Фиг.1
пают на сравнивающее устройство 36, а далее сигнал рассогласования с последнего через устройство управления 38 поступает на суммирующее устройство 39, где суммируется с сигналом задающего устройства 10. Если при этом уровень на входе перфорированного трубопровода изменяется, то сигнал с датчика 9 поступает на сравнивающее
устройство 11, выдающее сигнал рассогласования в устройство 12 основного каскада 7. Последнее осуществляет управление приводами 14 и 15 регулирующих органов 18 и 19, открывая клапаны на входе или на выходе перфорированного трубопровода, т.е. осуществляя подачу или сброс воды из последнего. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система регулирования водного режима почвы | 1986 |
|
SU1428300A1 |
| Способ стабилизации уровня грунтовых вод | 1988 |
|
SU1548334A1 |
| СПОСОБ УПРАВЛЕНИЯ ОЧИСТКОЙ ЗАГРЯЗНЕННЫХ ПОВЕРХНОСТНЫХ И ДРЕНАЖНЫХ ВОД | 2023 |
|
RU2809066C1 |
| Устройство для регулирования уровня грунтовых вод в осушительно-увлажнительной системе | 1981 |
|
SU1024885A1 |
| Осушительно - увлажнительная система | 1987 |
|
SU1441018A1 |
| ОРОСИТЕЛЬНАЯ СИСТЕМА | 2017 |
|
RU2650230C1 |
| СПОСОБ ПОДОГРЕВА ПОЧВЫ ОТ ЭНЕРГИИ СОЛНЕЧНОЙ РАДИАЦИИ В УСЛОВИЯХ ЮГО-ЗАПАДНОЙ ЧАСТИ БЕЛАРУСИ | 2024 |
|
RU2835961C1 |
| МОДУЛЬНАЯ ОСУШИТЕЛЬНО-УВЛАЖНИТЕЛЬНАЯ СИСТЕМА | 2021 |
|
RU2768007C1 |
| ЛИЗИМЕТР | 2019 |
|
RU2709475C1 |
| МЕЛИОРАТИВНАЯ СИСТЕМА | 1992 |
|
RU2057844C1 |
Изобретение относится к гидромелиорации и может быть использовано для двухстороннего регулирования уровней грунтовых вод (УГВ). Цель изобретения - повышение точности управления при значительных площадях мелиорируемого участка. Система автоматического управления (САУ) состоит из объекта управления - участка земли 1, обслуживаемого регулирующим каналом 4, выполненного в виде перфорированного трубопровода. Последний соединен с подающим 5 и сбросным 6 каналами, имеющими стабилизированную высокую и соответственно низкую отметки воды. Управление УГВ осуществляется двухкаскадным программным устройством 2. В основной каскад 7 последнего входят датчик 9 уровня в регулирующем канале 4, задающее устройство 10, сравнивающее 11, управляющее 12 и исполнительное 13 устройства. Последнее через два привода 14 и 15, имеющих люфты 16 и 17, связано с двумя регулирующими органами 18 и 19 запорных клапанов, установленных на входе и выходе перфорированного трубопровода 4. В дополнительный каскад 8 входят датчик УГВ 30, задающее устройство 35, сравнивающее 36 и управляющее 38 устройства. При этом выход дополнительного каскада через суммирующее устройство 39 включен между задающим 10 и сравнивающим 11 устройствами основного каскада 7, причем сравнивающие, управляющие и исполнительное устройства обоих каскадов выполнены устройствами двухстороннего действия. При отклонении, например, в случае дождя УГВ от заданного сигналы с датчика УГВ поступают на сравнивающее устройство 36, а далее сигнал рассогласования с последнего через устройство управления 38 поступает на суммирующее устройство 39, где суммируется с сигналом задающего устройства 10. Если при этом уровень на входе перфорированного трубопровода изменяется, то сигнал с датчика 9 поступает на сравнивающее устройство 11, выдающее сигнал рассогласования в устройство 12 основного каскада 7. Последнее осуществляет управление приводами 14 и 15 регулирующих органов 18 и 19, открывая клапаны на входе или на выходе перфорированного трубопровода, т.е. осуществляя подачу или сброс воды из последнего. 4 ил.
Изобретение относится к гидромелиорации и может быть использовано для двух- стороннёго регулирования уровней грунтовых вод (УГВ).
Целью изобретения является повыше- ние точности управления при значительных площадях мелиорируемого участка.
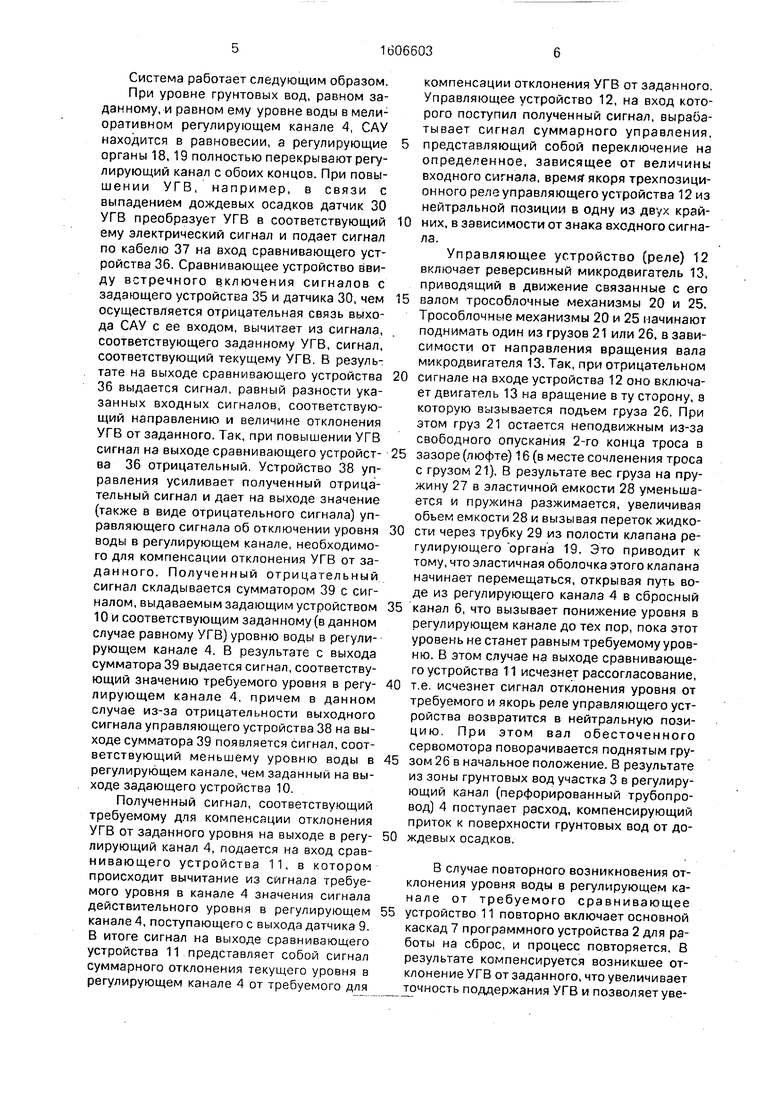
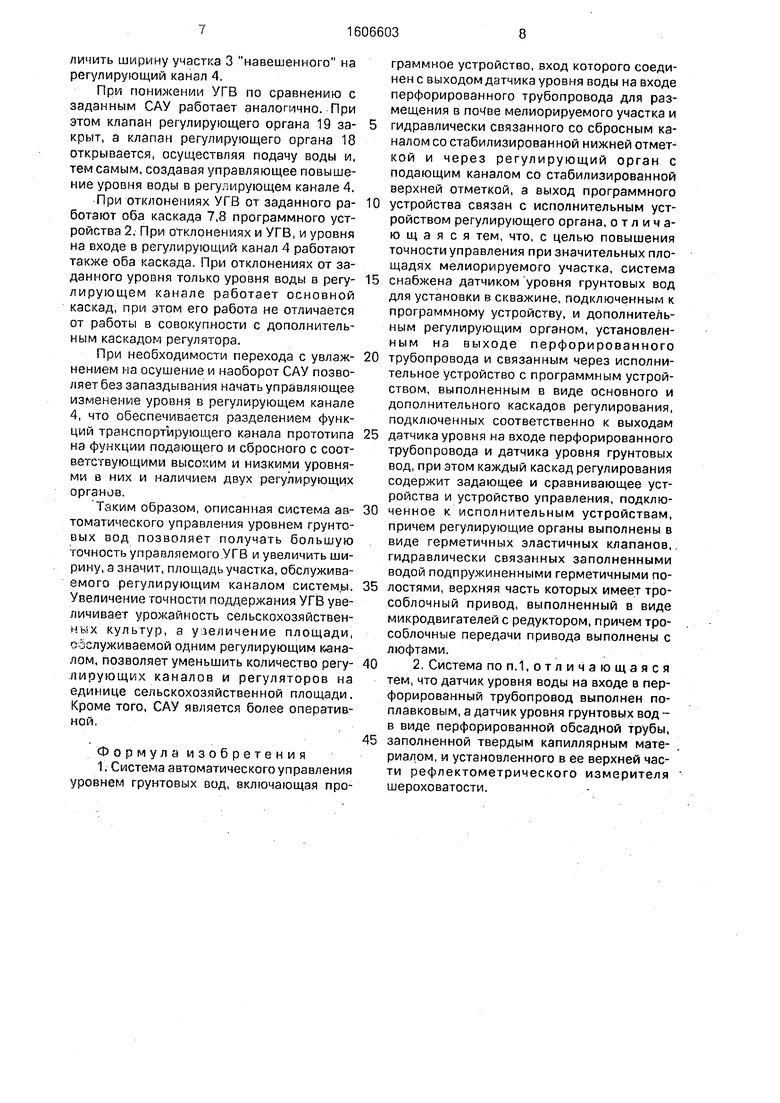
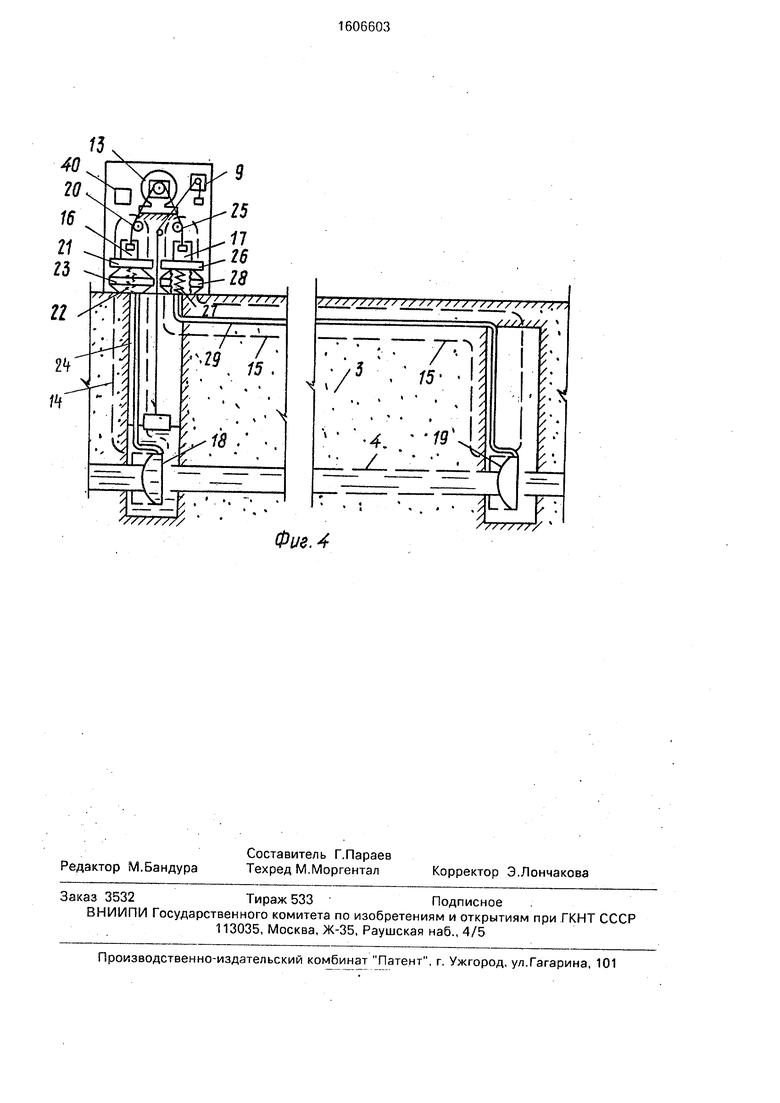
На фиг.1 представлена блочная схема системы автоматического управления УГВ; на фиг.2 - схематический разрез мелиори- руёмого участка; на фиг.З - расположение основных элементов системы в плане; на фиг.4 - схема привода регулирующих орга- нов системы.
Система автоматического управления (САУ) уровнем грунтовых вод состоит из объекта управления (мелиорируемого участка) 1 и программного устройства 2. Объектуправ- .ления представляет Собой участок земли 3, навешенный на закрытый регулирующий канал, выполненный в виде перфорированного трубопровода 4. Последний соединен одним концом с подающим каналом 5, имеющим стабилизированную высокую отметку поверхности воды, а другим - со сбросовым каналом 6, имеющим стабилизированную низкую отметку поверхности воды. Программное устройство 2 соЬтоит из двух каскадов регулирования: основного 7и дополнительного 8.
В ОСНОВНОЙ каскад 7 входят следующие звенья: датчик 9 уровней воды на входе в регулирующем мелиоративном канале (перфорированном трубопроводе) 4 поплавкового типа с электрическим выходом, а также задающее (уровень воды в регулирующем канале) устройство 10 с электрическим выходом и сравнивающее устройство 11 в виде электронного компаратора. Кроме того, основной каскад 7 содержит устройство 12 управления, выполненное в виде трехпози- ционного поляризованного реле, и исполнительное устройство 13, в качестве которого используется реверсивный маломощный электродвигатель с понижающим обороты редуктором. Два параллельных привода 14 и 15 основного к ркада 7 выполнены с люф
тами 16, 17 и относятся соответственно к подающему 18 и сбросному 19 регулирующим органам. При этом привод 14 снабжен трособлочным механизмом 20, связанным с грузом 21, пригруженной грузом 21 пружиной 22, заполненной водой эластичной емкостью 23, внутри которой установлена пружина 22, и заполненной водой трубкой 24. Люфт 16 в приводе осуществлен за счет зазора в сочленении троса трособлочного механизма 20 с грузом 21, так что при отсутствии сигнала управления люфт полностью выбран. Привод 15 устроен таким же образом, как и привод 14, и содержит аналогично ему трособлочный механизм 25, груз 26, пружину 27, эластичную емкость 28 и трубку 29. Каждый из регулирующих органов 18,19 представляет собой пустотелый заполненный водой эластичный клапан, который при. отсутствии сигнала управления перекрывает путь воде.
В дополнительный каскад 8 входят следующие звенья: датчик 30 УГВ, выполненный в виде перфорированной обсадной трубы 31, заполненной твердым капиллярным материалом 32 и установленной в сква- жине 33, и рефлектометрического измерителя 34 шероховатости, установленного над верхним концом трубы i выдающего на выходе электрический сигнал, задающее УГВ устройство 35 с электрическим выходом и сравнивающее устройство 36, выполненное в виде электронного ком- паратора. При этом датчик 30 соединен с компаратором 36 кабелем 37. Устройство 38 управления выполнено в виде пропорционального операционного усилителя, коэффициент усиления которого определяется известными методами теории автоматического управления. Основной каскад 7 и дополнительный каскад 8 программного устройства соединены.между собой через электронное суммирующее устройство 39. Питание системы автоматического управления (САУ) осуществляется от блока 40 питания.
Система работает следующим образом. При уровне грунтовых вод, равном заданному, и равном ему уровне воды в мелиоративном регулирующем канале 4, САУ находится в равновесии, а регулирующие органы 18,19 полностью перекрывают регулирующий канал с обоих концов. При повышении УГВ, например, в связи с выпадением дождевых осадков датчик 30 УГВ преобразует УГВ в соответствующий ему электрический сигнал и подает сигнал по кабелю 37 на вход сравнивающего устройства 36. Сравнивающее устройство ввиду встречного включения сигналов с задающего устройства 35 и датчика 30, чем осуществляется отрицательная связь выхода САУ с ее входом, вычитает из сигнала, соответствующего заданному УГВ, сигнал, соответствующий текущему УГВ. В результате на выходе сравнивающего устройства 36 выдается сигнал, равный разности указанных входных сигналов, соответствующий направлению и величине отклонения УГВ от заданного. Так, при повышении УГВ сигнал на выходе сравнивающего устройства 36 отрицательный. Устройство 38 управления усиливает полученный отрицательный сигнал и дает на выходе значение (также в виде отрицательного сигнала) управляющего сигнала об отключении уровня воды в регулирующем канале, необходимого для компенсации отклонения УГВ от заданного. Полученный отрицательный сигнал складывается сумматором 39 с сигналом, выдаваемым задающим устройством 10 и соответствующим заданному (в данном случае равному УГВ) уровню воды в регулирующем канале 4. В результате с выхода сумматора 39 выдается сигнал, соответствующий значению требуемого уровня в регулирующем канале 4, причем в данном случае из-за отрицательности выходного сигнала управляющего устройства 38 на выходе сумматора 39 появляется сигнал, соответствующий меньшему уровню воды в регулирующем канале, чем заданный на выходе задающего устройства 10.
Полученный сигнал, соответствующий требуемому для компенсации отклонения УГВ от заданного уровня на выходе в регулирующий канал 4, подается на вход сравнивающего устройства 11. в котором происходит вычитание из сигнала требуемого уровня в канале 4 значения сигнала действительного уровня в регулирующем канале 4, поступающего с выхода датчика 9. В итоге сигнал на выходе сравнивающего устройства 11 представляет собой сигнал суммарного отклонения текущего уровня в регулирующем канале 4 от требуемого для
компенсации отклонения УГВ от заданного. Управляющее устройство 12, на вход которого поступил полученный сигнал, вырабатывает сигнал суммарного управления, 5 представляющий собой переключение на определенное, зависящее от величины входного сигнала, времяг якоря трехпозици- онного реле управляющего устройства 12 из нейтральной позиции в одну из двух край- 10 них, в зависимости от знака входного сигнала.
Управляющее устройство (реле) 12 включает реверсивный микродвигатель 13, приводящий в движение связанные с его 15 валом трособлочные механизмы 20 и 25. Трособлочные механизмы 20 и 25 начинают поднимать один из грузов 21 или 26. в зависимости от направления вращения вала микродвигателя 13. Так, при отрицательном 20 сигнале на входе устройства 12 оно включает двигатель 13 на вращение в ту сторону, в которую вызывается подъем груза 26. При этом груз 21 остается неподвижным из-за свободного опускания 2-го конца троса в 25 зазоре (люфте) 16 (в месте сочленения троса с грузом 21). В результате вес груза на пружину 27 в эластичной емкости 28 уменьшается и пружина разжимается, увеличивая объем емкости 28 и вызывая переток жидко- 30 сти через трубку 29 из полости клапана регулирующего органа 19. Это приводит к тому, что эластичная оболочка этого клапана начинает перемещаться, открывая путь воде из регулирующего канала 4 в сбросный 35 канал 6, что вызывает понижение уровня в регулирующем канале до тех пор, пока этот уровень не станет равным требуемому уровню. В этом случае на выходе сравнивающего устройства 11 исчезнет рассогласование, 0 т.е. исчезнет сигнал отклонения уровня от требуемого и якорь реле управляющего устройства возвратится в нейтральную позицию. При этом вал обесточенного сервомотора поворачивается поднятым гру- 5 зом 26 в начальное положение. В результате из зоны грунтовых вод участка 3 в регулирующий канал (перфорированный трубопровод) 4 поступает расход, компенсирующий приток к поверхности грунтовых вод от до- 0 ждевых осадков.
В случае повторного возникновения отклонения уровня воды в регулирующем канале от требуемого сравнивающее устройство 11 повторно включает основной каскад 7 программного устройства 2 для работы на сброс, и процесс повторяется. В результате компенсируется возникшее отклонение УГВ от заданного, что увеличивает точность поддержания УГВ и позволяет уве5
личить ширину участка 3 навешенного на регулирующий канал 4.
При понижении УГВ по сравнению с заданным САУ работает аналогично. При этом клапан регулирующего органа 19 закрыт, а клапан регулирующего органа 18 открывается, осуществляя подачу воды и, тем самым, создавая управляющее повышение уровня воды в регулирующем канале 4.
При отклонениях УГВ от заданного работают оба каскада 7,8 программного устройства 2. При отклонениях и УГВ, и уровня на входе в регулирующий канал 4 работают также оба каскада. При отклонениях от заданного уровня только уровня воды в регулирующем канале работает основной каскад, при этом его работа не отличается от работы в совокупности с дополнительным каскадом регулятора.
При необходимости перехода с увлажнением на осушение и наоборот САУ позволяет без запаздывания начать управляющее изменение уровня в регулирующем канале 4, что обеспечивается разделением функций транспортирующего канала прототипа на функции подающего и сбросного с соответствующими высоким и низкими уровнями в них и наличием двух регулирующих органов.
Таким образом, описанная система автоматического управления уровнем грунтовых вод позволяет получать большую точность управляемого .УГВ и увеличить ширину, а значит, площадь участка, обслуживаемого регулирующим каналом системь. Увеличение точности поддержания УГВ увеличивает урожайность сельскохозяйственных культур, а увеличение площади, оослуживаемой одним регулирующим кйна- лом, позволяет уменьшить количество регулирующих каналов и регуляторов на единице сельскохозяйственной площади. Кроме того, САУ является более оперативной,
Формула изобретения 1. Система автоматического управления уровнем грунтовых вод, включающая программное устройство, вход которого соединен с выходом датчика уровня воды на входе перфорированного трубопровода ,для размещения в почве мелиорируемого участка и 5 гидравлически связанного со сбросным каналом со стабилизированной нижней отмет- кой и через регулирующий орган с подающим каналом со стабилизированной верхней отметкой, а выход программного
0 устройства связан с исполнительным устройством регулирующего органа, отличающаяся тем, что, с целью повышения точности управления при значительных площадях мелиорируемого участка, система
5 снабжена датчиком уровня грунтовых вод для установки в скважине, подключенным к программному устройству, и дополнительным регулирующим органом, установленным на выходе перфорированного
0 трубопровода и связанным через исполнительное устройство с программным устройством, выполненным в виде основного и дополнительного каскадов регулирования, подключенных соответственно к выходам
5 датчика уровня на входе перфорированного трубопровода и датчика уровня грунтовых вод, при этом каждый каскад регулирования содержит задающее и сравнивающее устройства и устройство управления, подклю0 ченное к исполнительным устройствам, причем регулирующие органы выполнены в виде герметичных эластичных клапанов,: гидравлически связанных заполненными водой подпружиненными герметичными по5 лостями, верхняя часть которых имеет тро- соблочный привод, выполненный в виде микродвигателей с редуктором, причем тро- соблочные передачи привода выполнены с люфтами.
0 2. Система по п.1,отличающаяся тем, что датчик уровня воды на входе в перфорированный трубопровод выполнен поплавковым, а датчик уровня грунтовых вод- в виде перфорированной обсадной трубы,
5 заполненной твердым капиллярным материалом, и установленного в ее верхней части рефлектометрического измерителя шероховатости.
/ , / / 53 -
./.- - - - v.M-y
- . . / - - -. - - /. .7(9
//g. Z
Ж
. J
//g. Z
Фие.4
| Способ мелиорации почв | 1980 |
|
SU1055820A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
