,
---Г
bsfs. Lffp,
feEJ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углового положения с электромагнитной редукцией | 1981 |
|
SU954810A1 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2072611C1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2393614C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416858C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437198C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416859C1 |
Изобретение относится к измерительной технике, может быть использовано для измерения угловых положений роторов электрических машин. Целью изобретения является упрощение технологии изготовления индуктивного датчика с двоичным коэффициентом электромагнитной редукции. Датчик содержит зубчатые статор и ротор с числами зубцов 30 и 32 на их повторяющихся частях соответственно. На зубцах статора размещены катушки 4-фазных обмоток, подключенных своими средними точками к выходным клеммам датчика. Концы фазных обмоток подключены к источнику 5 питания. Полуобмотки фазных катушек включают группы 6 катушек, соединенные последовательно-согласно и содержащие по 2 или по 3 катушки. Катушки в группах включены последовательно-встречно. Первая половина фазной обмотки начинается с группы, содержащей 3 катушки, а вторая - с группы, содержащей 2 катушки. При повороте ротора относительно статора 1 изменяется распределение магнитных сопротивлений между зубцами ротора и статора, вследствие чего на выходе датчика формируется трехфазная система ЭДС. 1 ил.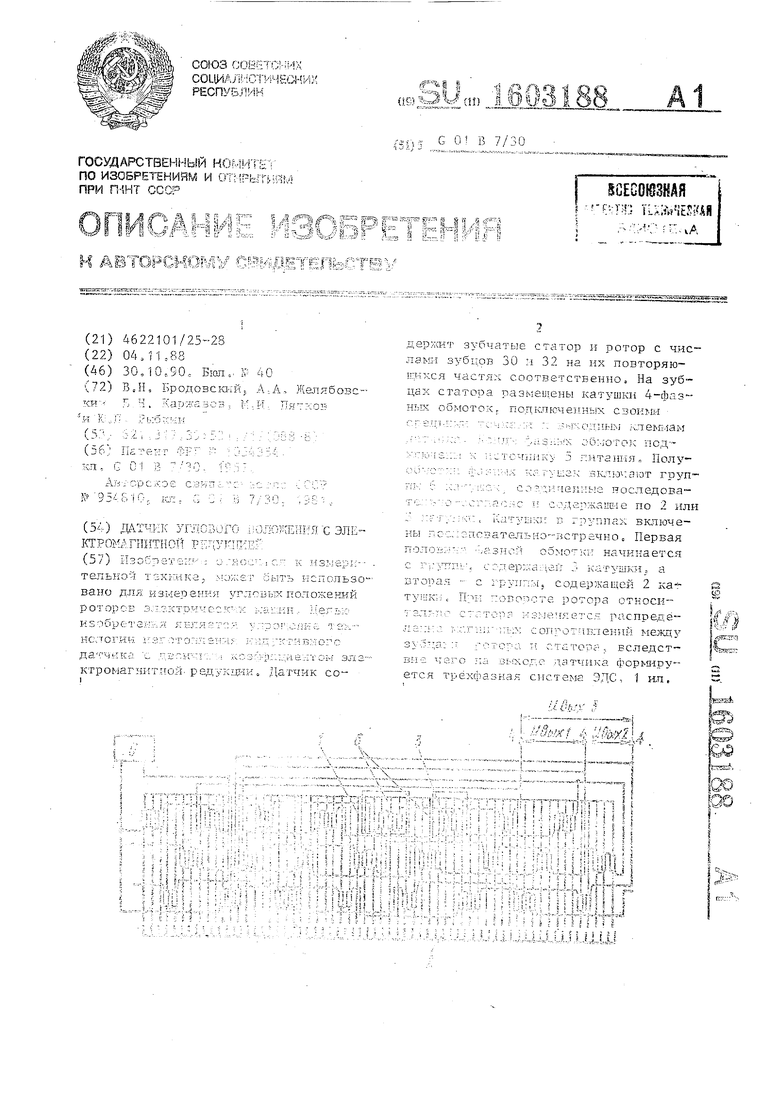
Л Г
Изобретение относится кизмеритель
ной технике и может быть использован для измерения углового положения роторов электрических машин.
Цель изобретения - упрощение технологии изготовления датчиков углового положения с двоичным коэффициентом электромагнитной редукции за сче исключения необходимости изготовления катушек с различным числом вит-- ков и размещения на одном зубце статра не более одной катушки-.
На чертеже представл ена принципиальная схема датчика углового положе ния с электромагнитной редукцией.
Датчик содержит зубчатые статор 1 и ротор 2, выполненные с различными числами зубцов - соответственно 30 и 32 - на их регуляторно повторя- ющихся частях. На статоре 1 размещена трехфазная обмотка, выполненная в виде одинаковых катушек 3, каждая из которых надета на один из соответствующих зубцов статора 1. Каждая из фазных обмоток средней точкой подключена к одной из соответствующих выходных клемм 4 датчика, а концами- к источнику 5 питания. Половины фазных обмоток - от начала до средней точки и от -средней точки до конца - выполнены из последовательно-согласно соединенных групп 6, образованных расположенными на соседних зубцах статора последовательно-встречно включенными катушками 3, причем;число катушек, равное 2 и 3, в группах чередуется. Первые половины фазных обмоток начинаются с группы из 3 кат тушек, а вторые половины - с группы из 2 катушек, причем группы первой половины фазной обмотки находятся между группами второй половины. На чертеже группы разных фазных обмоток для наглядности размещены на разных уровнях, а начала всех катушек изоб ражены снизу.
Начала фазных обмоток образованы начальными зажимами групп с числом катушек, равным 3, расположенных в первой половине повторяющейся части статора, а концы фазных обмотрк образованы концевыми зажимами ближайши предшествующих им групп катушек.
Датчик работает следующим образом
При повороте ротора 2 его зубцы перемещаются относительно зубцов статора 1, что.приводит к изменению распределения магнитных проводимосте
0
0
j
Q 5
5
0
5
0
5
в зазорах между зубцами, к изменению индуктивноетей фазных полуобмоток и к изменению выходного напряжения. Амплитуда переменной составляющей выходного напряжения на выводах каждой фазной обмотки постоянна, что услов- лено тем, что на повторяющихся частях датчика количество катушек в каждой половине фазных обмоток одинаково, а характер изменения сопротивления магнитной цепи идентичен. Благодаря тому, что катушки различных фазных обмоток имеют пространственный сдвиг и распределены по зубцам статора на 1/3 зубцового шага ротора, выходное напряжение датчика образует трехфазную систему ЭДС.
Использование в датчике катушек с одинаковым числом витков и размещение на зубцах статора по одной катушке упрощают технологию изгсУтовле- ния датчиков углового положения с двоичным коэффициентом электромагнитной редукции.
Формула изобретения I
Датчик углового положения с электромагнитной редукцией, содержащий зубчатые статор и ротор, выполненные с различным числом зубцов на их регулярно повторяющихся частях, и размещённую на статоре трехфазную обмотку, каждая из катушек которой надета на соответствующий зубец статора, средняя точка каждой фазной обмотки подключена к соответствующей выходной клемме датчика, а концы предназначены для подключения к источнику питания, каждая половина фазной обмотки состоит из последовательно-согласно соединенных групп катушек, чередующихся с группами второй ее половины, эти группы образованы расположенными на соседних зубцах и последовательно- встречно включенными катушками и равномерно распределены по периферии статора с повторя1(ицимся порядком чередования фаз, отличающийся тем, что, с целью упрощения технологии изготовления датчика с двоичным коэффициентом электромагнитной редукции, число зубцов на повторяющихся частях статора и ротора равно соответственно 30 и 32j число катушек в группах регулярно чередуется и равно соответственно 2 или 3, при этом группы на первой
5 1603188 .6половине повторяющейся части начина-ток образованы начальными зажимами
ются с группы в 3 катушки, на второйгрупп с числом катушек 3, располополовине - с группы в 2 катушки, на-женных в первой половине повторяющейчальные н концевые зажимы соседнихся части статора, а концы фазных обгрупп, включенных в различные фаз- моток образованы концевыми зажимами
ные обмотки, образованы одноименнымиближайших предшествующих им групп
зажимами катушек, начала фазных обмо-катушек.