cELJU
jS
о
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ингаляционного воздействия на организм и аппарат для его осуществления | 2016 |
|
RU2708784C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 1998 |
|
RU2174386C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ С ИНТЕГРИРОВАННОЙ ВОЗДУХОДУВКОЙ | 2011 |
|
RU2585137C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2008 |
|
RU2357762C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2003 |
|
RU2240767C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 1994 |
|
RU2085176C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЫХАТЕЛЬНОГО ОБЪЕМА В АППАРАТАХ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2000 |
|
RU2167600C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2002 |
|
RU2246926C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2010 |
|
RU2453275C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2002 |
|
RU2219892C1 |

Изобретение обеспечивает адекватный газообмен для поддержания жизнедеятельности пациента в реанимационный период при ИВЛ за счет построения системы управления на принципе автоматического подбора величины скорости потока в зависимости от измеряемых параметров дыхания, что обеспечивается установкой в тройнике пациента первичного преобразователя 5 давления и выполнением системы 3 управления, которая снабжена последовательно соединенными измерительным преобразователем, сумматором, к второму входу которого подключены задатчик внутрилегочного давления, нечетким контроллером и формирователем сигналов управления скоростью потока. 6 ил.
т
т
Фиг.1
Изобретение относится к медицинской технике и может быть использован в анестезиологии, реанимации и интенсивной терапии при замещении временно утраченной вен гиляционной функции организма.
Цель изобретения - повышение адекватности механизма искусственной вентиляции легких.
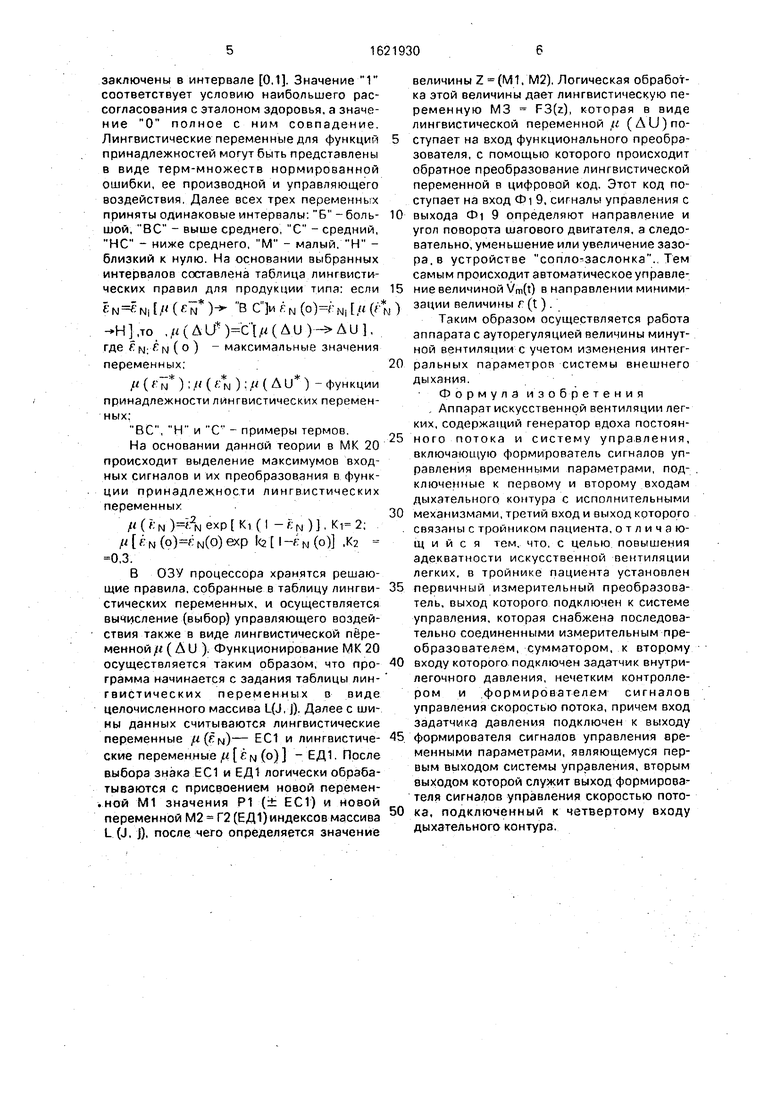
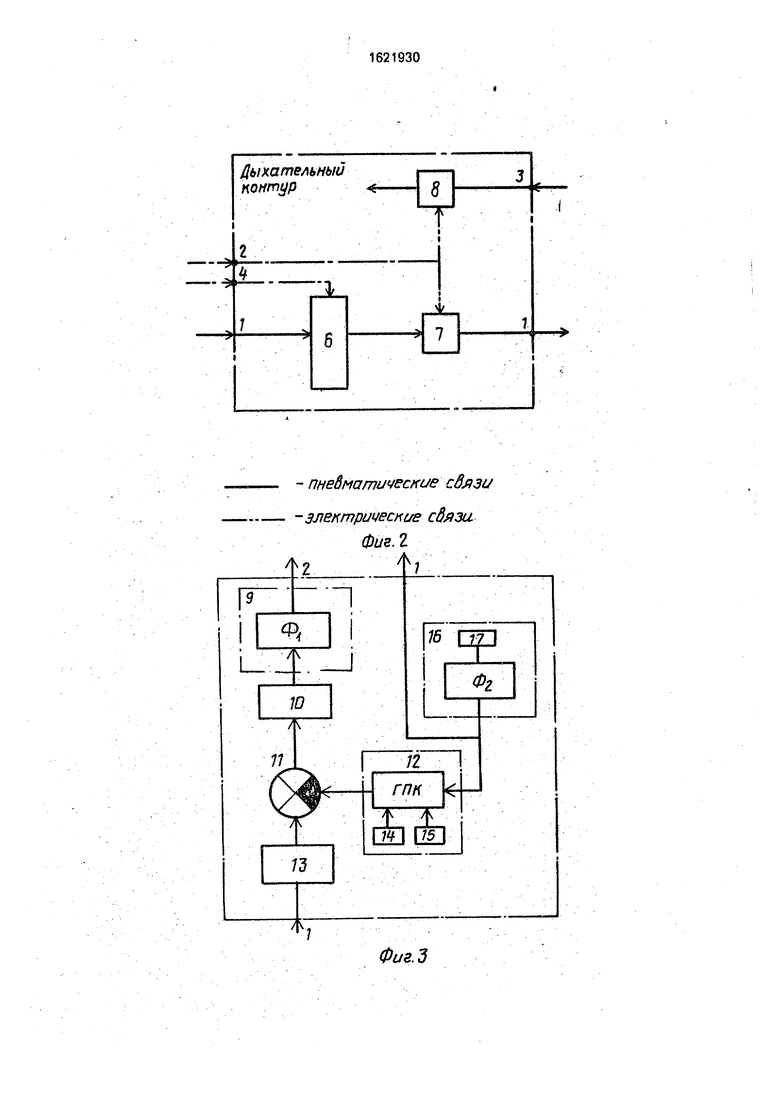
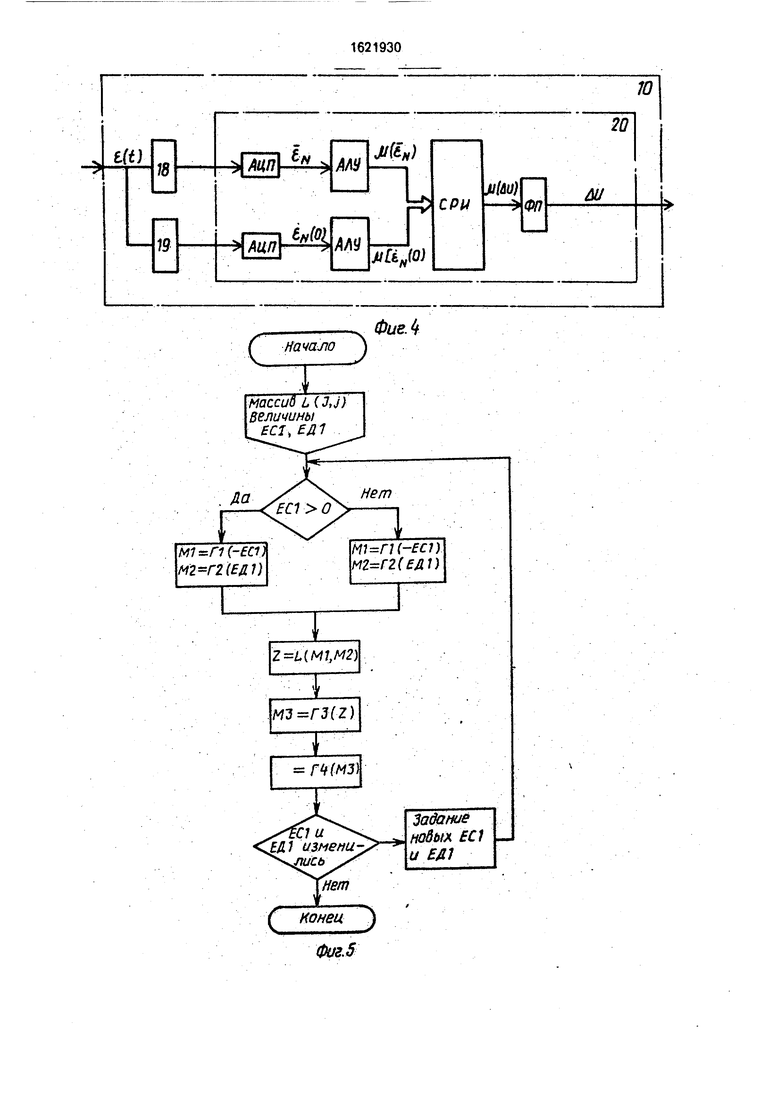
На фиг. 1 показана структурная схема а/ппарата; на фиг.2 - структурная схема ды- хательного контура; на фиг.З - структурная схема системы управления; на фиг.4- структурная схема нечетного контроллера; на фиг.5 - структурная схема алгоритма нечетного контроллера; на фиг.6 - таблица линг- вистических переменных.
Аппарат искусственной вентиляции легких содержит генератор 1 вдоха, дыхательный контур 2, систему 3 управления, тройник 4 пациента, первичный измери- тельный преобразователь (ПИП) 5, исполни- тельный механизм 6 скорости потока, электромагнитный клапан 7 вдоха, электромагнитный клапан 8 выдоха, формирователь 9, нечетный контроллер 10 скорости потока, сумматор 11, задатчик 12 внутриле- гочного давления, измерительный преобразователь (ИП) 13, переключатели 14 и 15, второй формирователь 16, задатчик 17 частоты вентиляции, интегратор 18, дифференциа- тор 19 и микропроцессорный контроллер 20.
Аппарат работает следующим образом,
После включения аппарата в электриче- скую сеть генератор 1 подает постоянный поток газа в дыхательный контур 2. На основании данных предварительного обследования или используя нормализованные данные врач с помощью переключателя 14 - сопротивление, и переключателя 15 - емкость, задатчика 12 устанавливает индивидуальное для конкретного пациента значение величины внутрилегочного давления в виде электрического сигнала опреде- ленной амплитуды и длительности, а задатчиком 17 - временные параметры ИВЛ. По сигналу с задатчика 17 формирователь 16 формирует на своем выходе сигналы управления ЭМК 7 и 8, частота следования этих сигналов и их скважность пропорциональны заданным врачом временным параметрам ИВЛ (частота вентиляции, отношение длительностей вдоха и выдоха). Сигнал с выхода задатчика 12 через сумматор 11 поступает на вход нечеткого контроллера 10, на выходе которого появляется последовательность прямоугольных импульсов, пропорциональная скорости потока, обеспечивающего заданную величину
внутрилегочного давления. Эта последовательность в См 9 формируется в цифровой „код 1 - 2 - 3 и передается на исполнительный механизм 6. В зависимости от частоты следования пропорциональных импульсов на выходе контроллера 10, а следовательно, и частоты следования кода 1 - 2 - 3 с выхода Oi 9 исполнительный механизм 6 обеспечивает заданную врачом скорость потока. Аппарат подключают к пациенту.
В процессе проведения ИВЛ истинное значение давления измеряется ПИП 5 и подается на вход ИП 13. Электрический сигнал на выходе ПИП 5, пропорциональный пневматическому сигналу давления в тройнике 4 пациента, проходя ИП 13, нормируется по амплитуде и длительности в электрический сигнал X (t). Этот сигнал поступает на вход сумматора 11, на второй вход которого поступает электический сигнал g(t). Сумматор 11 осуществляет алгебраическое суммирование этих сигналов, в результате которого на его выходе появляется сигнал ошибки Е (t). Исходя из выбранной модели объекта управления (фиг.1) можно записать
X(t)PreH(l ):
д(( -е).
где X(t) - текущее значение внутрилегочного давления;
g(t) - текущее значение заданной аппаратом величины давления;
ri - постоянная времени легких; гэ - постоянная (эквивалентная) времени аппарата и модели;
t - длительность входа; Рген - давление, создаваемое генератором потока.
По определению ошибка равна t(t) X(t)-g(t),
отсюда получают
-t -t
Р(1)Рген(е Гз еЬ .
Рген(
-t
етэ
Т1
-t
Гэ
Гэ
-)
Сигнал, пропорциональный е (t), поступает на вход нечетного контроллера 10, в Котором с помощью устройства 18 и 19 происходит соответственно интегрирование и дифференцирование сигнала ошибки. Для множества входных и выходных величине, e,U) можно ввести функции принадлежности и лингвистические переменные, Причем функция принадлежности для U отражает качественное значение этой величины для пациента. Для нормированной функции принадлежности значения аргумента и самой функции
аключены в интервале 0.1. Значение 1 оответствует условию наибольшего расогласования с эталоном здоровья, а значе- ие О полное с ним совпадение. ингвистические переменные для функций 5 ринадлежностей могут быть представлены в виде терм-множеств нормированной шибки, ее производной и управляющего воздействия. Далее всех трех переменных приняты одинаковые интервалы: Б - боль- 10 шой, ВС - выше среднего, С - средний, НС - ниже среднего, М - малый. Н - близкий к нулю. На основании выбранных интервалов составлена таблица лингвистических правил для продукции типа: если 15
Ё N ё N| I / ( « N ) В C F N (о)Г м, U ( )
-Н ,то , fi ( Д if )С /г ( Д U ) - Д U , где Ј N: Ј м ( ° ) - максимальные значения переменных;20
,« (f N ) : / ( ):« ( Д U) - функции принадлежности лингвистических переменных:
ВС, Н и С - примеры термов.„
На основании данной теории в МК 20 происходит выделение максимумов входных сигналов и их преобразования в функции принадлежности лингвистических переменных„„
/ ( к N )i.2N exp Ki (I - к N ) , Ki 2; // F. N (o)e N(o) exp I -e N (o) ,K2 0,3.
В ОЗУ процессора хранятся решающие правила, собранные в таблицу лингви- 35 стических переменных, и осуществляется вычисление (выбор) управляющего воздействия также в виде лингвистической переменной /г ( Д U ). Функционирование МК 20 осуществляется таким образом, что про- 40 грамма начинается с задания таблицы лин- генетических переменных о виде целочисленного массива L(J, j). Далее с шины данных считываются лингвистические переменные /(ЈN)- ЕС1 и лингвистиче- 45 кие переменные (о) - ЕД1. После выбора знака ЕС1 и ЕД1 логически обрабатываются с присвоением новой перемен- ной М1 значения Р1 (± ЕС1) и новой переменной М2 Г2 (ЕД1) индексов массива L (J, ), после чего определяется значение
величины Z (M1. M2). Логическая обработка этой величины дает лингвистическую пе- ременную МЗ F3(z), которая в виде лингвистической переменной // (ДУ) поступает на вход функционального преобразователя, с помощью которого происходит обратное преобразование лингвистической переменной в цифровой код. Этот код поступает на вход Ф1 9, сигналы управления с выхода Ф1 9 определяют направление и угол поворота шагового двигателя, а следовательно, уменьшение или увеличение зазора, в устройстве сопло-заслонка. Тем самым происходит автоматическое управление величиной Vm(t) в направлении минимизации величины г (t ) .
Таким образом осуществляется работа аппарата с ауторегуляцией величины минутной вентиляции с учетом изменения интегральных параметров системы внешнего дыхания.
Формула изобретения , Аппарат искусственной вентиляции легких, содержащий генератор вдоха постоянного потока и систему управления, включающую формирователь сигналов управления временными параметрами, подключенные к первому и второму входам дыхательного контура с исполнительными механизмами, третий вход и выход которого связаны с тройником пациента, отличающийся тем, что, с целью повышения адекватности искусственной вентиляции легких, в тройнике пациента установлен первичный измерительный преобразователь, выход которого подключен к системе управления, которая снабжена последовательно соединенными измерительным преобразователем, сумматором, к второму входу которого подключен задатчик внутри- легочного давления, нечетким контроллером и формирователем сигналов управления скоростью потока, причем вход задатчика давления подключен к выходу формирователя сигналов управления временными параметрами, являющемуся первым выходом системы управления, вторым выходом которой служит выход формирователя сигналов управления скоростью потока, подключенный к четвертому входу дыхательного контура.
- пневматические связи
-электрически едя за Фие.2
Фиг.З
Г
С
Начало
массив L(J,j} Величины ЕС1,ЕД1
(-ЕС1) (ЈД1)
С нонеи ) Фиг.5
Ю
)
ФиеЛ
(-ЈС1) (ЈДП
Задание нобьм ЕС1 и ЕД1
Фиг.5
| Аппарат Энготрем Эрика | |||
| Проспект фирмы Гамбро | |||
| Швеция, 1988. |
