Изобретение относится к сельскому хозяйству и может быть использовано при автоматизации водораспределения в оросительных, системах (в ирригации).
Целью изобретения является повышение оперативности управления и расширение функциональных возможностей устройства.
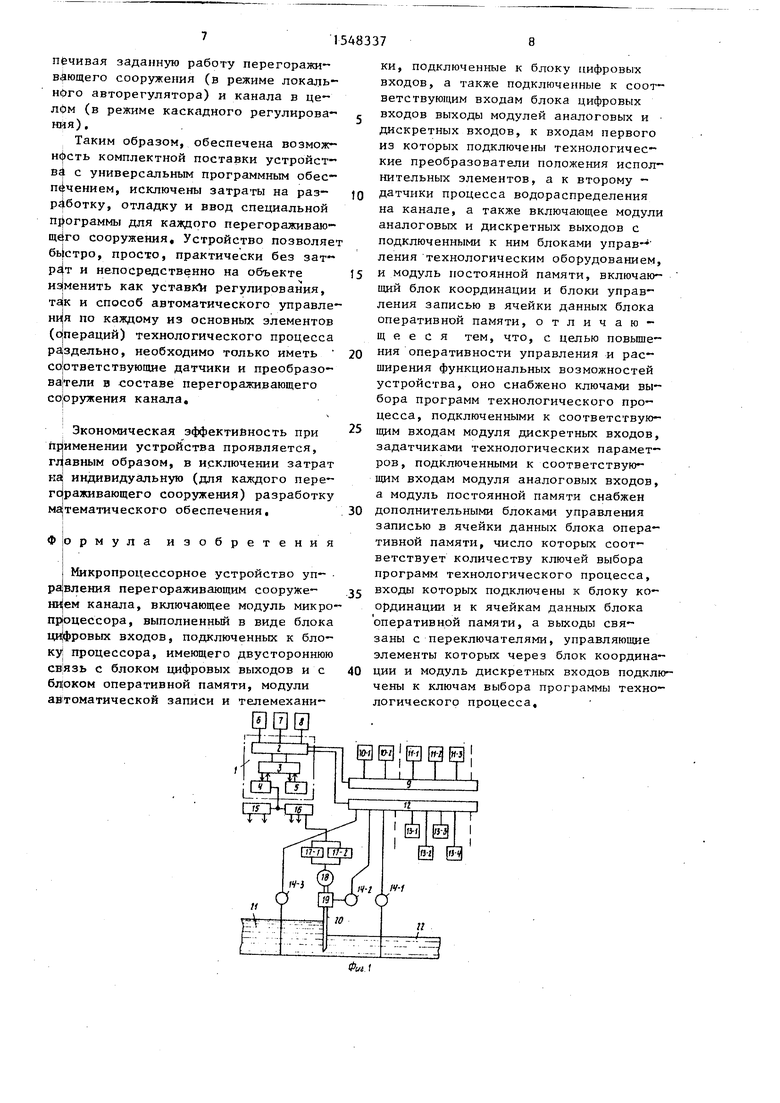
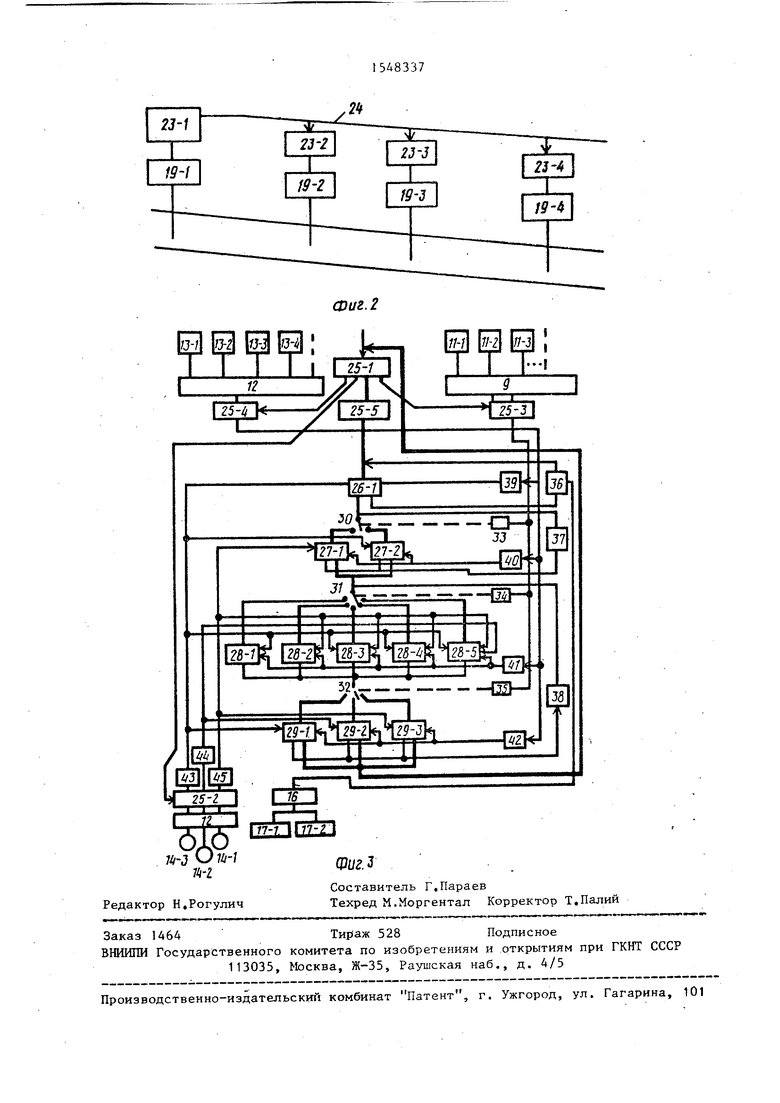
На фиг.1 представлена общая схема микропроцессорного устройства для управления перегораживающим сооружением канала в увязке с технологическим оборудованием; на фиг.2 - схема водораспределения канала с перегораживающими сооружениями; на фиг.З - схема водораспределения канала с перегораживающими сооружениями.
Микропроцессорное устройство для управления перегораживающим сооружением канала включает модуль 1 процессора, имеющий блок 2 цифровых
входов, процессор 3, блок 4 цифровых выходов и блок 5 оперативной памяти, ; Устройство включает также модуль 6 постоянной памяти, модуль 7 автоматического запуска, модуль 8 телемеханики и модуль 9 дискретных входов. Последний соединен с технологическими датчиками 10-1, 10-2,... и ключами 11-1, 11-2,.,. выбора программы, а модуль 12 аналоговых входов соединен с задатчиками 13-1, 13-2,... и преобразователями 14-1, 14-2,,,. технологических параметров. Модули аналоговых 15 и дискретных )6 выходов соединены с устройствами 17-1, 17-2,.,, управления технологическим оборудованием (шкафы управления, пускатели и т.п.) двигателей 18, свят занных с приводом 19 исполнительных механизмов 20 (затворы, щиты и т.п.), регулирующих переток воды из верхнего 21 s нижний 22 бьефы перегоражиел
Ј
00
&э
ОЭ
1
вающего сооружения, К модулям аналоговых и дискретных выходов посредством блока 23-1 управления перегораживающими сооружениями могут присоединяться блоки 23-2 ... 23-4 управления нижележащих участков. Управление осуществления по линии 24 связи посредством приводов 19-1... 19-4 исполнительных механизмов (затворов) .
Перегораживающие сооружения имеют определенный набор датчиков (релейных сигнализаторов: концевые выключатели, блок-контакты, температурные реле и т.п. - не показаны) и преобразователей (пропорциональное преобразование технологических параметров в токовый сигнал, частоту, код, напряжение) , основными из которых являются преобразователи 14-3, 14-1 и 14-2 соответственно уровней (наполнения) воды верхнего и нижнего бьефов и положения (величины открытия) затвора. Могут использоваться и другие преобразователи, например, расхода.
Модуль 6 постоянной памяти содержит (фиг.З) блок 25 координации (показан в виде функциональных элементов 25-1...25-5), блок 26 управления, дополнительные блоки 27-1 и 27- управления режимами заполнения, дополнительные блоки 28-1,,.28-5 управления для формирования величины отклонения и дополнительные блоки 29-1.«,29-3 управления законами регулирования. Дополнительные блоки управления снабжены на входах переключателями 30,0132, имеющими управляющие элементы 33,, «35, Кроме того, модуль 6 постоянной памяти включает блоки 36,,,38 регулирования, которые связаны между собой с ячейками 39.,. 42 уставок и ячейками 43.,,45 данных блока 5 оперативной памяти.
Особенности компоновки и оборудования перегораживающих сооружений предопределяют возможность десятков схем блоков и вариантов программ управления ими. Микропроцессорное устройство упрощает управление тем, что это многообразие обобщается небольшим числом элементов техпроцесса, основные из которых: защита от переполнения, режим начального заполнения канала, формирование величины отклонения режима и управляющего воздействия, а также (иногда) распре
0
5
0
5
0
5
0
5
0
5
деления регулирования между несколькими затворами многопролетного сооружения (эти элементы техпроцесса имеют ограниченное число известных вариантов реализации, обычно 2 или 3).
Именно такой концепции построения соответствует структура блоков управления (фиг.З), содержащих блок 26-1 управления защитой, блоки 27-1 и 27-2 управления режимом заполнения канала соответственно снизу и сверху, блоки 28-1 о,.28-5 управления для формирования величины отклонения по всем известным схемам (способам) управления: стабилизация уровней верхнего и нижнего бьефа, стабилизация перепада и отношения отклонении уровней и другие. Аналогично этому построены блоки 29-1,.,29-3 вариантов законов регулирования: пропорциональный , пропорционально-дифференциальный , пропорционально-дифференциально-интегральный. Блоки других элементов технологического процесса, в частности распределения регулировок между затворами, не показаны, они присоединены аналогично.
Схемы и алгоритмы работы всех блоков управления известны. Они сравнивают значения фактических данных о параметрах режима, состоянии оборудования и расчетные величины, которые блок 25 координации определил (по результату опроса датчиков 10-1, 10-2.., и преобразователей 14-1... 14-3) и зафиксировал в ячейках 43,,. 45 данных, со значениями, зафиксированными в ячейках 39,,.42 уставок. Величины-условия, которые не могут изменяться, записаны при программировании, а те величины, которые могут корректироваться, заносит блок 25 координации по результату опроса задатчиков 13-1, 13-2,,,, (или блок 8 телемеханики). Если по результату сравнения изменять состояние оборудования не трубется, тогда осуществляется перехо д к очередному блоку управления, в противном случае соответствующий блок 36, 37 или 38 регулирования выдает команду на предусмотренную изменяемую операцию техпроцесса. Переход к очередному блоку управления производится поспе выполнения этой операции, что фиксируется
по изменению в соответствующих ячейках 43...45 данных.
Ключи 11-1.,,11-3 выбора программы через блок 25 координации и соответствующие управляющие элементы 33,,.35 однозначно определяют положение переключателей 30,,.32, Это обеспечивает возможность выбрать один (из десяти возможных) вариант схемы управления перегораживающим сооружением .(и каналом в целом) путем переключения нескольких ключей выбора программ. Одной ячейке с 39 по 45 (фиг.З) фактически может соответствовать несколько машинных ячеек с полным набором данных, необходимых для работы связанного с этими ячейками блока управления.
Устройство работает следующим образом.
Перед включением в работу в соответствии с особенностями компановки и конкретного состава оборудования данного перегораживающего сооружения устанавливается положение ключей 11-1,.,11-3 выбора программы и за- датчиков 13-1...13-3, После включения питающего напряжения модуль 7 автоматического запуска включает в работу модуль I процессора и устройство начинает работу по программе, записанной в модуле 6 постоянной памяти. При этом осуществляются, в частности, следующие операции.
Блок 25-2 координации (фиг.З) через модуль 12 аналоговых входов опрашивает технологические преобразователи 14-1...14-3 и датчики 10-1 и 10-2 и соответствующие значения заносят в ячейки 43,,,45 данных. Блок 25-3 опрашивает ключи 11-1...11-3 выбора программы и устанавливает переключатели 30.,,32 в положение, которое соответствует выбранной для данного объекта схеме автоматизации. Блок 25-4 опрашивает задатчики 13-1,, 13-4 и установленные при наладке соответствующие значения заносит в ячейки 39.,.42 уставок. После этого блок 25-5 координации включает в работу блок 26-1 управления (защита верхнего бьефа от переполнения), который сравнивает сигнал с выхода ячеек данных 43 и уставок 39 Если из сравнения следует, что уровень воды в верхнем бьефе не превысил установленное значение, тогда управление передается очередному блоку 27-1 или
483376
27-2, если превысил, тогда блок 26-1 через блок 36 регулирования и модуль 16 дискретных выходов включает устройство 17-1 управления, которое открывает затвор 20 (через двигатель 18 и привод 19). Этот процесс продолжается до тех пор, пока фактический уровень воды в верхнем бьефе
0 (значение из ячейки 43 данных) не снизится до установленного (в ячейке 39 уставок).
Выбранный переключателем 30 блок, например 27-2 (заполнение сверху),
15 сравнивает фактический уровень воды в верхнем бьефе (из ячейки 43) с заданным в ячейке 40 минимальным значением. Если первая величина больше (канал работает), управление пере20 дается очередному блоку, если меньше (канал только наполняется), тогда блок 27-2 управления через блок 37 регулирования обеспечивает полное закрытие затвора 20,
25 Такое состояние сохраняется до тех пор, пока верхний бьеф не заполнится (значение уровня в ячейке 43 не превысит значение в ячейке 40), после чего устройство переходит в
30 основной режим работы, когда управление передается выбранному переключателем 31 блоку 28, например блоку 28-3 (стабилизация перепада уровней между бьефами). Блок 28-3 сравнивает разность уровней в ячейках 43 и 45 с заданным в ячейке 41 значением, определяет величину отклонения и передает управление выбранному переключателем 32 блоку, например бло-
ДО ку 29-1, Последний сравнивает полученное значение величины отклонения с заданным значением зоны нечувствительности (из ячейки 42), Если отклонение меньше, регулировка не про-
д5 изводится и управление передается блоку 25-1 координации, если же режим водораспределения вышел за установленные пределы (отклонение больше), тогда управление передается
50 блоку 38 регулирования, и последний прикрывает или открывает (направление действия определяется знаком разности отклонения и уставки) затвор 20 до тех пор, пока не выполни-
ее ется установленное соотношение сигналов с ячеек данных 43 и 45 и уставок 41 и 42, после чего управление передается блоку 25 координации. Далее весь процесс повторяется, обес-
35
печивая заданную работу перегораживающего сооружения (в режиме локаль- нфго авторегулятора) и канала в це- лфм (в режиме каскадного регулирования) .
Таким образом, обеспечена возмож- н( комплектной поставки устройства с универсальным программным обес- п чением, исключены затраты на раз- Р4ботку, отладку и ввод специальной программы для каждого перегораживаю- щ4го сооружения. Устройство позволяет бь|стро, просто, практически без зат- ра|т и непосредственно на объекте изменить как уставки регулирования, та{к и способ автоматического управлений по каждому из основных элементов (операций) технологического процесса рфдельно, необходимо только иметь соответствующие датчики и преобразователи в составе перегораживающего сооружения канала.
Экономическая эффективность при применении устройства проявляется, главным образом, в исключении затрат ка| индивидуальную (для каждого пере- гф аживающего сооружения) разработку математического обеспечения.
Ф
ормула изобретения
Микропроцессорное устройство управления перегораживающим сооружением канала, включающее модуль микро процессора, выполненный в виде блока цифровых входов, подключенных к блоку процессора, имеющего двустороннюю связь с блоком цифровых выходов и с блоком оперативной памяти, модули автоматической записи и телемеханиПП 71 (7
о
ки, подключенные к блоку цифровых входов, а также подключенные к соответствующим входам блока цифровых
входов выходы модулей аналоговых и дискретных входов, к входам первого из которых подключены технологические преобразователи положения исполнительных элементов, а к второму датчики процесса водораспределения на канале, а также включающее модули аналоговых и дискретных выходов с подключенными к ним блоками управ- ления технологическим оборудованием,
и модуль постоянной памяти, включающий блок координации и блоки управления записью в ячейки данных блока оперативной памяти, отличающееся тем, что, с целью повыше-
ния оперативности управления и расширения функциональных возможностей устройства, оно снабжено ключами выбора программ технологического процесса, подключенными к соответствую-
щим входам модуля дискретных входов, задатчиками технологических параметров, подключенными к соответствующим входам модуля аналоговых входов, а модуль постоянной памяти снабжен
дополнительными блоками управления записью в ячейки данных блока оперативной памяти, число которых соответствует количеству ключей выбора программ технологического процесса,
входы которых подключены к блоку координации и к ячейкам данных блока оперативной памяти, а выходы связаны с переключателями, управляющие элементы которых через блок координа- ции и модуль дискретных входов подключены к ключам выбора программы технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования водораспределения открытого канала | 1983 |
|
SU1124262A1 |
| Система регулирования водораспределения открытого канала | 1981 |
|
SU1042000A1 |
| Система управления водоподачей в канале с перегораживающими сооружениями и головной насосной станцией | 1986 |
|
SU1518448A1 |
| Система вододеления в конечном створе подводящего канала | 1987 |
|
SU1541347A1 |
| Способ водораспределения на канале с машинным водозабором | 1985 |
|
SU1303660A1 |
| СИСТЕМА ВОДОРАСПРЕДЕЛЕНИЯ НА КАНАЛЕ-ОРОСИТЕЛЕ | 2005 |
|
RU2297495C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ УРОВНЕЙ ВОДЫ В ИРРИГАЦИОННЫХ КАНАЛАХ | 1971 |
|
SU420728A1 |
| Система автоматического регулирования расходов воды (его варианты) | 1981 |
|
SU1043605A1 |
| Способ водораспределения на рисовых оросительных системах | 1983 |
|
SU1155199A1 |
| Устройство регулирования водоподачи на участке канала с перегораживающими сооружениями | 1985 |
|
SU1331454A1 |
Изобретение относится к сельскому хозяйству, к области мелиорации и иррепации. Цель изобретения - повышение оперативности управления и расширение функциональных возможностей устройства. Для этого оно содержит модуль процессора и соединенные с ним модули аналоговых и дискретных входов, связанные с технологическими преобразователями и датчиками. Устройство позволяет непосредственно на объекте изменить уставки регулирования и выбирать требуемый закон автоматического управления каждым из основных элементов технологического оборудования и процесса. 4 ил.
Фиг. 2
0-7 Ш Ш РМ
--1Ж1 2ш --rTzs-l
ыии; Т Т Т-
| Автоматизация гидромелиоративных систем: Сб | |||
| научных трудов СевНИИГиМ | |||
| - Л., 1983, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
