Изобретение относится к контрольно-измерительной технике и может быть использовано для определения положения границ объектов.
Цель изобретения - повышение точности за счет уменьшения влияния шумов.
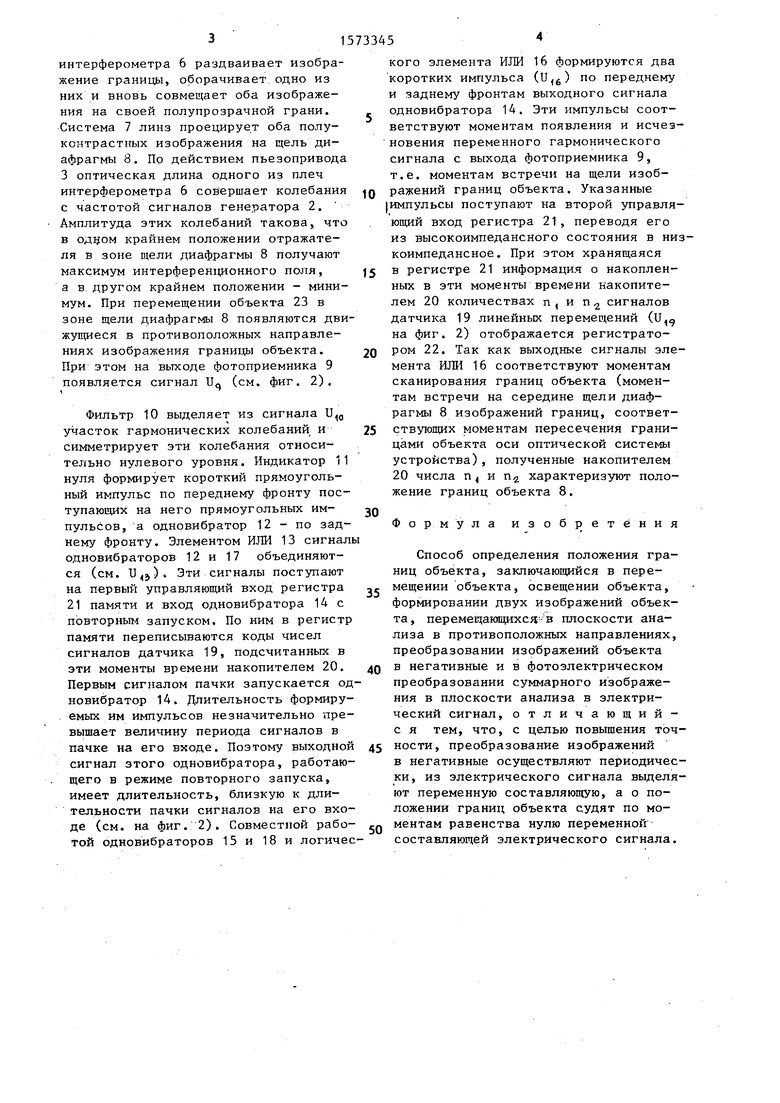
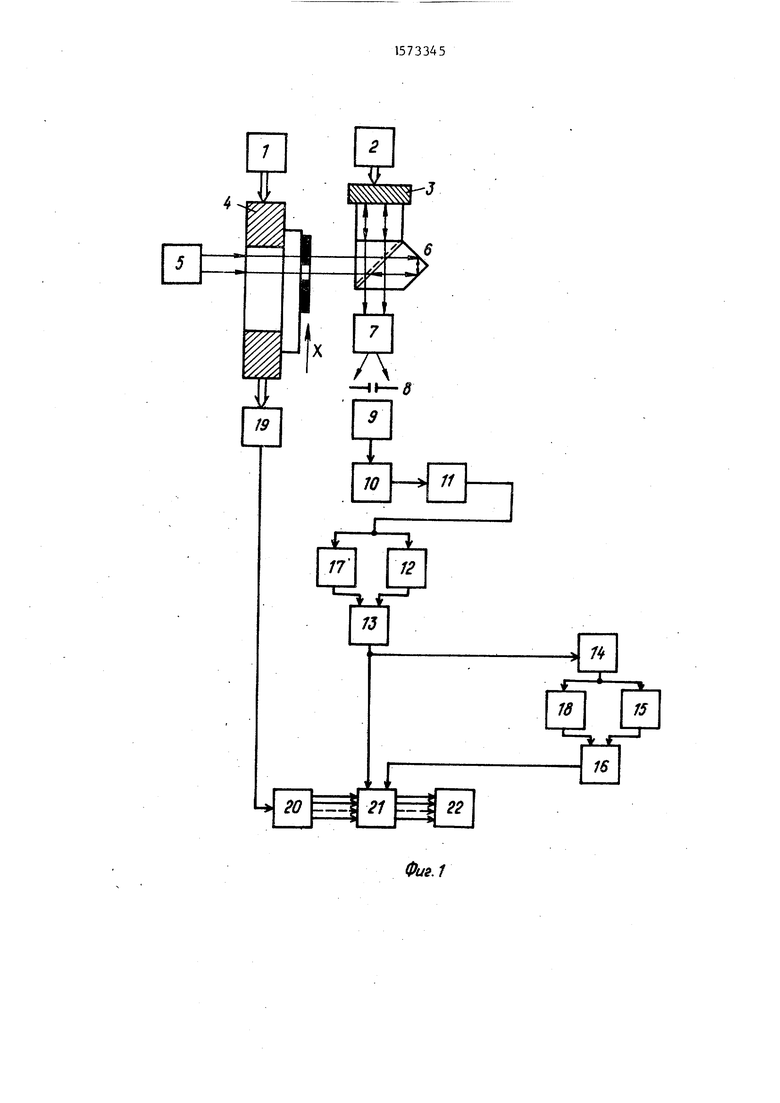
На фиг. 1 представлена блок-схема устройства, реализующего способ; на фиг. 2 - эпюры напряжений на выходах блоков устройства.
Устройство состоит из привода 1, генератора 2, пьезопривода 3, вход которого подключен к выходу генератора, блока 4 перемещения объекта, механически связанного с приводом 1, оптически связанных источника 5 света, интерферометра 6 с оборачивающей , призмой, одно из плеч которого механически связано с пьезоприводом 3, системы 7 линз, диафрагмы 8 и фотоприемника 9, последовательно соединенных фильтра 10, вход которого
подключен к выходу фотоприемника 9, индикатора 11 нуля, одновибратора 12, элемента ИЛИ 13, одновибратора 14 с повторным запуском, одновибра- тора 15 и элемента ИЛИ 16, одновибратора 17, включенного между выходом индикатора 11 и вторым входом элемента 13, одновибратора 18, включенного между выходом одновибратора 14 и вторым входом элемента 16, последовательно соединенных датчика 19 линейных перемещений, механически связанного с блоком 4, накопителя 20, регистра 21 памяти и регистратора 22, управляющие входы регистра 21 подключены к выходам элементов 13 и 16.
Способ осуществляется следующим образом.
Объект 23 освещают источником 5 и перемещают в направлении X. Граница объекта перпендикулярна направлению перемещения. Оборачивающая призма
(Л
ел з
ОЭ GO 4
СЛ
интерферометра 6 раздваивает изображение границы, оборачивает одно из них и вновь совмещает оба изображения на своей полупрозрачной грани. Система 7 линз проецирует оба полуконтрастных изображения на щель диафрагмы 8„ По действием пьезопривода 3 оптическая длина одного из плеч интерферометра 6 совершает колебания с частотой сигналов генератора 2. Амплитуда этих колебаний такова, что в одном крайнем положении отражателя в зоне щели диафрагмы 8 получают максимум интерференционного поля, а в другом крайнем положении - минимум. При перемещении объекта 23 в зоне щели диафрагмы 8 появляются движущиеся в противоположных направлениях изображения границы объекта. При этом на выходе фотоприемника 9 появляется сигнал UQ (см. фиг. 2).
Фильтр 10 выделяет из сигнала U
ю
участок гармонических колебаний и симметрирует эти колебания относительно нулевого уровня. Индикатор 11 нуля формирует короткий прямоугольный импульс по переднему фронту поступающих на него прямоугольных импульсов, а одновибратор 12 - по заднему фронту. Элементом ИЛИ 13 сигналы одновибраторов 12 и 17 объединяются (см. ). Эти сигналы поступают на первый управляющий вход регистра 21 памяти и вход одновибратора 14 с повторным запуском. По ним в регистр памяти переписываются коды чисел сигналов датчика 19, подсчитанных в эти моменты времени накопителем 20. Первым сигналом пачки запускается одновибратор 14. Длительность формируемых им импульсов незначительно превышает величину периода сигналов в пачке на его входе. Поэтому выходной сигнал этого одновибратора, работающего в режиме повторного запуска, имеет длительность, близкую к длительности пачки сигналов на его входе (см, на фиг. 2). Совместной работой одновибраторов 15 и 18 и логичес
0
5
0
5
0
5
0
кого элемента ИЛИ 16 формируются два коротких импульса (U,6) по переднему и заднему фронтам выходного сигнала одновибратора 14. Эти импульсы соответствуют моментам появления и исчезновения переменного гармонического сигнала с выхода фотоприемника 9, т.е. моментам встречи на щели изображений границ объекта. Указанные импульсы поступают на второй управляющий вход регистра 21, переводя его из высокоимпедансного состояния в низ- коимпедансное. При этом хранящаяся в регистре 21 информация о накопленных в эти моменты времени накопителем 20 количествах п , и n 2 сигналов датчика 19 линейных перемещений (U1 на фиг. 2) отображается регистратором 22. Так как выходные сигналы элемента ИЛИ 16 соответствуют моментам сканирования границ объекта (моментам встречи на середине щели диафрагмы 8 изображений границ, соответствующих моментам пересечения границами объекта оси оптической системы устройства), полученные накопителем 20 числа n 4 и п2 характеризуют положение границ объекта 8.
Формула изобретения
Способ определения положения границ объекта, заключающийся в перемещении объекта, освещении объекта, формировании двух изображений объекта, перемещающихся в плоскости анализа в противоположных направлениях, преобразовании изображений объекта в негативные и в фотоэлектрическом преобразовании суммарного изображения в плоскости анализа в электрический сигнал, отличающий- с я тем, что, с целью повышения точности, преобразование изображений в негативные осуществляют периодически, из электрического сигнала выделяют переменную составляющую, а о положении границ объекта судят по моментам равенства нулю переменной составляющей электрического сигнала.
го
22
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения границ объекта | 1990 |
|
SU1703968A1 |
| Способ определения положения границыОб'ЕКТА | 1979 |
|
SU849000A1 |
| Устройство для измерения размеров элементов микроструктур | 1983 |
|
SU1128118A1 |
| Установка для контроля размеров элементов фотошаблонов | 1981 |
|
SU968605A1 |
| Измеритель координат элементов объектов | 1990 |
|
SU1744446A1 |
| Устройство для записи растровых изображений | 1989 |
|
SU1711113A1 |
| Способ контроля диаметра микропроволоки | 1985 |
|
SU1298533A2 |
| Двухкоординатный фотоэлектрический автоколлиматор | 1987 |
|
SU1509806A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1228281A1 |
| Устройство для измерения размеров изделий | 1983 |
|
SU1185080A1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышение точности за счет уменьшения влияния шумов. Способ заключается в гармоническом преобразовании развернутых навстречу друг другу изображений движущегося объекта из позитивных в негативные, фотоэлектрическом преобразовании суммарного изображения, выделении переменной составляющей из полученного при преобразовании сигнала и определении положения границ по моментам равенства нулю переменной составляющей. 2 ил.
Ц
t
Ми Mill 11 (иным и i
. л I.Пi
- ffr .
/72
| Способ дефектоскопии магнитныхплЕНОК | 1979 |
|
SU849060A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
