36, 39, 4, 44, 45, 48, движков 40, 47, ползунов 37, 42, 46, поперечины 38 и рычага 43 сочленен с движками 19, 20, снабженными фиксаторами 23, 24 и визирами 27, 28, сопряженными
со шкалами 13, 14. Средней частью стержень 49 подвижно и поворотно посредством оси вращения 59 и ползуна 60 сочленен с движком 61, снабженным визиром 62, сопряженным со шкалой 15.1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительное устройство | 1987 |
|
SU1714624A1 |
| Вычислительное устройство | 1987 |
|
SU1649570A1 |
| Вычислительное устройство | 1984 |
|
SU1241263A1 |
| Вычислительное устройство | 1987 |
|
SU1476491A1 |
| Вычислительное устройство | 1985 |
|
SU1283799A1 |
| Вычислительное устройство | 1986 |
|
SU1543424A1 |
| Вычислительное устройство | 1986 |
|
SU1464177A1 |
| Вычислительное устройство | 1985 |
|
SU1290362A1 |
| Вычислительное устройство | 1986 |
|
SU1472921A1 |
| Вычислительное устройство | 1986 |
|
SU1550537A1 |
Изобретение относится к вычислительной технике. Цель изобретения - расширение класса решаемых задач. Основной стержень 35 концом поворотно взаимодействует посредством оси вращения 34 с движком 33. Средней частью основной стержень 35 подвижно и поворотно посредством осей вращения 53, 55, ползуна 56 и тяги 54 сочленен с движком 51, снабженным фиксатором 50 и визиром 52, сопряженным со шкалой 16. Вторым концом основной стержень 35 подвижно и поворотно посредством оси вращения 57 и ползуна 58 сочленен со стержнем 49, который вторым концом подвижно и поворотно посредством осей вращения 36, 39, 41, 44, 45, 48, движков 40, 47, ползунов 37, 42, 46, поперечины 38 и рычага 43 сочленен с движками 19-20, снабженными фиксаторами 23, 24 и визирами 27, 28, сопряженными со шкалами 13, 14. Средней частью стержень 49 подвижно и поворотно посредством оси вращения 59 и ползуна 60 сочленен с движком 61, снабженным визиром 62, сопряженным со шкалой 15. 1 ил.
Изобретение относится к вычислительной технике и предназначено для решения сложных уравнений, например, при расчете показателя эффективности монтажных работ на строящихся пред- приятиях агропромышленного комплекса,,
Цель изобретения - расширение класса решаемых задач.
Предлагаемое устройство позволяет решать задачу оценки эффективности ра бот по монтажу предприятий агропрома:
п fcf&F ,
где ft - показатель эффективности мон- тажных работ на строящихся предприятиях агропромышленного комплекса; К - коэффициент;
m - фактическая продолжительность монтажа объекта (приведенная) ;
п - нормативная продолжительность монтажа объекта (приведенная/ | q - фактический технический уровень комплекта единиц лрЪ- дукции;
1 - нормативный технический уровень комплекта е диниц про- дукции; р - относительный показатель
затрат.
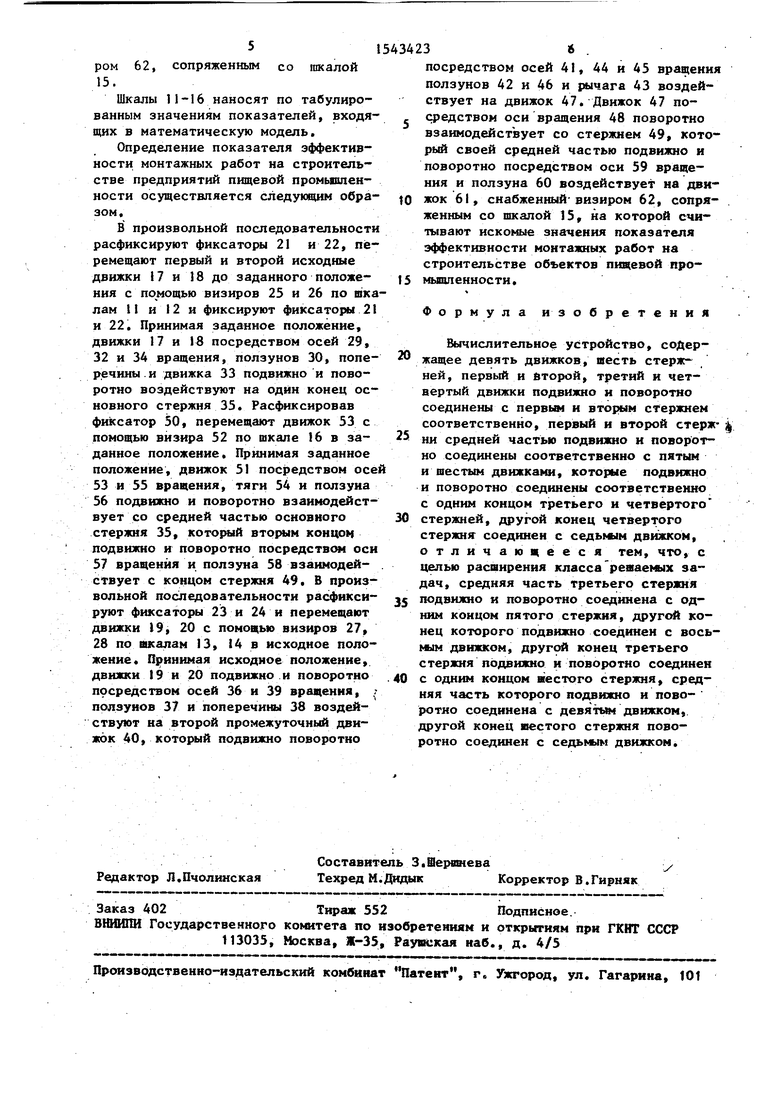
На чертеже показано устройство, общий вид,, один из вариантов.
Устройство содержит планшет I с неподвижно закрепленными на нем направляющими элементами 2-10 с нанесенными на поверхность планшета 1 шкалами П-16. На направляющих элементах 2-5 подвижно-продольно размещены соответственно движки 17-20, снабженные фиксаторами 21-23, 24 и визирами 25-28, сопряженными со шкапами П-14. Движки 17 и 18, принимая заданное положение, подвижно и пово ротно взаимодействуют посредством осей 29 вращения и ползунов 30 с концами поперечины 31, которая своей
,-
,,
са-:
,
- 25 ь ,«
ь т- Q
50
55
средней частью посредством оси вращения 32 поворотно взаимодействует с первым промежуточным движком 33, продольно-подвижно размещеным на направляющей элементе 6. Движок 33 посредством оси 34 поворотно взаимодействует с концом основного стержня 35. Движки 19 и 20, принимая заданное положение, подвижно и поворотно взаимодействуют посредством осей 36 вращения и ползунов 37, с концами поперечины 38, которая своей средней частью посредством оси вращения 39 поворотно взаимодействует с вторым промежуточным движком 40. Движок 40 подвижно и поворотно посредством оси 41 вращения и ползуна 42 взаимодействует с одним концом рычага 43, средней частью поворотно размещенного на оси 44 вращения, закрепленной на планшете 1. Вторым концом рычаг 43 йодвиж- но и поворотно посредством оси 45 вращения и ползуна 46 взаимодействует с движком 47, продольно подвижно размещенным на направляющем элементе 8 и поворотно взаимодействующим посредством оси вращения 48 с одним концом стержня 49. Расфиксировав фиксатор 50, движок 51 перемещают в заданное положение с помощью визира 52 по шкале 16 в заданное положение. Принимая заданное положение, движок 51 посредством оси 53 вращения поворотно взаимодействует с одним концом тяги 54, которая вторым концом подвижно и поворотно посредством оси 55 вращения и ползуна 56 взаимодействует со средней частью стержня 35. Вторым концом стержень 35 подвижно и поворотно взаимодействует со стержнем 49 посредством оси 57 вращения и ползуна 58. Стержень 49, поворачиваясь вокруг оси 48, своей средней частью подвижно и поворотно посредством оси 59 вращения и ползуна 60 взаимодействует с движком 61 подвижно-продольно размещенным на направляющем элементе 9 и снабженным визи62, сопряженным со шкалой
ром 15.
Шкалы 11-16 наносят по табулированным значениям показателей, входящих в математическую модель.
Определение показателя эффективности монтажных работ на строительстве предприятий пищевой промышленности осуществляется следующим образом,
В произвольной последовательности расфиксируют фиксаторы 21 и 22, перемещают первый и второй исходные движки 17 и 18 до заданного положения с помощью визиров 25 и 26 по шкалам II и 12 и фиксируют фиксаторы 21 и 22. Принимая заданное положение, движки 17 и 18 посредством осей 29, 32 и 34 вращения, ползунов 30, поперечины и движка 33 подвижно и поворотно воздействуют на один конец основного стержня 35. Расфнксировав фиксатор 50, перемещают движок 53 с помощью визира 52 по шкале 16 в заданное положение. Принимая заданное положение, движок 51 посредством осе 53 и 55 вращения, тяги 54 и ползуна
56подвижно и поворотно взаимодействует со средней частью основного стержня 35, который вторым концом подвижно и поворотно посредством оси
57вращения и ползуна 58 взаимодействует с концом стержня 49. В произвольной последовательности расфиксируют фиксаторы 23 и 24 и перемещают движки 19, 20 с помощью визиров 27, 28 по шкапам 13, 14 в исходное положение. Принимая исходное положение, движки 19 и 20 подвижно и поворотно посредством осей 36 и 39 вращения, ползунов 37 и поперечины 38 воздействуют на второй промежуточный движок 40, который подвижно поворотно
5
0
посредством осей 41, 44 и 45 вращения ползунов 42 и 46 и рычага 43 воздействует на движок 47. Движок 47 по, средством оси вращения 48 поворотно взаимодействует со стержнем 49, который своей средней частью подвижно и поворотно посредством оси 59 вращения и ползуна 60 воздействует на дви0 люк 61, снабженный-визиром 62, сопряженным со шкалой 15, на которой считывают искомые значения показателя эффективности монтажных работ на строительстве объектов пищевой промышленности.
Формула изобретения
Вычислительное устройство, содержащее девять движков, шесть стержней, первый и второй, третий и четвертый движки подвижно и поворотно соединены с первым и вторым стержнем соответственно, первый и второй стерж- ф ни средней частью подвижно и поворотно соединены соответственно с пятым и шестым движками, которые подвижно и поворотно соединены соответственно с одним концом третьего и четвертого
0 стержней, другой конец четвертого стержня соединен с седьмым движком, отличающееся тем, что, с целью расширения класса решаемых задач, средняя часть третьего стержня
5 подвижно и поворотно соединена с одним концом пятого стержня, другой конец которого подвижно соединен с восьмым движком, другой конец третьего стержня подвижно и поворотно соединен
0 с одним концом шестого стержня, средняя часть которого подвижно и ново- ротно соединена с девятым движком, другой конец шестого стержня поворотно соединен с седьмым движком.
5
| Вычислительное устройство | 1985 |
|
SU1290362A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вычислительное устройство | 1986 |
|
SU1464177A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| SI | |||
