключают второй переключатель 142, вызывающий отпускание электромагнитов 168 и 170 соответственно блока 156 переключения диапазонов и узла переключения
механических элементов 171 блока 172 коррекции изменения давления у Земли, следствием чего является разрыв передачи вращения вала 95 на связанные через дополнительные редукторы блока коррекции изменения давления у Земли устройства датчика. Заканчивается режим Введение поправки на давление
У Земли установкой кремальеры 173, связанной со щеткой (подвижным контактом) второго подстроечного резистора 156 блока 157 управления и индикации в нейтральное нулевое положение.
В режиме Введение поправки на изменение давления у Земли при срабатывании электромагнита 170 соответ- (jTBeHHo первый и второй (184 и 185),
а также третий и четвертый (195 и 199) диски трения сцепляются друг с другом и вращение вала 95 передается через первый дополнительный редуктор 173 на зубчатое колесо 176, вошедшее
в этом режиме в зацепление с ведомым зубчатым колесом редуктора 173, жестко связанное со всеми дисками трения Через первую пару дисков трения вра- цение вала 95 передается на вал 17 и
жестко закрепленную на нем коническую шестерню 16 (первый выход блока коррекции изменения давления у Земли) на сцепленное с ним коническое зубчатое колесо 15, жестко сидящее на валу 12,
который через жестко сидящее на этом валу цилиндрическое колесо 11, являющееся ведущим зубчатым колесом редукторов первичного преобразователя, передает вращение на винтовые пары
гайка 6 - винт 7, благодаря чему основание 5 вместе с блоком анероидных коробок 3, а также первый сердечник 37 первого индукционного датчика занимает положение в магнитопроводе иидукционного датчика, соответствующее давлению у Земли, на изменение которого и вводится поправка, при этом вал 95, отрабатывая это положение, все более соответствует положению, соответствующему высоте, соответствующей давлению у Земли. Одновременно через вал 17, редуктор 189, зубчатое колесо 192 осуществляется подкрутка корпубов, выходных элементов к положению, соответствующему выбору изменения высоты в показаниях выходных элементов, соответствующему изменению давления у Земли. Одновременно вторая пара дисков 195-199 трения через вал 197, редук131
зон и наоборот, и узел индикации диапазонов 158, содержащий щеточный узел, имеющий щетку 159, снабженную лепестком для припайки соединительного провода, жестко закрепленную в цилиндрическом В1еткодержателе 160, выполненном из изоляционного материала и жестко, но с регулировкой по углу положения щетки относительно начального радиуса кулачка 103, закрепленном на валу 95 кулачка 105. Щетка опирается на плоскую торцевую поверхность цилиндрического буртика цилиндрического токопроводящего элемента 161, выполненного в виде тонкого цилиндра, соосно расположенного относительно оси вала 95 кулачка 105 и имеющего три цилиндрические поверхности последовательно увеличивающихся радиусов, соединенных двумя плоскими цилиндрическими переходами, и внешний торцевой цилиндрический плоский буртик в пределах угла, соответствующего диапазону малых высот, наружная поверхность которого сопряжена со щеткой 160 под некоторым контактным давлением, а другая торцевая поверхность опирается иа плоскую торцевую поверхность цили}Щрического статора 162, выполненного из изоляционного материала и жестко закрепленного к корпусу прибора 102 так, что его внутреннее несквозное цилиндрическое отверстие симметрично расположено относительно оси вапа 95, в щеткодержателе 160 жестко закреплена тарельчатая пружина 163, опирающаяся торцевым выступом на плоскую торцевую поверхность второго перехода между цилиндрическими поверхностями цилиндрического токопроводящего элемента 161, на плоскую торцевую поверхность первого плоского цилиндрического перехода которого опирается один конец витой цилиндрической пружины 164, двугая торцевая поверхность которой опирается на торцевую поверхность щеткодержателя 160, а первый цилиндр элемента 161, выполненного из пружинящего материала и имеющего продольные узкие разрезы, симметрично расположенные друг относительно друга по окружности этого цилиндра, с зазором расположен вокруг втулки 165, жестко закрепленной на боковой поверхности вала 95 и вьтолнвнной из изоляционного материала, имеющего большой коэффициент тре2749614
ния с материалом токопроводящего элемента 161, размещенной по всей длине первого цилиндра элемента 161, имеющего на внешней боковой цилиндрической поверхности симметрично расположенные друг относительно друга вдоль окружности среднего поперечного сечения тонкие вьтеты, заканчивающиеся
то более толстыми цилиндрами, вокруг
которых размещень катурши 166, имеющие форму полого тонкостенного цилиндра с тонкими г:. 1оскими щечквмг, жестко прикрепленными одной стороной к наруж- 15 ной боковой поверхности первого цилиндра элемента 161, заполненного обмотками 167 электромагнитов 168, концы которых соединены друг с другом, причем один конец заземлен, а другой, 20 предетавляюш ш второй вход блока 158 переключения диапазонов, соединен через соответствующие контакты первого и второго штепсельных разъемов 35 и 42 с первым выходом блока 157 управ- 25 ления и индикации, совпадающим с выводом подвижного контакта 146 реле 144, и с вторым входом блока коррекции изменения давления у Земли, совпадающим с положительным выводом обмот- 30 ки 169 электромагнита 170 узла переключения механических элементов 171 блока 72 коррекции изменения давления у Земли, второй вывод которой заземлено
35 При работе датчика в режиме Работа датчика в первом диапазоне (малых высот) щетка 159 находится на токо- проводящем участке цилиндрического токопроводящего кольца 161 блока 158 40 переключения диапазонов, поскольку к лепестку этого кольца, являющегося третьим входом этого блока, с помощью провода, соединенного с вторым выходом блока 157 управления и инди- 45 кации, реализующим соединение свободного конца этого провода через контакты второго штепсельного разъема с положительным полюсом первого стабилитрона 150, и с лепестка щетки 159 50 сиимаетс.я высокий уровень напряжения,, передающийся через первь Л выход блок переключения диапазонов, реализованный соединением щетки 159 через соответствующий контакт второго штеп- 55 сельного разъема, являющийся первым входом блока управления и индикации, с положительным полюсом первого индикатора 132, индицирующим ситуацию Работа датчика в первом диапазоне.
При переходе с первого диапазона на второй (большие высоты) щетка 159 соскальзывает с токопроводящего участка токопроводящего кольца 161, разрывая цепь питания первого индикатора 13., что и сигнализирует о работе прибора во втором диапазоне измерения. При обратном переходе на диапазон малых высот при снижении летательного аппарата щетка 159 вновь заходит на токопроводящий участок токопроводящего кольца 161, восстанавливая цепь питания первого индикатора 132, который вновь сигнализирует о работе прибора в первом диапазоне и мерения вплоть, до посадки легатель иого аппарата.
Режим Ваедение поправки на изменение давления у Земли осуществляется следующим образом. Кремальерой 173, являющейся органом управления второго подстроечного резистора 156, поворотом относительно шкалы 174, проградуированной в единицах высоты и знака отклонения давления у Земли относительно стандартного давления, устанавливают режим работы устройства при вводе поправки (не показаны). При этом средняя точка и движок второго подстроечного резистора являются третьим и четвертым выходами блока управления и индикации и они с помощью соединительных проводов, припаенных одними концами к соответствующим выводам второго 42 а другими концами - к выводам первого 35 штепсепьных разъемов, являющихся соответственно третьим и четверты входами дополнительного блока обработки, которые соединены соответственно с первым и вторым входами измерительного ключа 175, первый выход 176 которого через резистор 177
соединен с Землей блока и первым вхо- 45 ления у Земли содержит узел переклю- дом 48 сумматора 51, второй выход 178 чения механических элементов 171, через резистор 179 соединен с вторым первый дополнительный редуктор 173, входом 53 сумматора 51 о
Предварительно включают переключаведущее цилиндрическое зубчатое колесо 174 которого жестко насажено
тель 142 блока 157 управления и инди- 50 п 5 с кулачком 105, являющийся
кации, устанавливающий режим работы Введение поправки на изменение давления у Земли путем срабатывания реле I44 и передачи положительного полюса напряжения через нормально разомкнутый контакт этого реле на подвижной контакт и далее с помощью соединительных проводов через соответствующие контакты второго 42 и
первого 35 разъемов на положительные выводы обмоток 167 и 169 электромагнитов 168 и 170 соответственно блока 156 переключения диапазонов и узла переключения механических элементов 171 блока 172 коррекции изменения давления у Земли. Установленный режим индицируется индикатором 147.
При срабатывании электромагнита 168 блока 158 переключения диапазонов токопроводящий цилиндр 161 плотно охватывает втулку 165, жестко связанную
с валом 95, благодаря чему токопрово- д ящий участок цилиндрического токопроводящего кольца 161, преодолевая трение щетки 159 и пружин 163 и 164, подворачивается вместе с валом 95 на
величину изменения высоты, соответствующей изменению давления у Земли относительно ст андартного уровня давления.
Это вращение вала осуществляется
следующим образом. Поправка на изменение давления у Земли производится в режиме горизонтального полета. Напряжение, снимаемое с соответствующих выводов второго подстроечного резистора 156, поступает на вход измерительного ключа 175, открывает его и поступает на вход сумматора 51, вызывая на выходе усилителя 59 следящей системы такое напряжение, что будучи приложенным к соответственно первой и второй полуобмоткам управления двигателем 65 следящей системы, вызывает его вращение в ту сторону, которая соответствует направлению
изменения высоты, соответствующей
направлению изменения давления у Земли относительно нормального давления.
Блок 172 коррекции изменения давления у Земли содержит узел переклю- чения механических элементов 171, первый дополнительный редуктор 173,
ведущее цилиндрическое зубчатое колесо 174 которого жестко насажено
первым входом блока коррекции изменения давления у Земли, второй вход которого совпадает с цепью передачи высокого уровня напряжения на обмот- 55 ку электромагнита 170, рассмотренной ранее, а ведомое зубчатое колесо 175 при нормальной работе в режиме Измерение высоты выведено из зацепления с сопрягаемым с ним зубчатым колесом
тор 200, зубчатое колесо 201 передает вращение двигателя с вала 95 на диск 202, несущий на себе шкалу давлений.
Эта передача вращения с вала 95 на другие устройства датчика прекращается при достижении нужной отметкой щка- лы давлений индекса на шкале высот вы15
20
25
30
ключением второго переключателя 142 с ю элементов имеется шины питания, последующим выводом кремальеры 173 относительно щкалы на блоке 157 управления и индикации 157 в нейтральное (нулевое) положение. При этом магниты 168 и 170 отпускают а Отпускание первого электромагнита приводит к отрыву токопроводящей втулки 161 от вала 95 за счет собственных пружинящих свойств и прекращение вращения токо- проводящего участка элемента 161 относительно щетки 159 этого узла. Отпускание электромагнита 170 приводит к разрыву контакта между парами дисков трения узла переключения механических элементов и выходу из зацепления зубчатого колеса 176 с ведомым зубчатым колесом редуктора 173, т.е. к прекращению связи вала 95 с блоком 172 коррекции изменения давления у Земли и связанными с ним устройствами датчика.
Барометрический датчик высоты может быть установлен непосредственно на приборной доске о Он может быть установлен также в непосредственной близости к приемнику воздугшого давления. В этом случае один из выходных элементов барометрического датчика высоты может быть использован как задатчик высоты для указателя высоты, установленного на приборной доске и работающего по принципу следящей системы, а также имеющего дву}сстре- лочную систему отсчета показаний высоты относительно неподвижно закрепленной к корпусу указателя шкалы, проградуированной в единицах высоты.
Формула изобретения
1« Барометрический датчик высоты для летательного аппарата, содержащий последовательно соединенные приемник воздушного давления и первичный преобразователь, блок коррекции конструктивных ошибок устройства и блок выходных элементов, а также блок обработки, блок преобразования, первый выход которого соединен с первым
л и чающийся тем, что, с лью упрощения конструкции и умен ния уровня поггзшностей, датчик полнен днухдиапазонным, первичны преобразователь снабжен узлом те ратурной компенсации, в него доп нительно введены дополнительный обработки, блок переключения диа нов измерения, блок управления и дикации, статическая характерист первичного преобразователя выпол функционально зависимой от высот причем первый выход блока коррек изменения давления у Земли соеди с вторым входом первичного преоб вателя, второй выход которого со нен с первым входом дополнительн блока обработки, второй вход кот соединен с вторым выходом блока образования, первый и второй вых которого соединены с соответству входами блока обработки, первый которого соединен с первым входо блока индикации, второй выход ко го соединен с входом блока корре конструктивных ошибок устройства первый выход которого соединен с выми входами блоков преобразован коррекции изменения давления у З 40 переключения диапазонов, выход к торого соединен с первым входом управления и индикации, первый вы которого соединен с вторыми вход блока коррекции изменения давлени 45 У Земли и блока переключения диап нов, третий вход которого соедине вторым выходом блока управления и дикации, а его третий и четвертый выходы соединены с соотретствующи 50 входами дополнительного блока обр ки, вторые и третьи выходы блока рекции изменения давления у Земли соединены с соответствующими вход блока выходных элементов и блока 55 дикации, второй вход которого сое нен с вторым выходом блока коррек конструктивных ошибок устройства, ход блока коррекции нуля соединен третьим входом блока выходных эле
35
выходом первичного преобразопателя, блок индикации, блок коррекции изменения давления у Земли, блок коррекции нуля, причем к первичному преобразователю, блоку обработки и блоку преобразования подведены шины питания внешним переменным напряжением, а у блока обработки и блоков выходных
5
0
5
0
элементов имеется шины питания,
о тл и чающийся тем, что, с целью упрощения конструкции и уменьшения уровня поггзшностей, датчик выполнен днухдиапазонным, первичный преобразователь снабжен узлом температурной компенсации, в него дополнительно введены дополнительный блок обработки, блок переключения диапазонов измерения, блок управления и индикации, статическая характеристика первичного преобразователя выполнена функционально зависимой от высоты, причем первый выход блока коррекции изменения давления у Земли соединен с вторым входом первичного преобразователя, второй выход которого соединен с первым входом дополнительнотю блока обработки, второй вход которого соединен с вторым выходом блока преобразования, первый и второй выходы которого соединены с соответствующими входами блока обработки, первый выход которого соединен с первым входом блока индикации, второй выход которого соединен с входом блока коррекции конструктивных ошибок устройства, первый выход которого соединен с первыми входами блоков преобразования, коррекции изменения давления у Земли, 0 переключения диапазонов, выход которого соединен с первым входом блока управления и индикации, первый выход которого соединен с вторыми входами блока коррекции изменения давления 5 У Земли и блока переключения диапазонов, третий вход которого соединен с вторым выходом блока управления и индикации, а его третий и четвертый выходы соединены с соотретствующими 0 входами дополнительного блока обработки, вторые и третьи выходы блока коррекции изменения давления у Земли соединены с соответствующими входами блока выходных элементов и блока ин- 5 дикации, второй вход которого соединен с вторым выходом блока коррекции конструктивных ошибок устройства, выход блока коррекции нуля соединен с третьим входом блока выходных элемен5
10
тон соответствующие входы блока управления и индикации соединены с соответствующими пгинами внешних источников переменного и постоянного напряжений, выходи, соответствующие шинам переменного и стабилизированного постоянного напряжений которого соединены с соответствующими шинами питания блоков датчика, причем в этом блоке предусмотрена индикация ситуаций Питание подано, Работа датчика в режиме измерения в первом диапазон- (малые высоты), Работа датчика в режиме иэмарения во втором диапазо- 15 не (большие высоты), Режим Введе- t не поправки на изменение давпвтгия V Земли ,
3, Датчик поп. l,oтличaю- щ и и с я тем, что дополнительный лок обработки содержит первый каскад 20 усиления по напряжению, собранньй на интегральной схеме операционного усилителя, работающе го в режиме сумматора, первый вход которого является первым входом устройства и через третий резистор соединен с земляной шиной, второй вход которого через четвертый резистор, соединен с вторым входом сумматора, первым выводом пятого резистора, второй вывод которого соединен с первым выходом сумматора, второй выход которого заземлен, а через шестой резистор - с первым выходом блока измерительных ключей, второй
25
30
рованные напряжения, а входы блока измерительных ключей совпадают с треа ющ и и с я тем, что блок переключения поддиапазонов снабжен роторным узлом.
выход которого соединен с первым входы первого и второго подвижных контак-з5 дом сумматора, причем к цепям питания тов первого переключателя соединены с сумматора и блока измерительных ключей соответствующими нормально разомкнуты- подведены соответствующие стабилизи- ми выводами второго переключателя, первый вывод первого подвижного контакта второго переключателя соединен 40 тьим и четвертым входами дополнитвль- с положительным полюсом обмотки реле, ного блока обработки, другой полюс обмотки которого зазем- 4, Датчик по п. 1, о т л и ч лен, и с его нормально разомкнутым контактом, подвижны контакт которого соединен с положительным полюсом вто- 45 жестко закрепленным на оси, поворачи- рого индикатора, второй полюс которо- вающейся на угол, функционально зави- го заземлен, вывод второго подвижного контакта второго переключателя через первый допвлнительный резистор соединен с первыми выводами первого и второго подстроечных резисторов, вторые выводы которых и подвижной контакт первого из них заземлены, первый нормально разомкнутый вывод второго переключателя соединен с положительными полюсами третьего индикатора и первого стабилитрона, вторые выводы которых заземлены, а также с
50
сящий от высоты, выполнен Го1М из изоляционного материала и крепящим жестко и изолировано одна от другой щетку (подвижной контакт), снабженнутб лепестком с припаенным к нему проводом, и тарельчатую пружину, опирающиеся на соответствующие смежные плоские цилиндрические переходы меж- 55 ДУ цилиндрами увеличивакйцихся диаметров токопроводящего цилиндрического элемента, выполненного из пружинящего материала, цилиндр меньшего радиупервым выводом второго резистора.
5
второй вывод которого соединен с первым выводом третьего резистора и положительным полюсом второго стабилитрона, другие выводы которых заземлены, причем второй подвижной контакт второго переключателя, средняя точка и подвижный контакт второго подстроечного резистора, подвижный контакт реле, положительные полюсы первого и второго стабилитронов, а также земляная шина блока соединены с соответствующими контактами штепсельного разъема блока, соединенного с помощью жгута со штепсельным разъемом датчика.
3, Датчик поп. l,oтличaю- щ и и с я тем, что дополнительный лок обработки содержит первый каскад 0 усиления по напряжению, собранньй на интегральной схеме операционного усилителя, работающе го в режиме сумматора, первый вход которого является первым входом устройства и через третий резистор соединен с земляной шиной, второй вход которого через четвертый резистор, соединен с вторым входом сумматора, первым выводом пятого резистора, второй вывод которого соединен с первым выходом сумматора, второй выход которого заземлен, а через шестой резистор - с первым выходом блока измерительных ключей, второй
5
0
рованные напряжения, а входы блока измерительных ключей совпадают с тревыход которого соединен с первым входом сумматора, причем к цепям питания сумматора и блока измерительных ключей подведены соответствующие стабилизи- тьим и четвертым входами дополнитвль- ного блока обработки, 4, Датчик по п. 1, о т л и ч жестко закрепленным на оси, поворачи- вающейся на угол, функционально зави-
а ющ и и с я тем, что блок переключения поддиапазонов снабжен роторным узлом.
выход которого соединен с первым входом сумматора, причем к цепям питания сумматора и блока измерительных ключей подведены соответствующие стабилизи- тьим и четвертым входами дополнитвль- ного блока обработки, 4, Датчик по п. 1, о т л и ч жестко закрепленным на оси, поворачи- вающейся на угол, функционально зави-
выход которого соединен с первым входом сумматора, причем к цепям питания сумматора и блока измерительных ключей подведены соответствующие стабилизи- тьим и четвертым входами дополнитвль- ного блока обработки, 4, Датчик по п. 1, о т л и ч жестко закрепленным на оси, поворачи- вающейся на угол, функционально зави-
сящий от высоты, выполнен Го1М из изоляционного материала и крепящим жестко и изолировано одна от другой щетку (подвижной контакт), снабженнутб лепестком с припаенным к нему проводом, и тарельчатую пружину, опирающиеся на соответствующие смежные плоские цилиндрические переходы меж- ДУ цилиндрами увеличивакйцихся диаметров токопроводящего цилиндрического элемента, выполненного из пружинящего материала, цилиндр меньшего радиуса которого выполнен в виде пружины.
имеющей продольные прорези, симметрично размещенные друг относительно друга, внутреннее CKBOSfioe цилиндрическое отверстие которого охватывает с зазором цилиндрическую втулку, выполненную из изоляционного материала и жестко закрепленную на наружной поверхности основного вала, между первым плоским цилиндрическим переходом между двумя смежными цилиндрами и торцовой внутренней поверхностью ротора размещена витая цилиндрическая пружина, два наружных плоских цилиндрических перехода токопроводящей цилиндри- ческой втулки опираются на соответствующие торцовые поверхности цилиндрического статора, выполненного из изоляционного материала и жестко закрепленного к корпусным элементам датчика так, что его ось симметрии совпадает с продольной осью основного вала, а на внешней боковой поверхности внутреннего цилиндра токопрово- дящего цилиндрического элемента в его срединной плоскости поперечного сечения симметрично расположены друг относительно друга тонкие радиальные вылеты, заканчивающиеся цилиндрами большего радиуса, вокруг которых надеты цилиндрические катушки с горизонтальными щечками, между которыми размещены обмотки электромагнитов, жестко присоединенных к соответствующим поверхностям токопроводящсго цилиндрического элемента, причем соответствующие выводы электромагнитов соединены между собой, один из таких узлов заземлен, а другой, как и токо- проводящий цилиндрический элемент, присоединен через контакты соответствующих разъемов к положительному полюсу внешнего источника постоянного напряжения, а щетка ротора через контакты тех же разъемов соединена с положительным полюсом первого индикатора блока управления и индикации, другой полюс которого заземлен, причем поверхность соприкосновения токопро- водящего цилиндрического элемента со щеткой ротора по длине совпадает с углом поворота, соответствующим работе устройства в первом диапазоне измерения высоты.
5, Датчик поп, 1,отличаю- щ и и с я тем, что блок коррекции изменения давления у Земли содержит узел переключения механических элементов, первый, второй и третий до
0
5
5
полнительные редукторы, промежуточные валы, коническое зубчатое колесо, прррым входом блока является вал с кулачком, угол поворота которого функционально зависит от высоты, на котором жестко закреплено ведущее цилиндрическое зубчатое колесо первого дополнительного редуктора, ведомое зубчатое колесо которого нормально разомкнуто дополнительной витой цилиндрической пружиной от предшествующего зуб гтого колеса этого редуктора и может по посадке движения пе- ремеща1ься вдоль шпонки, запрессованной в соответствующую прорезь в первом дополнительном валу, свободно вращающемся в соотяетствуюишх опорах, узел переключения механических элементов содер,-хит основание с двумя вертикальными стойками, в которых размещены опорные втулки, соосно рас-- положенные с осью первого вала, лежащей в плоскости вертикального разреза датчика горизонтально, в центральных отверстиях которых свободно вращается и может линейно перемещаться в небольших пределах второй дополнительный вал устройства, имеющее продольный паз с запрессованной в него шпонкой, по которой по посадке движения может перемещаться цилиндрический ротор, наружная поверхность которого выполнена в виде двух смеж- g ных цилиндров разного диаметра, вокруг которого размещена катуа1ка электромагнита, один конец обмотки которого заземлен, а другой соединен с вторым входом блока, пружина размещена между правой вертикальной опорной стойкой, жестко вместе с основанием присоединенной к корпусу прибора, и торцом цилиндрического ротора, имеющего вблизи торцовой поверхности ра- 5 диальный достаточно тонкий выпет, переходящий в горизонтальную планку, огибающую опору, заканчивающуюся вертикальным вьшетом вниз, жестко сое- динeины с плоским циллк.тром, соосно расположенным с осью ротора, на внешней стороне которого жестко закреплен первый тонкий цилиндрический диск тре1тя, вблизи которого размещен второй цилиндрический диск трения, 5 аналогичный первому, параллельно расположенный по отношению к нему и жестко закрепленный на плоском цилиндрическом диске, жестко закрепленном вблизи торца третьего дополнительного
0
0
0
вала, свободно вращаюп(егося в опорах, на боковой поверхности которого вблизи другого торца жестко насажеио коническое зубчатое колесо, являющееся первым выходом блока коррекции изменения давления у Земли, а между опорами третьего дополнительного вала жестко насажено ведущее зубчатое колесо второго дополнительного редуктора, ведомое зубчатое колесо которого является вторым выходом блока коррекции изменения давления у Земли и сопряжено зубьями с зубьями зубчатой нарезки, выполненной на боковых поверхностях сопрягаемых торцами кор- г усов первого и второго выходных элементов датчика, вблизи второго торца ; отора выполнен радиальньпЧ вылет„ аналогичный и параллельный первому, переходящий в горизонтальный переход, огибающий снаружи вторую опорную стойку узла переключения механических элементов, переходящую в вертикальный переход, заканчивающийся плоским цилиндрическим диском, соосно расположенным первому, второму и третьему дополнителЕ«ным валам, на внутренней поверхности которого жестко закреплен третий плоский цилиндрический диск треаип, другая торцовая поверхность которого с помощью полой цилиндрической втулки, свободно перемещающейся вдоль первой шпонки, жестко соединена по торцовой поверхности г ведомым зубчатым колесом первого дополнительного редуктора, на свободном конце первого дополнительного вала жестко насажен второй плоский цилиндрический диск, на котором жестко закреплен . четвертый цилиндрический диск трения, расположенный от третьего диска трения на таком же расстоянии, на котором разнесены друг от друга первый
сквозным цилиндрическим отверстием, в котором жестко закреплен нижний жесткий центр энероидного блока коробок, а концы крестовины жестко соединены с гайками, симметрично расположенными между собой, сопряженными с соответствующими винтами, расположенными вертикально-параллельно оси
10 чувствительности анероидного блока коробок, свободно вращающимися в опорах, размещенных в горизонтальных полках вертикальных стоек и в основании, выполненном в виде плоской плас15 тины, причем цапфы винтов выходят вниз за пределы основания и на них жестко насажены ведомые зубчатые колеса редукторов, ведущее зубчатое колесо которыхiразмещено с размещени20 ем оси вдоль оси чувствительности
анероидного блока коробок между основанием и дном герметичного корпуса первичного преобразователя на валу, герметично с помощью сальника выве25 денного за пределы корпуса преобразователя, на который снаружи корпуса насажено коническое зубчатое колесо, на уровне выше верхней мембраны анероидного блока коробок на величину
30 его перемещения в пределах первого диапазона измерения размещена плоская гофрированная мембрана с центральным сквозным цилиндрическим отверстием, приваренная к цили1одрическому поясу,
од жестко присоединенному к торцам гаек второй группы, соединенных вертикальными стойками с гайками первой группы, причем верхний жесткий центр анероидного блока коробок имеет вблизи
40 торцовой поверхности узкий горизонтальный вылет, переходящий в вертикальную стойку, в отверстии которой жестко, но с возможной регулировкой
положения, размещен биметаллический и второй диски трения, причем на пер- 45 компенсатор, иа свободном конце ко- вой дополнительной оси жестко насаже- торого размещена на шарнире, прохо- но ведущее зубчатое колесо третьего дящем через спай биметаллов, втулка, дополнительного редуктора, ведомое имеющая сверху плоскую(Поверхность, зубчатое колесо -которого является снабженную центральной шаровой выем- третьим выходом блока коррекции изме- 50 кой, в которой размещен шарик, вер нения давления у Земли,
няя поверхность которого сопряжена с аналогичной выемкой во второй втулке, имеющей внизу плоский цилиндрический буртик, на который опирает- 55 ся торец витой цилиндрической пружины, другой конец которой опирается в плоское горизонтально расположенное основание, жестко связанное с кор пусом преобразователя, на котором засквозным цилиндрическим отверстием, в котором жестко закреплен нижний жесткий центр энероидного блока коробок, а концы крестовины жестко соединены с гайками, симметрично расположенными между собой, сопряженными с соответствующими винтами, расположенными вертикально-параллельно оси
чувствительности анероидного блока коробок, свободно вращающимися в опорах, размещенных в горизонтальных полках вертикальных стоек и в основании, выполненном в виде плоской пластины, причем цапфы винтов выходят вниз за пределы основания и на них жестко насажены ведомые зубчатые колеса редукторов, ведущее зубчатое колесо которыхiразмещено с размещением оси вдоль оси чувствительности
анероидного блока коробок между основанием и дном герметичного корпуса первичного преобразователя на валу, герметично с помощью сальника выведенного за пределы корпуса преобразователя, на который снаружи корпуса насажено коническое зубчатое колесо, на уровне выше верхней мембраны анероидного блока коробок на величину
его перемещения в пределах первого диапазона измерения размещена плоская гофрированная мембрана с центральным сквозным цилиндрическим отверстием, приваренная к цили1одрическому поясу,
жестко присоединенному к торцам гаек второй группы, соединенных вертикальными стойками с гайками первой группы, причем верхний жесткий центр анероидного блока коробок имеет вблизи
торцовой поверхности узкий горизонтальный вылет, переходящий в вертикальную стойку, в отверстии которой жестко, но с возможной регулировкой
няя поверхность которого сопряжена с аналогичной выемкой во второй втулке, имеющей внизу плоский цилиндрический буртик, на который опирает- 55 ся торец витой цилиндрической пружины, другой конец которой опирается в плоское горизонтально расположенное основание, жестко связанное с корпусом преобразователя, на котором за2915
креплен И1ЗДУКЦИОННЫЙ датчик цилиндрической формы, имеющий снизу, как и основание его крепления, цилиндрическое отверстие в теле центральной втулки с вертикальной осью симметрии и плоской нижней гречкой, на которую опирается катушка с первичной и вторичной обмотками индукционного датчика, являющимися соответствующими вхо- дами (питание первичной обмотки) и выходами первичного преобразователя, причем в центральном отверстии индукционного датчика перемещается цилиндрический сердечник, выполненный из магиитопроводящего материала, так что его верхний плоский торец имеет зазор с верхней крышкой индукционного
9630
датчика, между которыми размещена вторая витая цилиндрическая пружина, причем нижний конец сердечника выполнен меньшего радиуса и запрессован в отверстие, выполненное в теле второй втулки так, что ось перемещения сердечника совпадает с осью чувстви- Т€шьности анероидного блока коробок, причем катушка, охватывающая сердечник выполняется из материала с малым коэффициентом трения с материалом сердечника, в.1водьг обмоток индукционного датчика выведены за пределы корпуса первичного преобразователя через контакты герметично встроенног в него дополнительного штепсельного разъема.
F r d
lr.t C Cf I ГЛГ
527406
S3 g
to
ч
Pgfipg §
to -«ч f s § S § § S5 §
ПО 129 Щ
МЛ ПГ.Т j