ел
со
Изобретение относится к весоизмерительной технике и может быть исполь эовано для прецизионного взвешивания твердых предметов.
Цель изобретения - повышение надежности за счет увеличения динамической стойкости и расширение предела измерения за счет обеспечения возмож- нodти выбора нагрузочной оси.
На чертеже показана схема устройства для измерения массы.
Устройство содержит основание I, корпус 2 с экранирующими разделительными перегородками 3, образующими по- лости 4, в которых установлены сило- чувствительные кварцевые резонаторы 5, выполненные по форме в виде линз, на центральные части которых нанесены возбуждающие электроды 6, нагрузочная платформа 7.
На торцовых частях силочувствитель ных кварцевых резонаторов 5 установлены дополнительная нагрузочная платформа 8 с фиксатором 9 и указа- телем 10 положения, опорная платформа 1 1 с фиксатором 12 и указателем 13 положения. На корпусе 3 укреплена отсчетная шкала 14, с помощью которой производится установка в задан- ное положение (на заданный угол) дополнительной нагрузочной 8 и опорной 1 1 платформ посредством соответствующих указателей 10 и 13 положения.
Возбуждающие электроды 6 силочув- стБительных кварцевых резонаторов 5 подключены к входам соответствующих электронных возбудителей I 3, выходы которых соединены с входами сумматора 16, выход которого подключен к входу цифрового индикатора 17.
На чертеже приведены следующие обозначения: ОО - нагрузочная ось (продольная);NN - направление местной вертикали и QQ - нагрузочная ось (поперечная).
Работа устройства основана на прямом и обратном эффектах и силочастот ном эффекте.
Перед началом работы подают электрическое напряжение на электронные блоки - электронные возбудители 15, сумматор 16, и цифровой индикатор 17
Для измерения массы груза (не по- казан) устанавливают, например, устройство вертикально таким образом, чтобы нагрузочная ось 00 совпадала с наг.равлением местной вертикали NN
Q
0
г
0
Груз устанавливают на нагрузочной платформе 7, который под действием гравитационного поля создает усилие
m-g, где F - усилие;
m - масса измеряемого т руза; g - гравитационная постоянная. Усилие создает в силочувствитель- ных кварцевых резонаторах 5 механическое напряжение, вызывающее прямо пропорциональное уиети-гение частоты пьезоэлектрических колебаний а f
где А f - отклонение частоты электрических колебаний каждом силочувствительном кварцевом резонаторе; f, - начальное значение частоты пьезоэлектрических колебаний в каждом силочувствительном кварцевом резонаторе;
D - поперечное сечение сжимаемой части каждого силочувст- вительного кварцевого резонатора;
п - номер гармоники пьезоэ.пекг- рическмх колебаний каждого СИЛО - уиствительного резонатора;
- KO3(bi:;. тциент полезного действия заделки каждого силочув- ствительного кварцевого резонатора при жесткой заделке
1;
G - механическое напряжение в каждом силочувствительном кварцевом резонаторе
5 |Поскольку все силочувствительные кварцевые резонаторы 5, заключенные Б корпусе 2, работают без перемещения (жесткость пьезокварцевого материала примерно в 15 раз выше, чем у корпуса 2, выполненного из стали), то они получают одинаковые (за исключением начального веса конструкции, который имеет постоянное значение и учитывается как систематическая сос- тавляю цая) механические напряжения G и соответственно равные отклонения частоты пьезоэлектрических колебаний Л.
Поэтому имеется возможность состав лять пакет силочувствитепьнь.гч кварцевых резонаторов из требуемого числа
указанных элементов (например, для получения заданной точности измерени и дискретности преобразования).
Соответствующие приросты частоты пьезоэлектрических колебаний суммируются в сумматоре 16, с выхода которого на цифровой индикатор 17 подается электрический сигнал, частота которого имеет суммарное значение.
Таким образом, в сумматоре 6 (пр суммировании) повышается дискретност (число единиц импульсов) на единицу массы груза и точность измерения за I чет компенсации нестационарных флюк ционных отклонений единичных значений частот.
В предлагаемом устройстве имеется возможность устранения температурных воздействий за счет применения разно полярных температурных коэффициентов частоты, имеющих равные абсолютные приросты.
Цифровой индикатор 17 индицирует показания в единицах массы, соответ- ствуюи .их массе измеряемого груза.
После снятия показания величины массы измеряемого груза цикл иэмере-- ния заканчивается, груз снимается с нагрузочной платформы 7 и устройство снова готово к работе.
Введение установленных с возможностью поворота относительно оси симметрии корпуса дополнительной нагру зочной и опорной платформ 8 и 1 1 с фиксаторами и указателями, кинематически связанными с отсчетной щкалой 1А, обеспечивает установку величины силочастотного коэффициента (масштабного коэффициента) при его изменении от действия внешних факторов (например, при старении кварцевых резонаторов) . В этом случае нагрузочную и опорную платформы 8 и 11 перемещают на некоторый угол (в пределах 0-180°, что эквивалентно повороту оси напряжения в тех же пределах), отсчитывае- 1ЫЙ посредством указателей, кинематически связанных с отсчетной шкалой 14. После перемещения нагрузочную и опорную перемещаемые платформы фиксируют с помощью фиксаторов.
Отсчетная шкала 14 и указатели, укрепленные на перемещаемых нагрузочной и опорной платфор 1ах 8 и 1 , необходимы для точной установки указанных платформ eждy собой и для возможности установки npoi-раимируемого зна10
5
0
.5
0
5
0
5
O
5
че)ия угла при известном законе изменения масштабного коэффициента.
Для получения, например, большей чувствительности (для меньших, но более крупногабаритных грузов) используется нагружение по поперечной оси QQ , для чего на основание 1 устанавливают опорную платформу 1I, которую фиксируют с помощью фиксатора 12, а с помощью указателя 13 отмечают ее положение.
Дополнительную нагрузочную плат- Форму 8 устанавливают в положение 180 , отсчитывая значение угла по отсчетной шкале 14 с помощью указателя 10, и фиксируют с помоп ью фиксатора 9
Указанным методом можно установить перемещаемые нагрузочную 8 и опорную 11 платформы в иное положение (каждому положению соответствует определенная силочастотная чувствительность устройства).
После выполнения указанных подготовительных операций устройство готово к работе при нагружении по оси
QQ .
Измеряемый груз устанавливается на дополнительную нагрузочную платформу 8, что вызывает механическое напряжение, действующее на каждый силочувствительный кварцевый элемент 5 аналогично описанному выше, но по соответствующему направлению QQ .
Отклонение частоты пьезоэлектрических колебаний, суммирование и индикация происходят аналогично описанному для нагружения по оси 00 . Результат измерения считывается с цифрового индикатора 17 в единицах массы. После считывания показания цикл измерения заканчивается, груз снимается и устройство снова готово к работе .
Предел измерения в предлагаемом устройстве расширен за счет использования нефиксированного положения (одноосное нагружение), а возможности нагружения по двум взаимно перпендикулярным направлениям, имеющим различные силочастотные коэффициенты.
Формула изобретения
Устройство для ичг.1ерения массы, содержащее корпус с нагрузочной платформой, в котором установлены сило- чувствительные кварцоные резо}1аторы.
возбуждающие электроды которых подключены к электронным возбудителям, соединенным через сумматор с цифровым индикатором, отличающееся тем, что, с целью повьщ1ения надежности за счет увеличения динамической стойкости при одновременном расщире- нии предела измерения, в него введены опорная и дополнительная нагрузоч- ная платформы с соответствующими фиксаторами и указателями положения,установленные с возможностью поворота
относительно оси симметрии корпуса, и отсчетная шкала, закрепленная на корпусе, силочувствительные кварцевые резонаторы выполнены в виде линз а корпус - в виде секционного крис- таллодержателя, причем кварцевые резонаторы установлены между секциями корпуса, а на их торцовых частях, выступаюошх за пределы корпуса, закреплены посредством фиксаторов дополнительная нагрузочная и опорная платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы | 1984 |
|
SU1530932A1 |
| Кварцевый силоизмеритель | 1984 |
|
SU1244513A1 |
| Трехкомпонентный измеритель усилия | 1984 |
|
SU1190216A1 |
| Весоизмерительное устройство | 1984 |
|
SU1206622A1 |
| Устройство для измерения массы | 1983 |
|
SU1476332A1 |
| Многопредельный измеритель усилий | 1985 |
|
SU1278634A1 |
| Карманные весы | 1983 |
|
SU1117453A1 |
| Устройство для измерения массы | 1985 |
|
SU1368648A1 |
| Устройство для измерения массы | 1983 |
|
SU1137323A1 |
| Устройство для измерения массы | 1984 |
|
SU1530933A1 |
Изобретение относится к весоизмерительной технике и может быть использовано для прецизионного взвешивания твердых предметов. Цель изобретения - повышение надежности за счет увеличения динамической стойкости при одновременном расширении предела измерений. На торцах силочувствительных кварцевых резонаторов 5, выполненных в виде линз, установлены дополнительная нагрузочная 8 и опорная 11 платформы с фиксаторами 9,12 и указателями 10,13 положения. Устанавливаемый на нагрузочную платформу 7 груз создает в резонаторах 5 механическое напряжение, вызывающее изменение частоты колебаний. С выхода сумматора 16 на цифровой индикатор 17 поступает электрический сигнал с суммарной частотой. При изменении от действия внешних факторов величины силочастотного коэффициента перемещают платформы 8 и 11 на угол, отсчитываемый с помощью указателей 10 и 13 положения по отсчетной шкале 14 и фиксируют. 1 ил.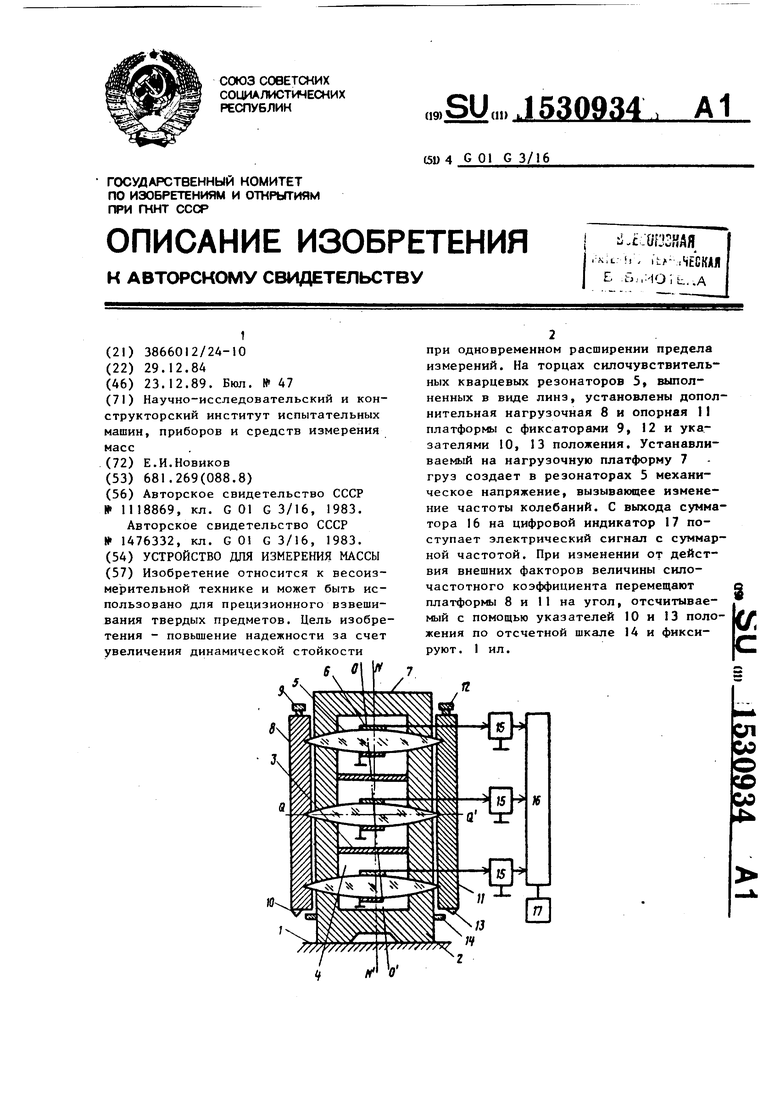
| Карманные весы | 1983 |
|
SU1118869A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы | 1983 |
|
SU1476332A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
