Изобретение относится к силоизме- рителышй технике и может быть исполь зовано при измерении сил кагнитоупру- гимн преобразователями.
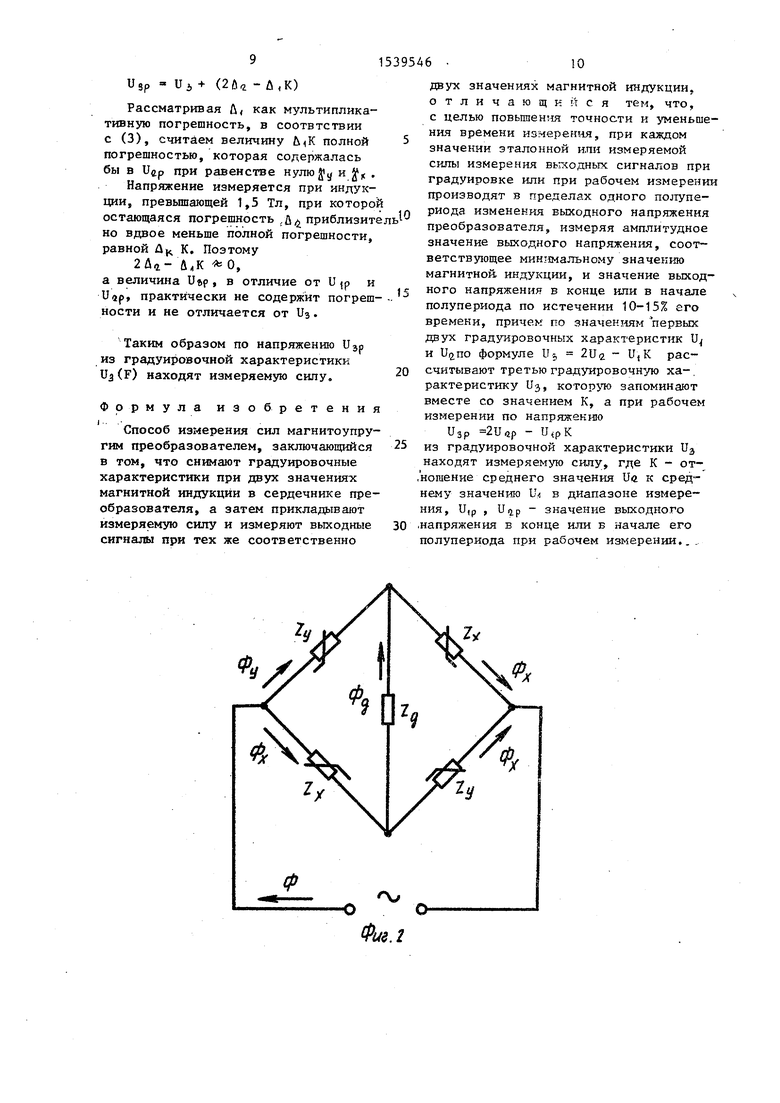
Даль изобретения - повышение точности и уменьшение времени измерения. На фиг. 1 показана схема магнито- упругого преобразователя; на фиг.2 - схема замещения его магнитной цепи в виде магнитного моста; на фиг. 3 - вебер-амперные характеристики.
Магнитоупругий преобразователь (фиг. 1) имеет воспринимающий измеря- емую силу F сердечник 1 в виде пакета ферромагнитных пластин, в центральной части которого имеется четыре отверстия 2, 3, Л, 5 для двух взаимно перпендикулярных обмоток. Намагничива- юшдя обмотка 6 питается переменным током при стабильном напряжении на ее зажимах. С выходной (сигнальной) обмотки 7 снимается напряжение, зависящее от силы F. Выходное напряже- ние измеряется прибором 8,
Намагничивающая обмотка создает ,замыкающийся вокруг отверстий 2 и 3 (фиг. 2) магнитный поток, мгновенное значение которого
Ф Фх + Фу ,
где фх - магнитный поток в горизонтальных участках сердечника, расположенных между
отверстиями 3, 5 и 2, 4; Фу - магнитный поток в вертикальных участках сердечника, расположенных между отверстиями 3, 4 и 2, 5. Под действием силы F магнитное сопротивление вертикальных участков увеличивается. При этом магнитный поток fp перераспределяется между го
ризонтальными и вертикальными участками сердечника, расположенными между отверстиями для обмотки.
На фиг. 2 в измерительную диагональ моста включен элемент, сопротивление которого эквивалентно сопротивлению участков, по которым проходит поток Фу, сцепленный с выходной обмоткой. Плечи моста с сопротивлением Zyявляются активными, т.е. воспринимающими измеряемую величину. Сопротивление Zyзависит от силы F, действующей на магнитоупругий преобразователь. Плечи моста, сопротивление которых обозначено через Z, яв- , ляются компенсационными.
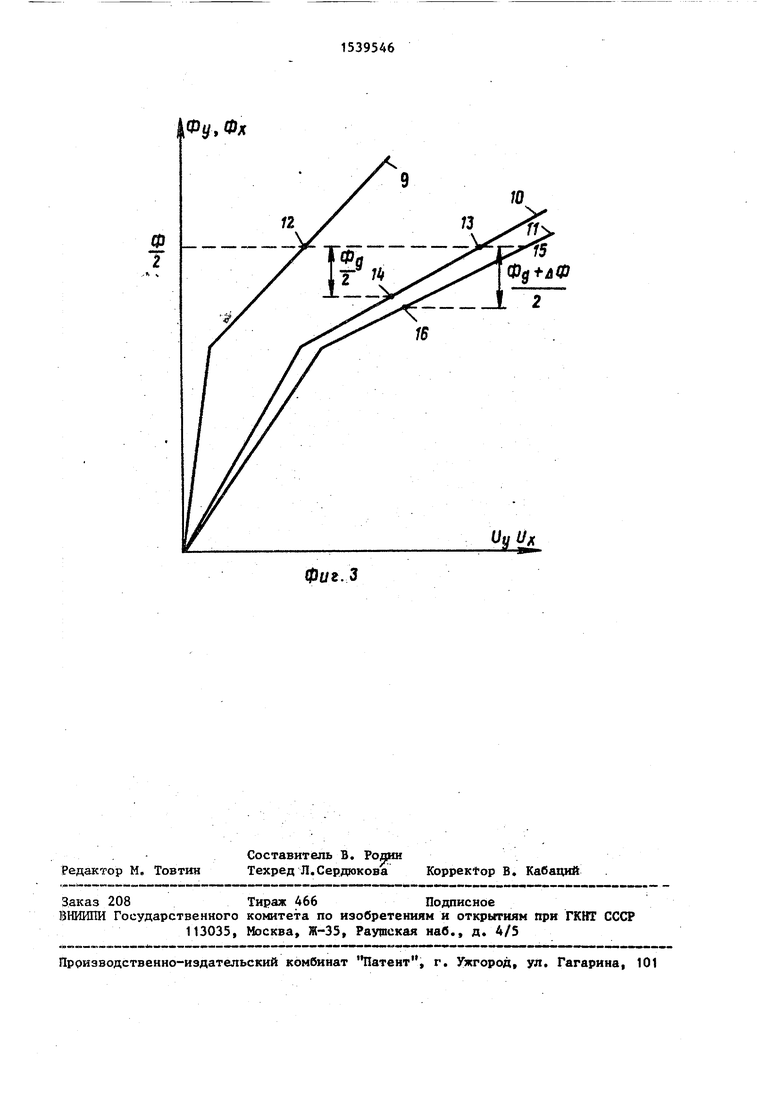
Путам простейшей аппроксимации реальные вебер-амперные характеристики участков сердечника магнитоупругого преобразователя представим ломанными линиями.
На фиг. 3 в координатах мгновенных значений магнитных напряжений и потоков показаны вебер-амперные характеристики плеч моста, приведенного на фиг. 2. Характеристику 9 имеют все плечи моста при градуировке, если действующая на преобразователь сила равна нулю При этом в каждом плече моста поток равен 0,5.
Под действием силы F сопротивление Zy активного плеча увеличивается и его вебер-амперная характеристика принимает вид 10 при градуировке или 11 при рабочем измерении, если есть погрешность. Допустим, что изменение, магнитного состояния активного плеча I под действием силы F совершается в два этапа. В начале при потоке в пле-j
че, равном 0,5 от точки 12 к точке 13 или 15. Затем, на втором этапе, вследствие увеличения сопротивления плеча Zy , поток Фц уменьшается, а после завершения второго этапа, состояние плеча характеризуется точкой
14 при градуировке или 16 при рабочем измерении.
Фиг. 2, 3 и описанная модель изменения магнитного состояния активного плеча под действием силы F позволяет записать

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1224619A2 |
| Способ измерения сил магнитоупругим преобразователем | 1987 |
|
SU1525487A2 |
| Способ измерения сил магнитоупругим преобразователем | 1978 |
|
SU887948A1 |
| Магнитоупругое силоизмерительное устройство | 1988 |
|
SU1597615A1 |
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1272129A2 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2006 |
|
RU2330246C2 |
| ИЗМЕРИТЕЛЬ НАВЕДЕННЫХ ТОКОВ | 1992 |
|
RU2075753C1 |
| Способ измерения силы | 1983 |
|
SU1158878A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2195636C2 |
| Способ поверки терморезисторов | 1977 |
|
SU684341A1 |
Изобретение относится к силоизмерительной технике и может быть использовано при измерении сил магнитоупругими преобразователями. Цель изобретения - повышение точности и уменьшение времени измерения. Запитывают намагничивающую обмотку 6, расположенную в отверстиях 2,3 преобразователя 1, переменным током прямоугольной формы. Градуировку и рабочие измерения выходного сигнала обмотки 7 производят при двух значениях индукции в сердечнике преобразователя 1. Измерения проводят в пределах одного полупериода изменения выходного напряжения преобразователя. Измеряют амплитудное значение U1 или U1P выходного напряжения, соответствующее минимальному значению магнитной индукции, и значение выходного напряжения U2 или U2P в конце или в начале полупериода, когда магнитная индукция близка к своему максимуму. По значениям градуировочных характеристик U1(F) и U2(F) по формуле U3=2U2 - U1K, где K - отношение средних значений напряжений U2(F) к U1(F) в диапазоне измерения, рассчитывают третью градуировочную характеристику U3(F). При рабочем измерении по напряжению U3P=2U2P-U1PK из градуировочной характеристики U3(F) находят измеряемую силу. 3 ил.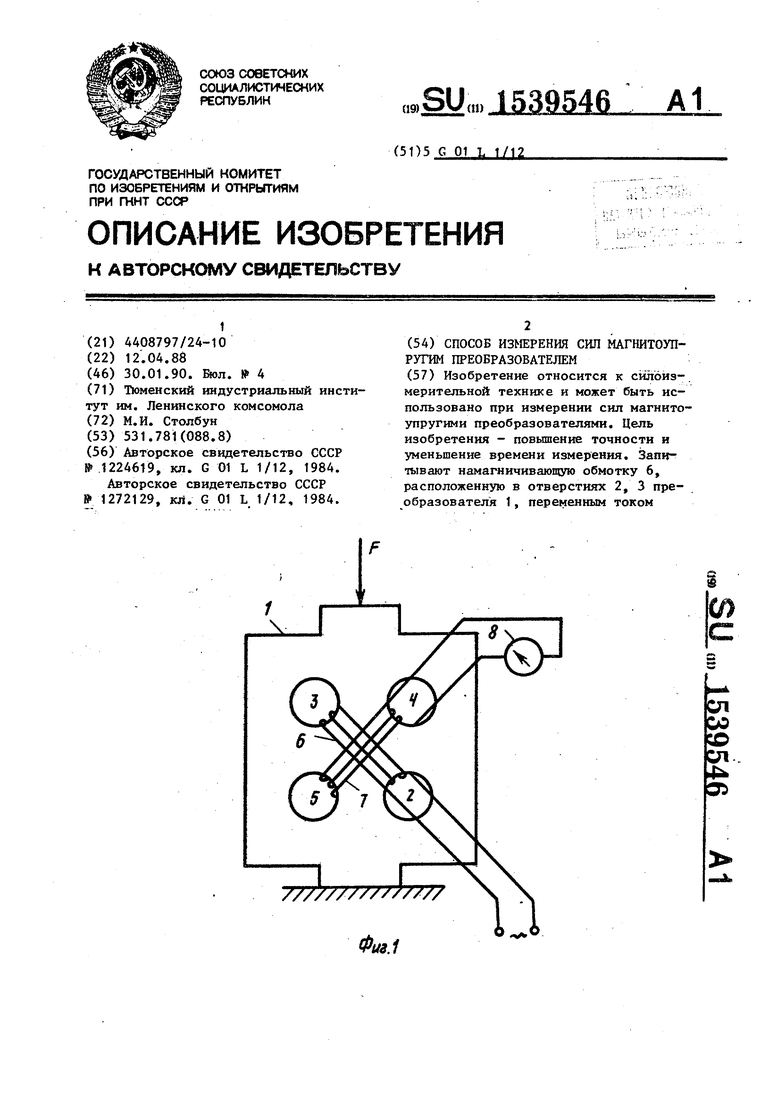
ч - и - из О
U4 (Zm + Лч + SF + U4F) | - (Ry +fly) 31tAfB
Mzm+aof + R,+ft)S±A±
«Pa
Z ФГ+ДФ,
z де Ua, U,, Ug - магнитные напряжения активного и компенсационного плеч и измерительной диагонали моста;
- поток в измерительной диагонали моста при градуировке;
&Ф - часть потока Ф в измерительной диагонали моста, соответствующая погрешности; статическое сопротивление плеча при градуировке при F . 0 при Фу ф, 0,5;
-дифференциальные сопротивления активного и компенсационного плеч соответственно;
-сопротивление измерительной диагонали моста;
чувствительность активного плеча к измеряемой силе F при Фч 0,5 Ф,
R9 RX
51
S
у А
As
- изменения соответственно сопротивления плеч моста Zy, Zx и чувствительности S при Ф Фу 0,5 Я5 по причинам, вызывающим погрешность;
14 У Д°6авочные дифференциальные сопротивления активного и ком(D
0
5
0
5
0
5
0
5
пенсационного плеч моста, возникающие вместе с погрешностью.
Предлагаемый способ измерения основан на зависимости дифференциального манитного сопротивления ферромагнитного тела, находящегося в поле катушки с током и под действием других сил электромагнитной или неэлектромагнитной природы, от числа этих сил.
Под силами в данном случае принимаются механические напряжения, изменение температуры, магнитные напряженности посторонних магнитных полей и все другое, что приводит к изменению магнитного сопротивления ферромагнитного тела.
По принятой здесь модели преобразования при появлении сил, которые отсутствовали при градуировке, возникают добавочные дифференциальные сопротивления V,. и $х . При наличии :основной силы появление еще одной иной или той же природы, но приложенной к сердечнику преобразователя в другом месте или другим способом, обусловливает новое состояние ферромагнитного тела, которое невозможно воспроизвести за счет изменения основной силы.
Для данного анализа зависимость Ry, Rfc от F и влияющих величин не имеет значения. Специально выделены добавочные дифференциальные сопротивления $„, которые возникают вместе с приращениями йу,/ дх статических сопротивлений при появлении
добавочной силы, т.е. при изменении какой-либо влияющей величины по сравнению с ее значением при градуировке.
Добавочные дифференциальные сопро- тивления (ViujVui) возникают, когда влияющие величины изменяют распределение удельного сопротивления в сердечнике, вносят дополнительную неоднородность в это распределение,
Лабораторные исследования, приведенные на преобразователе с сердечником из электротехнической стали марки ЭЗЗО показали, при малом, например при нул евом5 значении индукции в диагональном сечении сердечника между отверстиями для намагничивающей обмотки дополнительное изменение дифференциального сопротивления не возникает. При этом и My равны нулю, а погрешность вдвое больше, чем при большем (более 1,5 Тл) значении индукции,, Эта экспериментально установленная связь между магнитной индукцией и погрешностью положена в основу спо- соба измерения сил.
Способ осуществляется следующим образом.
Зачитывают преобразователь переменным током прямоугольной формы. Онима- ют градуировочные характеристики U (F) и Up(F) и рассчитывают третью градуировочную характеристику UjCF), значение которой определяются из следующего выражения.
U3 2UU - U4K,(2)
где Ut - наибольшее значение выходного напряжения в интервале всего полупериода его измерения (при заданной силе F); и - наибольшее значение выходного напряжения в начальной части, например в первых 15% полупериода, когда индукция близка к своему мак- симальному значению; К - отношение среднего значения Ufj(F) к среднему значению U.j (F) в диапазоне измерения . При прямоугольной форме кривой напряжения намагничивающей обмотки форма напряжения выходной обмотки, как показал эксперимент существенно отличается от прямоугольной. Поэтому выходной сигнал U или зависит от того насколько момент его измерения отстоит от начала полупериода. При этом Ui 7 .
Поскольку величина К определена как отношение среднего значения (F) к среднему значению Ui (F) в диапазоне измерения
и,к и2;
(3)
и,, & и.
При рабочем измерении измеряется обозначенное через U1p наибольшее значение выходного напряжения в течение всего полупериода его изменения.
Максимуму выходного напряжения соответствует нулевое или близкое к нулевому значению магнитного потокаФ При малых значениях потока равны нулю добавочные сопротивления и уменьшение погрешности за счет этих сопротивлений не происходит, вследствие чего выходной сигнал содержит полную погрешность магнитоуправля- емого преобразователя.
Таким образом
Uip U, + См ,(4)
где U,t - значение градуировочной характеристики U(F) при силе F, равной измеряемой силе при рабочем измерении; Д - полная погрешность магнито- упругого преобразователя.
Второе измерение выходного напряжения делается в начале полупериода. При этом сигнал Uijp при рабочем измерении, как и сигнал Ug. при градуировке, измеряется при индукции межд отверстиями для намагничивающей об1- мотки, превышающей 1,5 Тл. При такой индукции погрешность наполовину скомпенсирована за счет появления добавочных сопротивлений „, $% . Выходное напряжение при втором измерении равно
U
ч
и« +Ь ,
(5)
где U«2 - значение градуировочной
характеристики y(t-) при силе F, равной измеряемой силе при рабочем измерении; остающаяся погрешность преобразователя.
Подставляя в формулу
U3P 2U4p- U,pK,(6)
значения U,p и Uap из (4) и (5), получаем выражение
игр Uj + (2/W - ), которое с помощью (2) преобразуем к виду
USp - U3 + (2 ft .г - Д ,K)
Рассматривая Д, как мультипликативную погрешность, в соотвтствии с (3), считаем величину полной погрешностью, которая содержалась бы в Ucp при равенстве нулю fly и ftf .
Напряжение измеряется при индукции, превышающей 1,5 Тл, при которой остающаяся погрешность ,й приблизите но вдвое меньше полной погрешности, равной Дц К. Поэтому
2Лй- 4„К 0,
а величина Uap , в отличие от U (р и Uар практически не содержит погрешности и не отличается от Из
Таким образом по напряжению игр из градуировочной характеристики U(F) находят измеряемую силу.
Формула изобретения
Способ измерения сил магнитоупру- гим преобразователем, заключающийся в том, что снимают градуировочные характеристики при двух значениях магнитной индукции в сердечнике преобразователя, а затем прикладывают измеряемую силу и измеряют выходные сигналы при тех же соответственно
«
двух значениях магнитной индукции, отличающийся тем, что, с целью повьшен 1я точности и уменьшения времени измерения, при каждом значении эталонной или измеряемой силы измерения выходных сигналов при градуировке или при рабочем измерении производят в пределах одного полупеJQ риода изменения выходного напряжения преобразователя, измеряя амплитудное значение выходного напряжения, соответствующее минимальному значению магнитной- индукции, и значение выход15 ного напряжения в конце или в начале полупериода по истечении 10-15% его времени, причем по значениям первых двух градуировочных характеристик U и %по формуле U, 2Vii - U,K pac0 считывают третью градуировочную характеристику из, которую запоминают вместе со значением К, а при рабочем измерении по напряжению U3P 2Uap U,PK
5 из градуировочной характеристики U3 находят измеряемую силу, где К - от- , ношение среднего значения U4 к среднему значению U в диапазоне измерения, и,р , - значение выходного
0 .напряжения в конце или в начале его полупериода при рабочем измерении...
7у
0
Фиг. 2
Фу.Фх
Ф
2
ч
фуг. 3
Ш
+лф
Uyg
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1224619A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения сил магнитоупругим преобразователем | 1984 |
|
SU1272129A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
