Известны магнитоэлектрические системы АРУ, в которых автоматическое регулирование уровня АРУ по контрольному току в аипар атуре уилотиеиия ироводиых линий дальней связи осуществляется с иомондью электромеханических (на воздушных линиях) и электротермических (иа кабельных линиях), систем АРУ.
В нредлагаемой магнитоэлектрической системе АРУ повышение ее к.п.д., сигиализация иреде.лов регулирования и блокировка при пропадании контрольного тока достигнуты использованием в системе сравнения в качестве эталонного сигнала веса подвижной части регулирующего устройства.
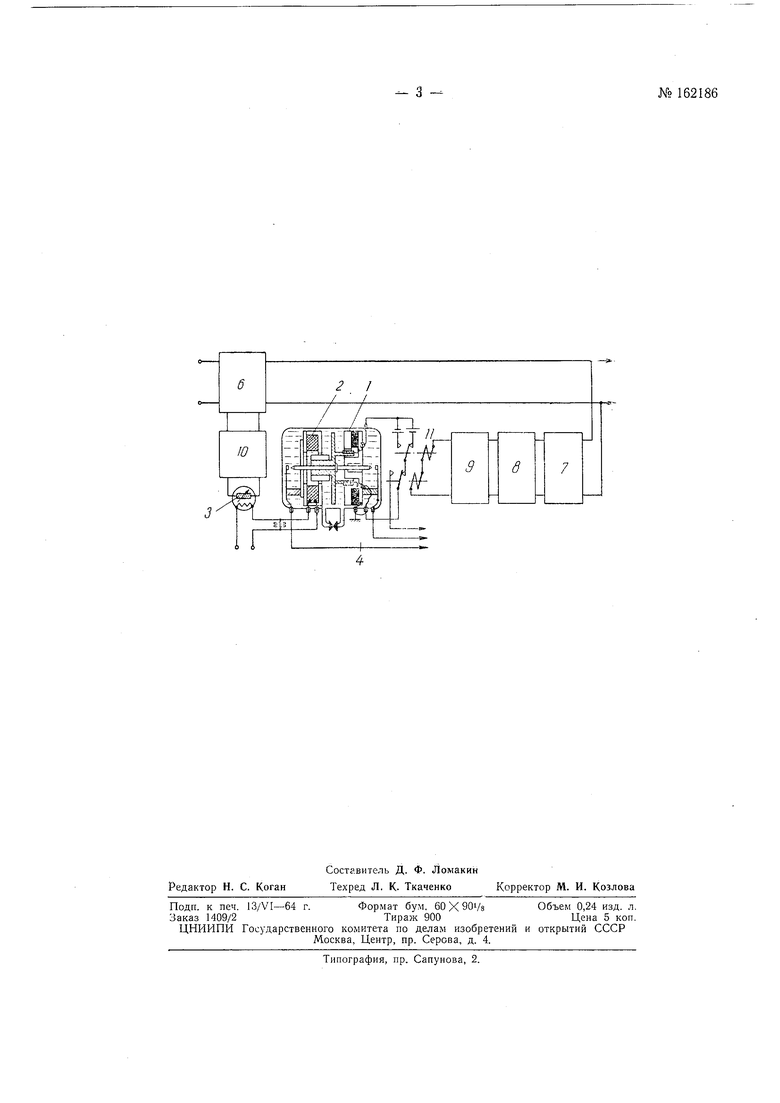
На фиг. 1 приведено схематическое изображение онисываемой системы АРУ; на фиг. 2- ее вариант.
Магнитоэлектрическая система АРУ содержит магнитоэлектрический двигатель / с жидкостиым замедлителем, использующим в качестве рабочей жидкости стойкие масла и их смеси, датчик индуктивиости 2, пключенньп в цепь подогрева регулирующего термистора 3, что позволяет получить ровиую тяговую характеристику при управлении от постояииого тока, а использоваиие вертикального
движения дает возможность резко уменьшить зоиу нечувствительности, получить сравнение Н нсиользовать вес в качестве постояиног( эквивалента заданного уровня.
Использоваиие вертикального движения и энергии постояииого магнита в двигателе, а также отсутствие потерь иа сухое трение в жидкостном замедлителе, дает возможиость повысить к.п.д. системы и осуществить его уиравлеиие от выпрямленного контрольного тока ири мощности порядка 30-40 мет. В качестве эквивалента эталонного сигнала заданного уровня в системе использован вес подвнжной части регулирующего устройства 4. В общую с магнитоэлектрнческил двигателем цеиь включеи электромагнитный фиксатор 5 с коитактами сигиализации блокировки.
Ток контрольной частоты на выходе линейного (регулируемого) усилителя 6 выделяется из спектра передаваемого сигнала с помощью узкополосного фильтра 7, усиливается резонансным усилителем 8 п выпрямляется детектором 9. Выпрямленный ток поступает 1та регулирующее устройство 4, где производится сравнение его с некоторым эталоном, являющимся эквивалентом заданного уровня, и усилен1ге мощности сигнала до величины,
достаточной для соответствующего подогрева термистора 3, включенного в цепь регулирующего контура 10 линейного усилителя 6.
Качественные ноказатели (и наименование) системы АРУ определяются регулирующим устройством 4, использованном в системе.
В другом (релейном) варианте регулирующего устройства 4 принято горизонтальное перемещение подвижной части. Ток контрольной частоты воздействует на двигатель через магнитоэлектрическое реле //. В качестве эталона используется усилие. пружины реле. Применение реле // позволяет, при более низких значениях индукции в зазоре двигателя /, получить требуемые пределы регулирования без принятия каких-либо мер по выравниванию тяговой характеристики устройства. Блокировка регулируемого устройства 4 ос ществляется путем выключения двигателя 1, что обеспечивается с помощью поляризованного реле, включенного .совместно с реле //в цепь контрольного тока. При этом под воздействием веса подвижной части создается достаточное для блокировки преобладание трения в подшиппиках над силой реакции датчика индуктивности.
Описанная магнитоэлектрическая система АРУ молсет найти применение в аппаратуре дальней связи.
Предмет изобретения
Магнитоэлектрическая система АРУ, содержащая магнитоэлектрический двигатель с жидкостным замедлителем и датчик индуктивности, включенный в цепь подогрева регулирующего термистора, отличающаяся 1ем, что, с целью повышения к.п.д. системы, cпгнaJШзaции пределов регулирования и блокировки при пропадании контрольного тока, в jieii в качестве эквивалента эталонного сигнала заданного уровня использован вес подвижной части регулирующего устройства, а в общую с двигателем цепь включен электромагнитный фиксатор с контактами сигнализации блокировки.