Изобретение относится к технике оптических измерение и может быть использовано для определения фомы волнового фронта оптического излучения, в частности для определения угловых координат источника оптического излучения.
Целью изобретения является повышение надежности путем упрощения оптической схемы за счет снижения требований к оптическим характеристикам приемной оптической системы и применения одного механического привода для перемещения маски.
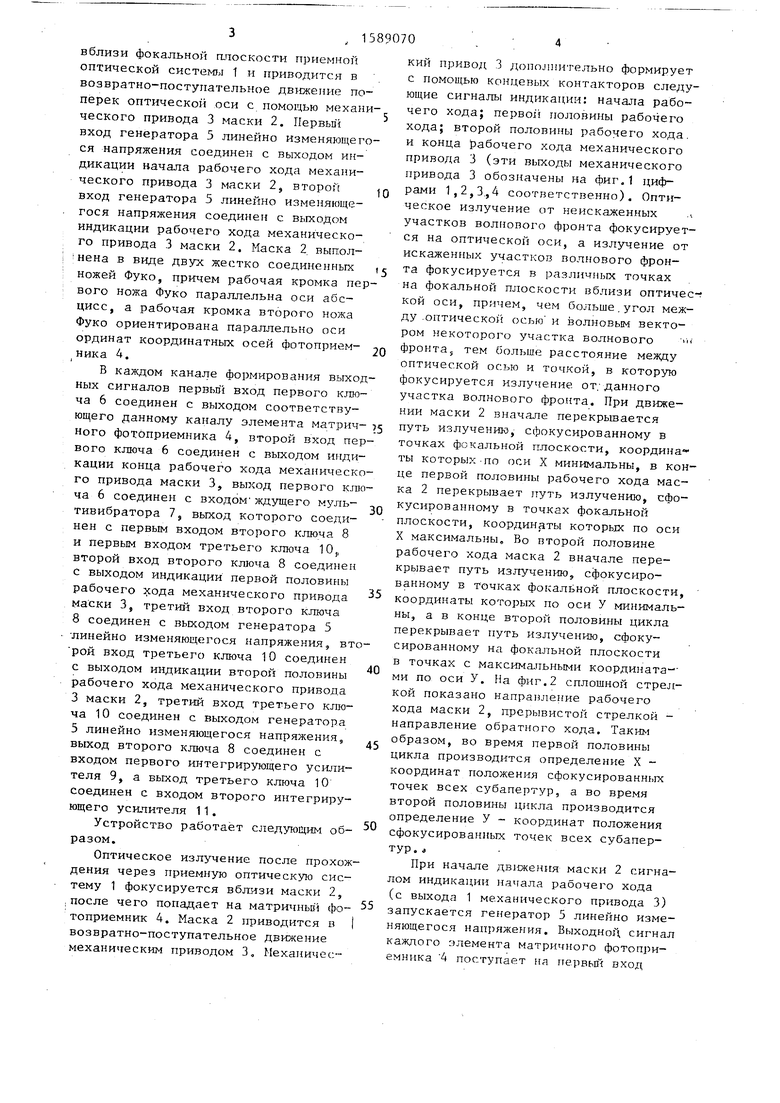
На фиг.1 приведена функциональная схема предлагаемого устройства; на фиг.2 - один из вариантов выполнения маски и направление ее движения по
отношении к анализируемому сфокусированному излучению.
Устройство содержит приемную оптическую систему 1, маску 2, механический привод 3 маски 2,матричный фо- топриемник 4, генератор 5 линейно изменяющегося напряжения, первый ключ 6, ждущий мультивибратор 7, второй ключ 8, первый интегрирукйций усилитель 9, третий ключ 10, второй интег: грирующий усилитель 1.1, сфокусированное пятно 12.
Для простоты на фиг.1 изображены три канала формирования выходных сигналов. На оптической оси последовательно расположены приемная оптическая система 1, маска 2, матричный фотоприемник 4, Маска 2 расположена
сд
00
со
5
10
, 1589070
вблизи фокальной плоскости приемной оптической системл 1 и приводится в возвратно-поступательное движение поперек оптической оси с помощью механического привода 3 маски 2, Первьш вход генератора 5 линейно изменяющегося напряжения соединен с выходом индикации начала рабочего хода механического привода 3 маски 2, второй вход генератора 5 линейно изменяющегося напряжения соединен с выходом индикации рабочего хода механического привода 3 маски 2. Маска 2 выполнена в виде двух жестко соединенных , ножей Фуко, причем рабочая кромка первого ножа Фуко параллельна оси абс- Цисс, а рабочая кромка второго ножа Фуко ориентирована параллельно оси ординат координатных осей фотоприем- ,Ника 4.
В каждом канале формирования выходных сигналов nepBbrii вход первого ключа Ь соединен с выходом соответству 5
20
кий привод 3 допол П1тельно формир с помощью концевых контакторов сл ющие сигналы индикации: нача1га ра чего хода; первой половины рабоче хода; второй половины рабочего хо и конца рабочего хода механическо привода 3 (эти выходы механическо привода 3 обозначены на фиг,1 циф рами 1,2,3.,4 соответственно). Опти ческое излучение от неискаженных участков волнового фронта фокусиру ся на оптической оси, а излучение искаженных участков волнового фрон та фокусируется в различных точках на фокальной плоскости вблизи опти кой оси, причем, чем больше угол м ду .оптической осью- и волновым вект ром некоторого участка волнового фронта, тем больше расстояние меад оптической осью и точкой, в котору
ющегс данному каналу элементГматрич перекрывается иого фотбприемника 4, второГахо п - ,.. в
J I t-i ic п i ct I РИЧ-
ного Фотбприемника 4, второй вход пер- вого ключа 6 соединен с выходом индикации конца рабочего хода механического привода маски 3, выход первого ключа b соединен с входом ждущего мультивибратора 7, выход которого соединен с первым входом второго ключа 8 и первым входом третьего ключа 10 второй вход второго ключа В соединен с выходом индикации первой половины рабочего хода механического привода маски 3, трети:- вход второго ключа « соединен с выходом генератора 5 -линейно изменяющегося напряжения, второй вход третьего ключа 10 соединен с выходом индикации второй половины рабочего хода механического привода 3 маски 2, третий вход третьего ключа 10 соединен с выходом генератора Ь линейно изменяющегося напряжения выход второго ключа 8 соединен с входом первого интегрирующего усилителя 9, а выход третьего ключа 10 соединен с входом второго интегрирующего усилителя 11.
Устройство работает следующим образом.
Оптическое излучение после прохождения через приемную оптическую систему 1 фокусируется вблизи маски 2, ;после чего попадает на матричньй фотоприемник 4. Маска 2 приводится в возвратно-поступательное движение механическим приводом 3. Неханичес.-uvwi-ij и ЛиГОр
фокусируется излучение от-данного участка волнового фронта. При движ нии маски 2 вначале перекрьшается
30
35
40
45
50
55
точках фокальной плоскости, коорди ты которых.по оси X минимальны, в к це первой половины рабочего хода ма ка 2 перекрывает путь излучению, сф кусированному в точках фокальной плоскости, координаты которых по ос X максимальны. Во второй половине рабочего хода маска 2 вначале перекрывает путь излучению, сфокусированному в точках фокальной плоскост координаты которых по оси У минимал ны, а в конце второй половины цикла перекрывает путь излучению, сфокусированному на фокальной плоскости в точках с максимальными координата ми по оси У. На фиг,2 сплошной стре кой показано напранлеиие рабочего хода маски 2, прерывистой стрелкой - направление обратного хода. Таким образом, во время первой половины цикла производится определение X - координат положения сфокусированных точек всех субапертур, а во время второй половины цикла производится определение У - координат положения сфокусированных точек всех субапертур.
При начале двмения маски 2 сигна лом индикации начала рабочего хода (с выхода 1 механического привода 3) запускается генератор 5 линейно изме няющегося напряжения. Выходной сигна каадого элемента матричного фотоприемника -4 поступает нл первьй вход
5
10
, 5
20
кий привод 3 допол П1тельно формирует с помощью концевых контакторов следующие сигналы индикации: нача1га рабочего хода; первой половины рабочего хода; второй половины рабочего хода и конца рабочего хода механического привода 3 (эти выходы механического привода 3 обозначены на фиг,1 цифрами 1,2,3.,4 соответственно). Оптическое излучение от неискаженных участков волнового фронта фокусируется на оптической оси, а излучение от искаженных участков волнового фронта фокусируется в различных точках на фокальной плоскости вблизи оптической оси, причем, чем больше угол между .оптической осью- и волновым вектором некоторого участка волнового фронта, тем больше расстояние меаду оптической осью и точкой, в которую
перекрывается ,.. в
.-uvwi-ij и ЛиГОр
фокусируется излучение от-данного участка волнового фронта. При движении маски 2 вначале перекрьшается
перекрывается - ,.. в
- 30
35
40
45
0
5
точках фокальной плоскости, координаты которых.по оси X минимальны, в конце первой половины рабочего хода маска 2 перекрывает путь излучению, сфокусированному в точках фокальной плоскости, координаты которых по оси X максимальны. Во второй половине рабочего хода маска 2 вначале перекрывает путь излучению, сфокусированному в точках фокальной плоскости координаты которых по оси У минимальны, а в конце второй половины цикла перекрывает путь излучению, сфокусированному на фокальной плоскости в точках с максимальными координатами по оси У. На фиг,2 сплошной стрелкой показано напранлеиие рабочего хода маски 2, прерывистой стрелкой - направление обратного хода. Таким образом, во время первой половины цикла производится определение X - координат положения сфокусированных точек всех субапертур, а во время второй половины цикла производится определение У - координат положения сфокусированных точек всех субапертур.
При начале двмения маски 2 сигналом индикации начала рабочего хода (с выхода 1 механического привода 3) запускается генератор 5 линейно изменяющегося напряжения. Выходной сигнал каадого элемента матричного фотоприемника -4 поступает нл первьй вход
5
периог о ключа 6 ссютиетствутощег о да гюму элементу каи.ч.пл формиропаиня входных сигналов. На второй BXO/I пер пог о ключа 6 поступает си1 нал индикаций конца рабочего хода (с выхода 4 механического привода 3) для сброса ключа при.обратном ходе маски-2. При открытом первом ключе 6 при рабочем ходе маски 2 напряжение поступает на вход ждущего мультивибратора 7, который при отрицательном перепаде напряжения на его входе вырабатывает KopoTKHif одиночньпЧ импульс. При одновременном наличии на первом входе второго ключа 8 сигнала с выхода ждущего мультивибратора 7 и на второ входе второго клгоча 8 сиг)1ала индикации первой половины рабочего хода маски 2 (с выхода 2 механического привода 3) второй ключ 8 открывается и пропускает сигнал с выхода генератора 5 линейно изменяющегося напряжения на вход первого интегрир тощего .усилителя 9. Так как .сигнал на вход первого интегрирующего усилителя 9 поступает во время первой половины рабочего хода маски 2, сигнал на выходе его однозначно связан с координатой X положения сфокусированного пятна 12 данной субапертуры на фокальной плоскости приемной оптической системы 1 - чем больше координата X сфокусированного пятна 12 в данной - субапертуре тем позже осуществляется перекрытие сфокусированного пятна 12 маской 2, тем больше величина- сигнала, попавшего с выхода генератора 5 линейно изменяющегося напряжения на вход первого интегрирующего усилителя 9 (длительность сигнала на входе первого интегрирующего усилителя 9 определяется параметрами ждущего мультивибратора 7 и одинакова во всех каналах формирования выходных сигналов), тем больше сигнал на выходе первого интегрирующего усилителя 9. При од{1овременпом наличии на первом входе третьего ключа 10 сигнала с выхода ждущего мультивибратора 7 и на втором входе третьего ключа 10 сигнала индикации второй половины рабочего хода маски 2 (с выхода 3 механического привода 3) третий ключ 10 открывается и пропускает сигнал с выхода генератора 5 линейно изменяющегося напряжения на вход второго интегрирующего уси штеля 1 1 . Так как сигнал на вход второго интегриру
м
1589U70
0
5
ющего усшштеля 1 1 поступает во время второй половины рабочего хода маски 2, сигнал на выходе второго интегрирующего усилителя 11 однозначно связан с координатой У положения сфокусированного пятна данной субаперту-- ры на фокальной плоскости приемной оптической системы 1 - чем больше координата У сфокусированного пятна в данной субапертуре, тем позже осуществляется перекрытие сфокусированного пятна маской 2, тем больше величина сигнала, попавшенго с выхода генератора 5 линейно изменяющегося напряжения на вход второго интегри- р,1ощего усилителя 1 1 (длительность сигнала на входе второго интегрирующего усилителя 11 определяется параметрами ждущего мультивибратора 7 и одинакова во всех кана.пах формирования выходных сигналов), тем больше сигнал на выходе второго интегрирующего усилителя 11.
25
Формула
изобретения
30
40
Датчик, волнового фронта, содержа- щий последовательно расположенные на одной оптической оси приемнуто оптическую систему, маску, снабженнную механическим приводом перемещения, и матричный фотоприемник, а также каналы формирования -выходных сигналов, кажд.ый из которых соединен с соответствующим элементом матричного фотоприемника, отличающийся тем, что, с целью повьшения надежности путем упрощения оптической схемы, в него дополнительно введен генератор линейно изменяющегося напряжения, каждьш канал формирования вы- ходных сигналов содержит три электронных клоча, два интегрирующих уси- лителя и жд тгш 1 мультивибратор, подвижная маска выполнена в виде двух жестко соединенных ножей Фуко, рабочие кромки которых перпендикулярны одна другой и паралллельны коорди- Q натным осям матричного фотоприемника при этом лервьй и второй входы гене- . ратора соединены соответственно с первым и четвертьгм выходами привода маски, каждый элемент матричного фотоприемника соединен с первым входом первого ключа соответствующего канала формирования выходных сигналов, второй вход каждого первого ключа соединен с четвертым выходом привода.
5
второй и третий выходы которого соединены соответственно с вторыми входами второго ц третьего ключей кэ:яс- дого канала формирования выходных: .сигналов, в каждом канале выход первого ключа соединен с мультивибратором, которого соединен с первыми входами: второго и третьего
ключей, выходы которых соединены соответственно с первым и вторым усилителями, третьи входы второго и третьего ключей соединены между со-. бой и с выходом генератора, а выходами каналов формирования выходных, сигналов являются выходы интегрирующих усилителей.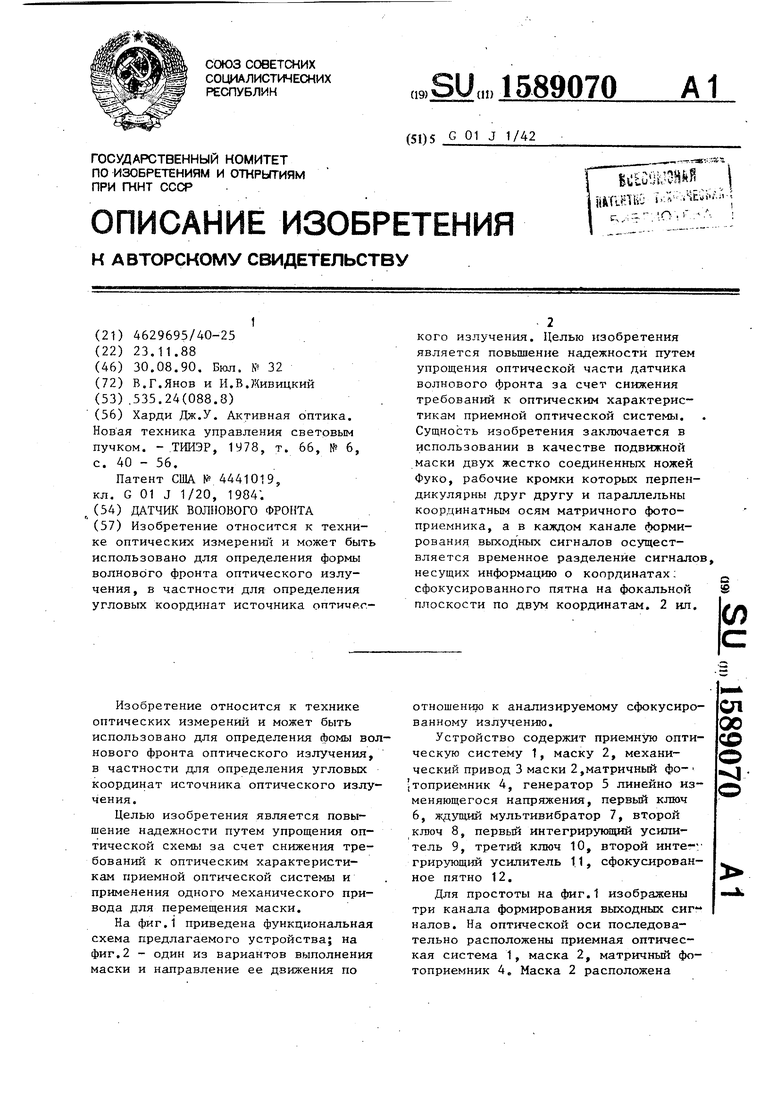
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2257136C2 |
| Датчик волнового фронта | 1988 |
|
SU1647496A1 |
| АДАПТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА ФОКУСИРОВКИ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ НА ПРОТЯЖЕННОМ ОБЪЕКТЕ | 1991 |
|
RU2020521C1 |
| Способ амплитудного, фазового и поляризационного контроля в фазированной решетке волоконных усилителей и управления распределенным состоянием интенсивности, волнового фронта и поляризации синтезированного пучка в дальнем оптическом поле и устройство его реализации | 2023 |
|
RU2804262C1 |
| Способ и устройство для измерения поперечной составляющей скорости ветра и турбулентности атмосферы на основе датчика Шэка-Гартмана | 2024 |
|
RU2835780C1 |
| ОПТИЧЕСКИЙ ПЕЛЕНГАТОР | 2003 |
|
RU2231080C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО ПУЧКА С ПРОИЗВОЛЬНО ЗАДАННЫМ РАСПРЕДЕЛЕНИЕМ ИНТЕНСИВНОСТИ В ДАЛЬНЕМ ОПТИЧЕСКОМ ПОЛЕ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2716887C1 |
| УСТРОЙСТВО ФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2289153C1 |
| Дозиметр ультрафиолетового излучения | 1986 |
|
SU1374061A1 |
Изобретение относится к технике оптических измерений и может быть использовано для определения формы волнового фронта оптического излучения, в частности для определения угловых координат источника оптического излучения. Целью изобретения является повышение надежности путем упрощения оптической части датчика волнового фронта за счет снижения требований к оптическим характеристикам приемной оптической системы. Сущность изобретения заключается в использовании в качестве подвижной маски двух жестко соединенных ножей Фуко, рабочие кромки которых перпендикулярны друг другу и параллельны координатным осям матричного фотоприемника, а в каждом канале формирования выходных сигналов осуществляется временное разделение сигналов, несущих информацию о координатах сфокусированного пятна на фокальной плоскости по двум координатам. 2 ил.
Фиг. Z
| Харди Дж.У | |||
| Активная оптика | |||
| Новая техника управления световым пучком | |||
| - ТИИЭР, 1978, т | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Патент США N 4441019, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
