Изобретение относится к техничес- кой физике и может быть использовано для определения размеров частиц и распределения их по размерам как в лабораторных, так и в производственных условиях.
Целью изобретения является повышение точности измерений.
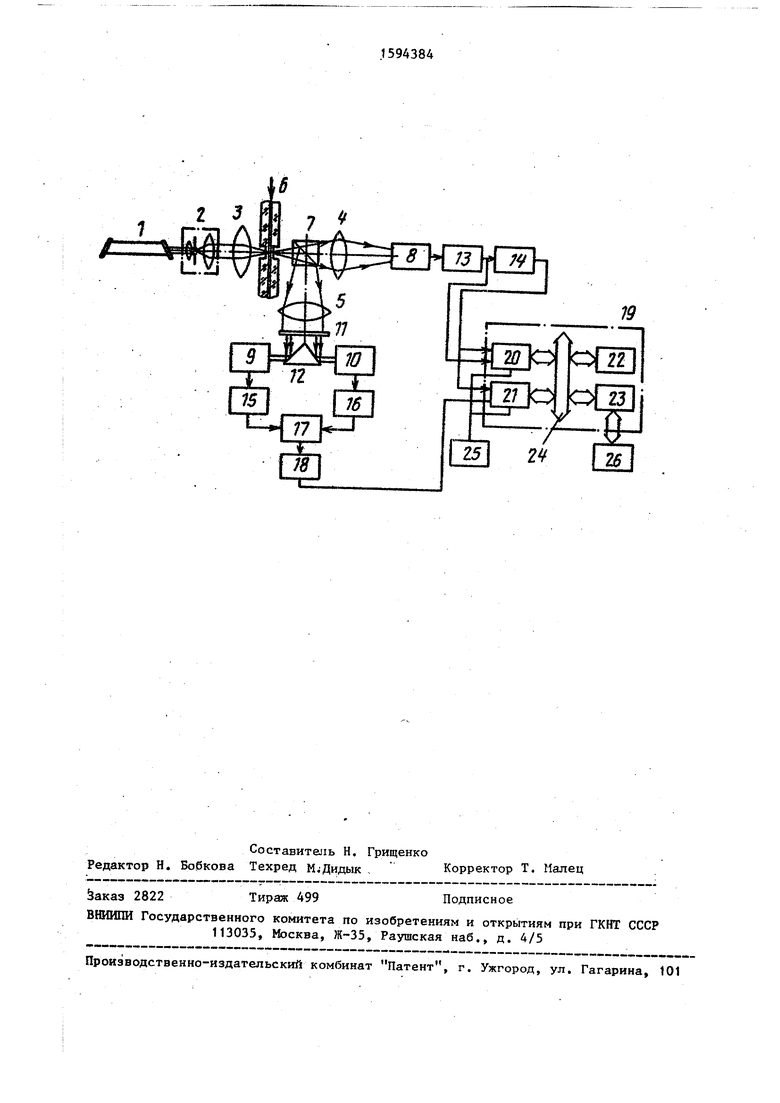
На чертеже изображена блок-схема устройства для реализации предлагаемого способа:.
Устройство содержит лазер 1, коллиматор 2, объективы 3-5, капилляр 6 для прокачки исследуемой среды, светоделитель 7, фотоприемники 8-10, двухщелевую диафрагму 11, прямоугольную призму 12, усилитель 13, пороговые устройства 14-16, измеритель 17 временного несовпадения, времяампли- .тудный преобразователь 18, вычисли- тель 19 на базе микроЭВМ, который состоит из двух модулей 20 и 21 аналогового ввода информации, процессора -22, устройства 23 последовательного обмена и системного канала 24 мик- роЭВМ, генератор 25 и дисплей 26.
Способ реализуется следующим образом.
Б исследуемой среде, проходящей с постоянной скоростью через капилляр 6, формируют измерительную зону.
:л
00 4
размеры которой превосходят максимальный размер чаетнц. Зону формир у- ют путем фокусировки объективом 3 светового потока от лазс-фа 1, расширенного коллиматором 2. Зона имеет параллельные о.граничиваюрдае поверхности. Световой поток за капилляром 6 делится светодапи телем 7 на два потока, собираемые объективами 4 и 5 Осуществляют фотозлектрьшескую ре- Гистрацик) фотоприемником 8 импульсных сигналов, возника101Щ1х всшедствие ослабления светового потока при пересечении частицами зоны измерения. При помощи объектива 5, дв осщелевой диафрагмы 11э прямоугольной призмы 125 фотоприемников 9 и Ю, пороговых устройств 15 и 16, измеритешя 17 временного несовпадения опред гляют расстояние от траектории движения каждой в отдельности частицы до центра измерительной зоны-v. Расстояние находят путем измерения временного несовпадения импульсов, получаемых при регистрации световых сигналов ослабления, формирующихся при прохождении частицей двух симметричных относительно оптической оси участков измерительной зоны, расположенных на траектории ее движения, В -устройстве фокальные плоскости объективов 3 и 5 совпадают. Сигналы ослабления от двух участков. измерите,пьной зоны выделяют при помощи двухщелевой диафрагмы .11 .. Сигналы ослабления преобразо- в ываются в электрические импульсы фотоприемниками 9 и 10. При совпадении траектории движения частщы с центром измерительной зоны импульсы с фотоприемнйков формируются одновременно, В случае прохождения частицей участка измерительной зоны вне ее центра импульсы имеют временное несовпадение, величина которого пропорциональна расстоянию от траектории движения частицы до центра зоны, Сиг- налы с фотоприемников поступают в пороговые устройства 15 и 16, На вьпсо- дах которых формируются прямоугольные импульсы. ронты импульсов с двух пороговых устройств имеют временное несовп-адение. По этим фронтам измеритель 17 временного несовпадения фЪрмирует прямоугольные импульсы, длительности которых равны временно- му несовпадению между траекторией движения частиц и центром измерительной зоны. Длительности импульсов
связаны с указанньм расстоянием следующим соотношением:
f
: t.v
где
/я - i,
z 1 длительность импульсов; расстояние-от центра измерительной зоны до траектории движения частиц; расстояние меладу щелями диафрагмы 11,fj - фокуснЪе расстоя-ние объектива 5;
V - скорость движения частиц в капилляре.
0
0
5
0
5
u
5
Прямоугольные импульсы с измерителя 17 поступают во времяамплитудньй преобразователь 18, амплитуда сигналов на выходе которого пропорциональна расстоянию между траекторией движения частиц и центром измерительной зоны. Эти сигналы поступают в модуль 21 аналогового ввода вычислителя 19. В модуль 20 аналогового ввода подаются усиленные в усилителе 13 сигналы ос- |лабления. Сигналы ослабления поступа- 1ют также в пороговое устройство 14, уровень срабатывания которого больше уровня шумов. Пороговое устройство формирует импульсы, которые служат для управления работой модулей 20 и 21 анапо го в о го ввод а. Модул и аналого- вого ввода преобразовывают амплитуды входных сигналов в коды, которые через системный канал 24 передаются в процессор 22, Причем информация пе- редает.ся в процессор только при наличии управляющих импульсов с порогового устройства 14. Аналого-цифровое преобразование в модулях аналогового ввода стробируется импульсами с генератора 25. В вычислителе увеличивают амплитуду каждого зарегистрированного и измеряемого сигнала ослабления в зависимости от расстояния между траекторией движения частицы и центром измерительной зоны, причем эта зависимость обратно пропорпио- нальна функции распределения интенсивности светового потока в направлении его распространения. Действительно, амплитуда сигнала ослабления U, пропорциональна квадрату радиуса частицы г и интенсивности I;освещающего светового потока в точке регистрации частиц:
и, с 1,г2,
где с - коэффициент пропорциональности.
Поскольку амплитуда измеряемых сигналов не должна зависеть от место- положения частицы, а должна быть связана только с ее размером, то амплитуды сигналов от частих одного размера, проходящих через центр измерительной зоны и вне его, должны быть одинаковы:
Кс1;Г2
J
где
1о интенсивность светового потока в центре измерительной зоны;
К - коэффициент усиления сигнала от частиц, проходящих вне центра измерительной зоны.
Известно, что распределение интенсивности вдоль оси сфокусированного потока описывается вьфажением
/ V
Г . / ffafz V
. I;if2 /
де Л - длина волны используемого излучения ;
Z - рассгояние до центра измерительной зоны.; а - радиус ограничивающего поток
отверстия;
f - фокусное расстояние объектива. Следовательно, коэфйициент усилеия сигналов равен
2:7 / 5Га2712
Тг-Г / /
sin
2Af2
Таким образом, закон изменения измеряемых сигналов представляет собой обратную величину функции распределения интенсивности светового потока в направлении его распространения. После выполнения этой операции сигналы от частиц не зависят от расстояния .между траекторией движения и центром измерительной зоны.
Расстояние г поступает в вьгчисли- тель 19 в виде амплитуды с время- амплитудного преобразователя 18. С помощью вычислителя определяют также ПО увеличенным амплитудам сигналов размеры частиц. Наиболее просто размеры частиц находить по табличному методу.
Устройство предварительно калибруется по эталонным латексам. В таблицу занесены размеры частиц, соот
ветств-ующие амплитудам сигналов от них. По скорректированным амплитудам находят размеры частиц. Количество частиц в потоке среды за определен-. ный промежуток времени в различных диапазонах- (границы диапазонов задаются заранее) отображается на дисплее 26, на который информация передается через устройство 2 последовательно- го обмена.
Предлагаемьй способ имеет более высокую точность за счет исключения погрешностей измерения, связанный с влиянием неравномерности освещения частиц на разных участках измерительной зоны вдоль направления распространения освещающего излучения и, следовательно, с несоответствием амплитуд измеряемых сигналов.
Формула изобретения
25
30
Способ определения размеров частиц в потоке среды, включающий формирование зондирующим излучением в исследуемом потоке измерительной зоны, превосходящей по размерам максимальный размер частиц, фотоэлектрическую регистрацию импульсных сигналов, возникающих вследствие ослабления светового потока при пересечении частицами, зоны измерения, определение размеров частиц по амплитудам сигналов, о т 35 л и ч а ю щ и и с я тем, что, с целью повышения точности измерений, дополнительно определяют расстояние от траектории движения каждой в отдельности частицы до центра измери40 тельной зоны путем измерения временного несовпадения импульсов, форми-. руемых при прохождении частицей двух симметрично расположенных относительно оптической оси участков измери45 тельной зоны, и перед определением размеров частиц увеличивают амплитуду каждого сигнала ослабления в зависимости от этого расстояния в К раз:
Г Га2 Z / . Fa2 Z Ч 2ТР-Г
50
2/lf2
Г.
где а - радиус ограничивающего световой поток отверстия;
Z - расстояние до центра измерительной зоны;
/( - дпина волны используемого излучения;
f - фокусное расстояние объектива.
ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения размеров и концентрации частиц в непрерывно протекающих жидкостях | 1989 |
|
SU1670537A1 |
| Установка для контроля размеров элементов фотошаблонов | 1981 |
|
SU968605A1 |
| Прибор для определения размеров частиц | 1990 |
|
SU1800318A1 |
| Способ определения размеров частиц в проточной среде | 1989 |
|
SU1718041A1 |
| Фотоэлектрический счетчик дисперсных частиц | 1986 |
|
SU1420488A1 |
| Способ определения размеров частиц в жидкостях | 1985 |
|
SU1448246A1 |
| Измеритель координат элементов объектов | 1990 |
|
SU1744446A1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ РАСПЛАВА ПРИ ВЫРАЩИВАНИИ КРИСТАЛЛОВ | 2004 |
|
RU2281349C2 |
| Фотоэлектрический счетчик дисперсных частиц | 1979 |
|
SU857812A1 |
| Устройство для измерения скорости частиц полидисперсного двухфазного потока | 1984 |
|
SU1249463A1 |
Изобретение относится к технической физике и, в частности, к способам автоматизированного определения размеров частиц в технологических средах. Цель изобретения - повышение точности измерений. Амплитуду каждого зарегистрированного сигнала корректируют в зависимости от расстояния между траекторией движения частицы и центром измерительной зоны, которое определяется путем измерения временного несовпадения импульсов сигналов ослабления светового потока, полученных при прохождении частицей двух симметричных относительно оптической оси участков измерительной зоны. Перед определением размеров частиц увеличивают амплитуду сигнала ослабления в зависимости от этого расстояния в K раз: K=[(φА 2Z/2λF 2)/SIN (φА 2Z/2λF 2)] 2, где A - радиус ограничивающего световой поток отверстия
Z - расстояние до центра измерительной зоны
λ - длина волны используемого излучения
F - фокусное расстояние объектива. При Z=0 амплитуда не корректируется. 1 ил.
| Беляев С.П | |||
| и др | |||
| Оптикоэлект- роиные методы изучения аэрозолей.-М.: Энергоиздат, 1981, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Способ определения распределения частиц двухфазного потока по размерам | 1982 |
|
SU1173263A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
