О СО 4 ОО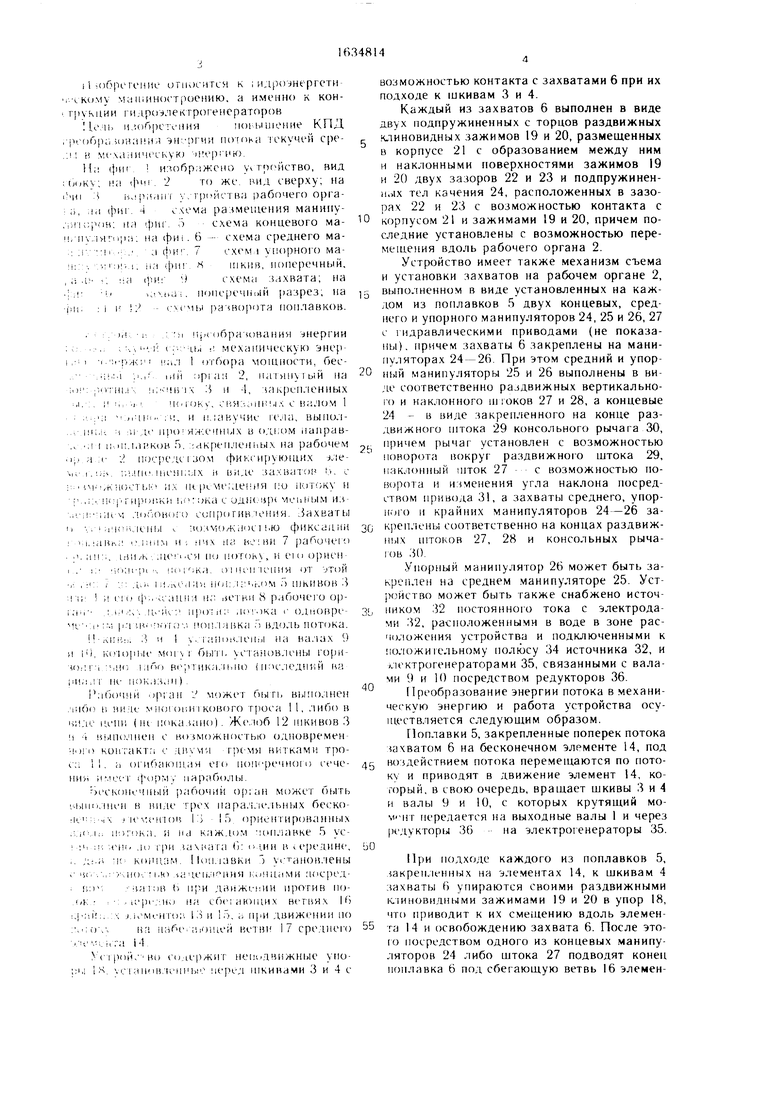
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТБОРА ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ | 2010 |
|
RU2519297C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕКУЩЕЙ СРЕДЫ | 2008 |
|
RU2388930C1 |
| УСТРОЙСТВО ДЛЯ УТИЛИЗАЦИИ ЭНЕРГИИ ТЕКУЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2005 |
|
RU2338085C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ МОРСКОГО ВОЛНЕНИЯ В ЭЛЕКТРОЭНЕРГИЮ | 1991 |
|
RU2049927C1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ЭНЕРГИИ ТЕКУЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2002 |
|
RU2212560C1 |
| УСТРОЙСТВО ОТБОРА ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ | 2008 |
|
RU2388931C1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ЭНЕРГИИ МОРСКИХ ВОЛН | 2012 |
|
RU2525986C2 |
| РЕЧНОЙ НАВИГАЦИОННЫЙ БУЙ СО ВСТРОЕННЫМ УСТРОЙСТВОМ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ГИДРАВЛИЧЕСКОГО ПОТОКА В ЭЛЕКТРИЧЕСКУЮ | 2005 |
|
RU2284276C1 |
| ДВИГАТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕКУЩЕЙ СРЕДЫ | 2002 |
|
RU2206786C1 |
| Циклонная печь для сжигания жидких отходов | 1988 |
|
SU1537961A1 |
Изобретение относится к гидроэнергетическому машиностроению Цель изобретения - повышение КПД преобразования энергии потока текучей среды в механическую энергию. Устройство для преобразования энергии потока текучей среды в механическую энергию содержит вал 1 отбора мощности, бесконечный рабочий орган, натянутый на поворотных шкивах 3 и 4, закрепленных выше и ниже по потоку и связанных с валом 1 отбора мощности, и плавучие тела, выполненные в виде протяженных в одном направлении поплавков 5, закрепленных на рабочем органе посредством фиксирующих элементов, выполненных в виде захватов 6, с возможностью их перемещения по потоку и транспортировки против потока с одновременным изменением лобового сопротивления Захваты 6 установлены с возможностью фиксации поплавка одним из них на ветви 7 рабочего органа, движущейся по потоку, и его ориентации поперек потока, отцепления от ветви 7 до достижения поплавком 5 шкивов 3 или 4 и его фиксации на ветви 8 рабочего органа, движущейся против потока с одновременным разворотом поплавка 5 вдоль потока. Поплавки 5, закрепленные поперек потока, под воздействием последнего перемещаются по потоку и приводят во вращение шкивы 3 и 4. По достижении поплавков шкивов 3 и 4 каждый поплавок 5 отцепляется от ветви 7 и посредством захвата 6, установленного на одном из его концов, закрепляется на сбегающей ветви 8 и транспортируется против потока Устройство имеет также манипуляторы для автоматического переключения поплавков 2с и 14 з п ф-лы, 12 ил to (Л
,
I
I OPpl It U1C OlIKKtriM К 11, OJHtprCTM tKOM ч П1 ИНО( ГрОСНИЮ a ИМеННО л КОН
i ) чции i и фен 1екгрогенераторов
К i и обре i нияюи ил nine КПД
1 обр O il iM ЭН ПИИ 1ННО| а ЧКХ ПЙ С|Х i ( 1111 Н L I К) р ИЮ
Н фш ишбр и-сно VVTKHCTBO вид
i I
II 1
, 1
})1П )
н i фи
I () И
I
го же ни i с вер на i pi t i в i рабочего opi а ма размещения маннпу схема концевого ма Ь txtMd среднего ма i. хч м i i орно о ма и s iMU B поперечный )i xi м i i 1хвага на
HOIK pi чн m pa зрез на мы pa «ворота потавков
1 л
HI
i
i
i) i i
M ОЦ kill I
I И It
UL
( транвания энергии a i мех п ичссклю jnip 1 моора мощности бее i in p i i 2 н 11 ui i ыи на
Mi 1 ч И 1 1 IKpUl 1СННЫХ I )h v i Я II I L В 1ОМ 1 IIИ I JFV Ис К Id ВЫПО I
l 1Ц10 HHlilHllXBOUOMHdllpdB
i ь ков r ikptn itii ых на рабочем i ) pi CIJOM финир ющих i e
ГЦ I I II IX it b II i 1 b П ) 11Ilk pc U It l |1Я I U il ) i K И
жа L одь( sp м 11 и з ; t iporuB ч ния 5ахват ю з к i it i l ю фикеац in i ix н н BII 7 к i
II II J I OrOh И till O|)Hl M
r 1 ) II I I ПИЯ Я ОИ
IIif I i t M ) ШКИВОВ 5
in it i н i S p точи о op
l| О I I Ж 1 О UiOBpl 10 1 IbK I В I) Ib IKiTOKd 1 1I ) U II I H I Bd 1 IX (1
It 401 S I Г)Ы II t I HlOB It НЫ 1 OpH
i in ) BI ,ч UK i и но ( и ч н ;MI и в
lit 111 1 4 II )
ННМ1И p ill MO/Kt I II B1M01HIH
i Bt к N 01 01 и i кового rpot а 11 IHOOB
1 I I UI1 ( lit I ( kd t IHO) /K( Юб 12 ШКИВОВ i Ч IHl 1IRH t BO 4MO/KHOt ГЫО OUlOBptMeH
) ков aki IB i i i имя BiiKTMn тро ii oi unaioii in ti поп pt 4Hoi ) 11 4i i i I m i lap 160 H,i
HlkOlklHHH p 1ООЧНИ op IH MO/kl I ОЫГЬ
IIRII в BUR rpl пара i it IBHUX 6t ko к шок I r орн(н i ированнпх ii i ii н i к i/K IOM on ывке S L
1 1 pti i IX I I 1 () KOHI M HO I H t I I В t
и
I
lOf
H
I
1 i i i i в к и u ii i um i
II, И ЫИ/Kl
ни i t |H uiH( ) Tcj,H)B 1ены
1Ц 1МИ l t pt t
ни против по
11 H M i L()t rHOIUHX H( T BHX I (l II И 1,ВИЖ( НИИ К)
cpi nil i о
I,ft
)1 it rl 141 Bl
)h
1 I
x ( I рои Bi t( tlp/hlir Htl ТЧИЖНЬК MIO
i i mi в i ill i к pt i шкивами 5 и 4 t
0
0
0
5
О
5
возможностью контакта с захватами 6 при их подходе к шкивам 3 и 4
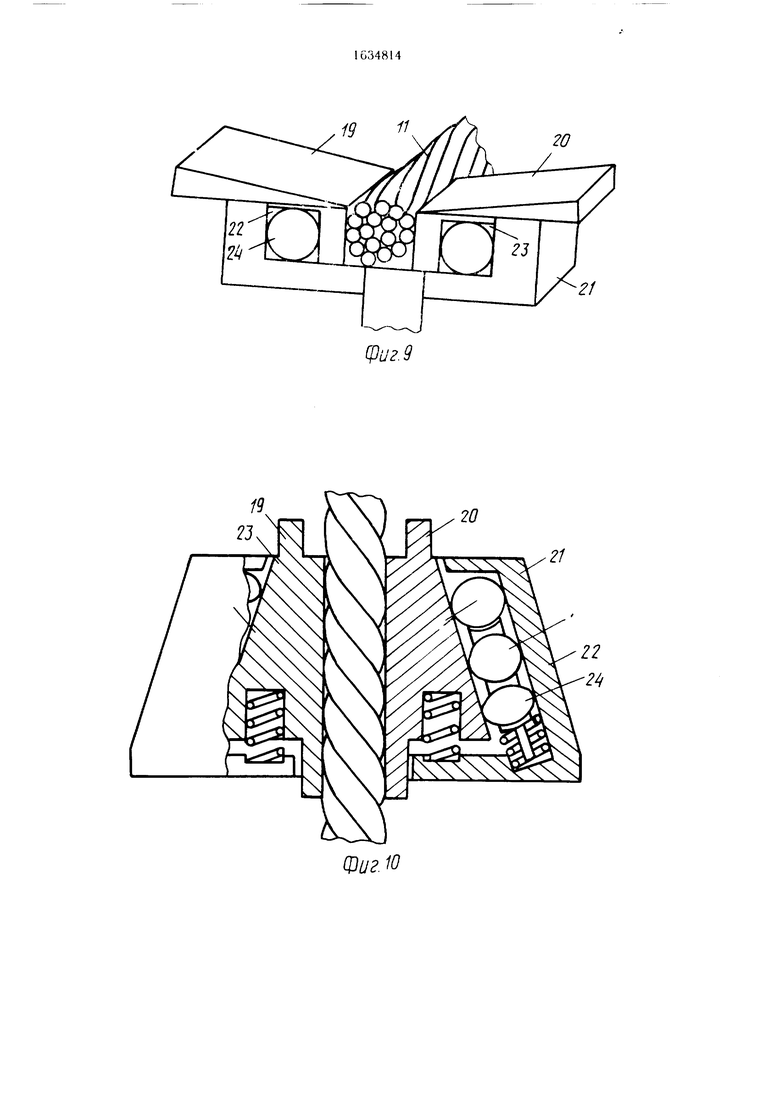
Каждый из захватов 6 выполнен в виде подпружиненных с торцов раздвижных клиновидных зажимов 19 и 20, размещенных в корпусе 21 с образованием между ним и наклонными поверхностями зажимов 19 и 20 заюров 22 и 23 и подпружинен a iix тел i-ачения 24 расположенных в зазо пах 22 и 2} с возможностью контакта с 21 и зажимами 19 и 20, причем по слет.ние установлены с возможностью пере мсщения вдоль рабочего органа 2
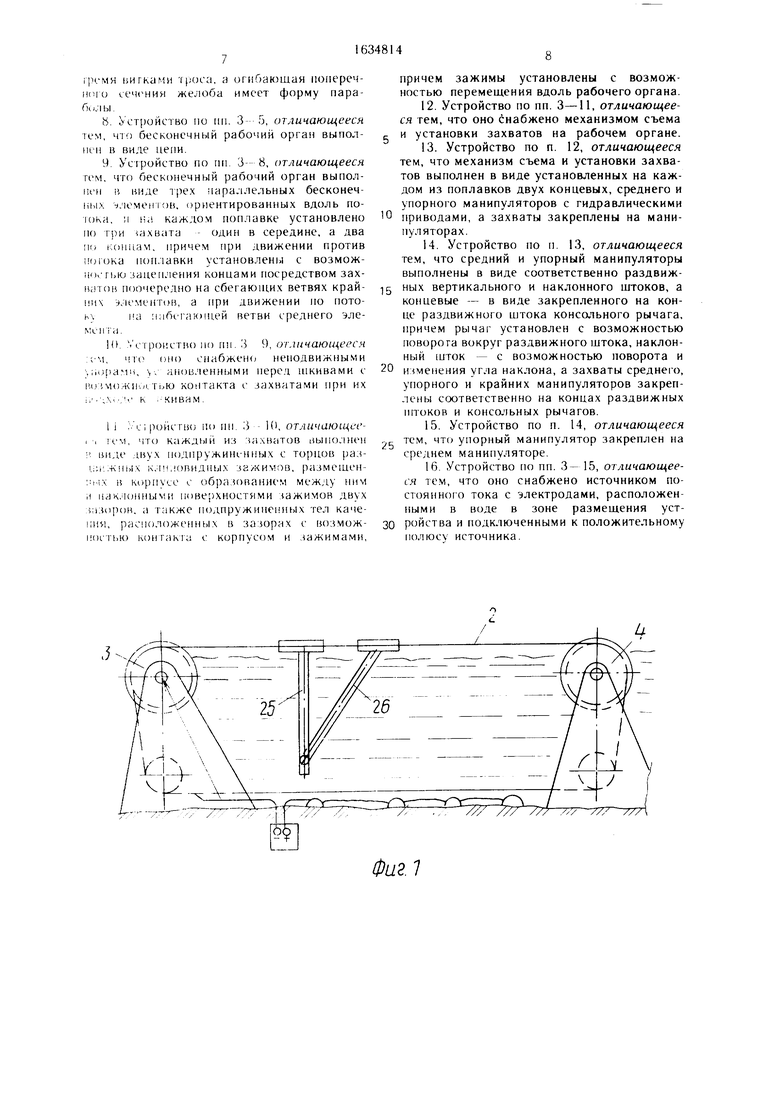
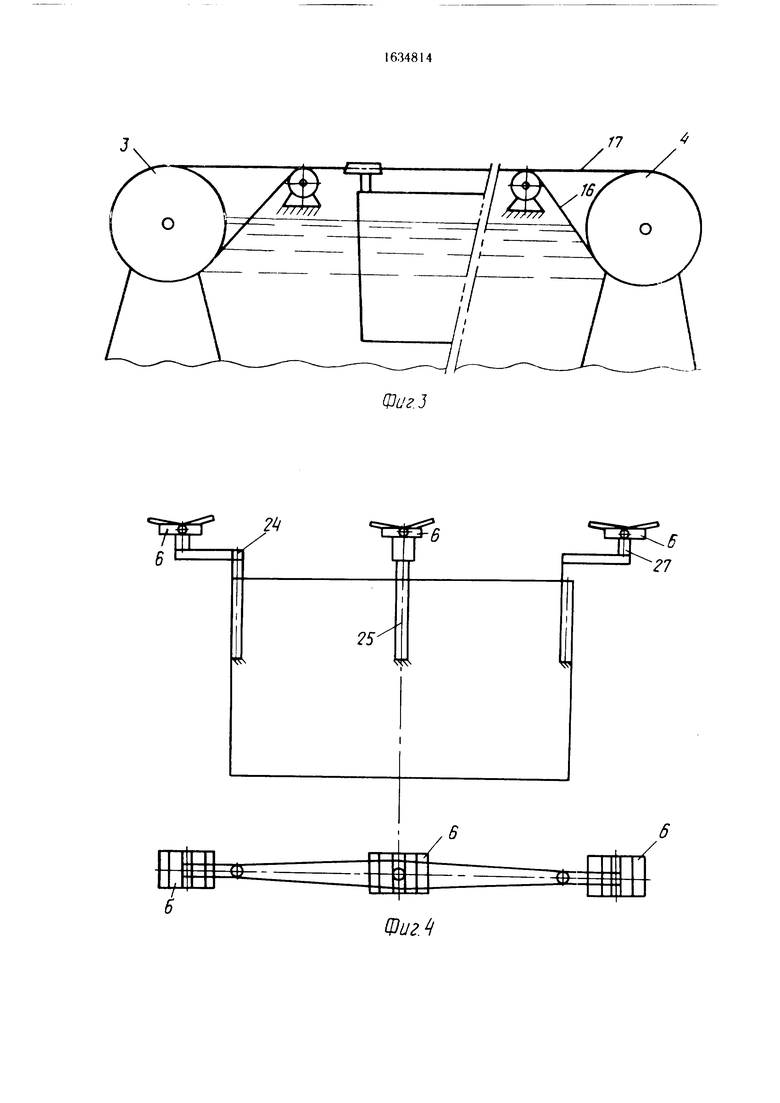
Устройство имеет также механизм съема и пановки охватов на рабочем органе 2, выполненном в виде становленных на каж
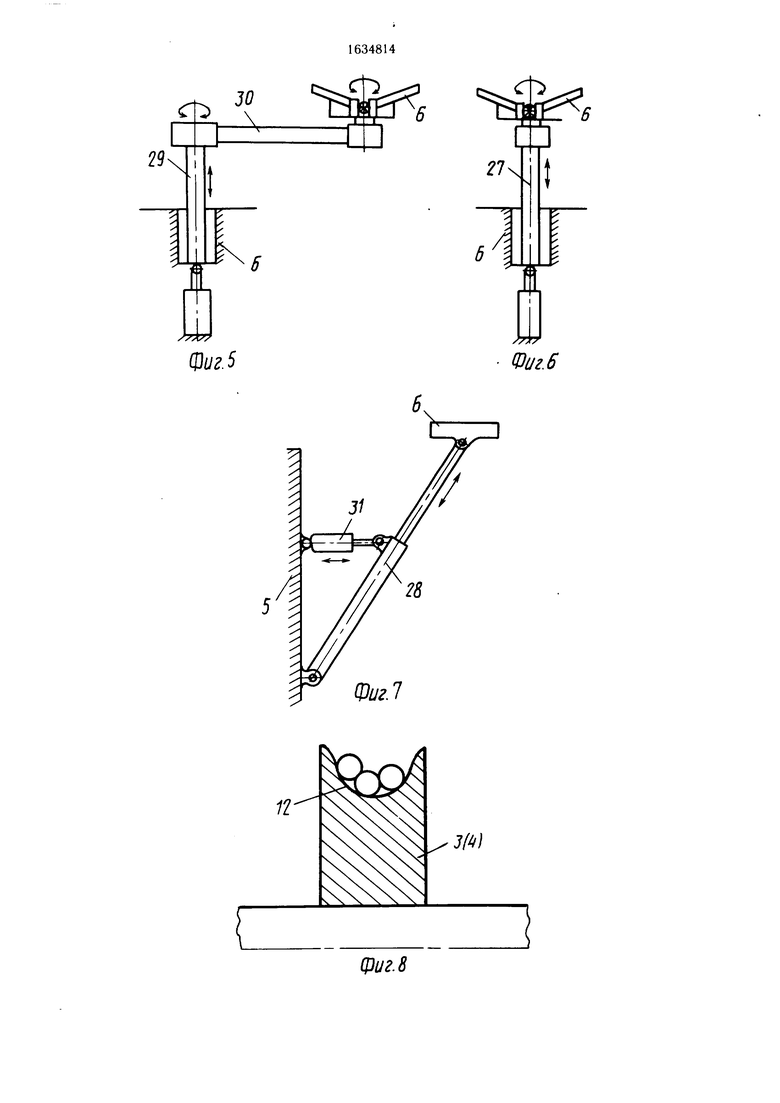
юм из поплавков S двух концевых, сред него и упорного манипуляторов 24 25 и 26 27 t iидравлическими приводами (не показа ны) причем захваты 6 закреплены на мани
нтяторач 24 26 При этом средний и упор ныи манип ляторы 25 и 26 выполнены в ви
а соответственно раздвижных вертикально
0и на к тонного ш оков 27 и 28 а концевые 21 в ви ie закрепленного на конце раз
1,вижного штока 29 консопьного рыча1а 30 причем рычаг становлен с возможностью поворота вокруг раздвижною штока 29 i житный шток 27 с возможностью по ворота и изменения угпа наклона гюсред ciBOM привода 31 а захваты среднего, упор нло и крайних манипуляторов 24-26 за креп .сны соответственно на концах раздвиж ных ШТО1ов 27 28 и консольных рыча
ов 50
норный мании) штор 26 может быть за ьр1 плен на среднем манип ляторе 25 Уст роист во может быть 1акже снабжено источ пиком 52 постоянною тока с электрода ми 52 pdvlIo oжeннымч в воде в зоне рас
юложения устройства и пот.ключенными к оложиильному полюсу 54 источника 32 и
1R ктрогенераторами 35 связанными с вала ми ( и 10 посредством редукторов 36
Преобразование энергии потока в механи чес КУЮ энергию и работа чстройства осу 1Ц1ствтяется следующим образом
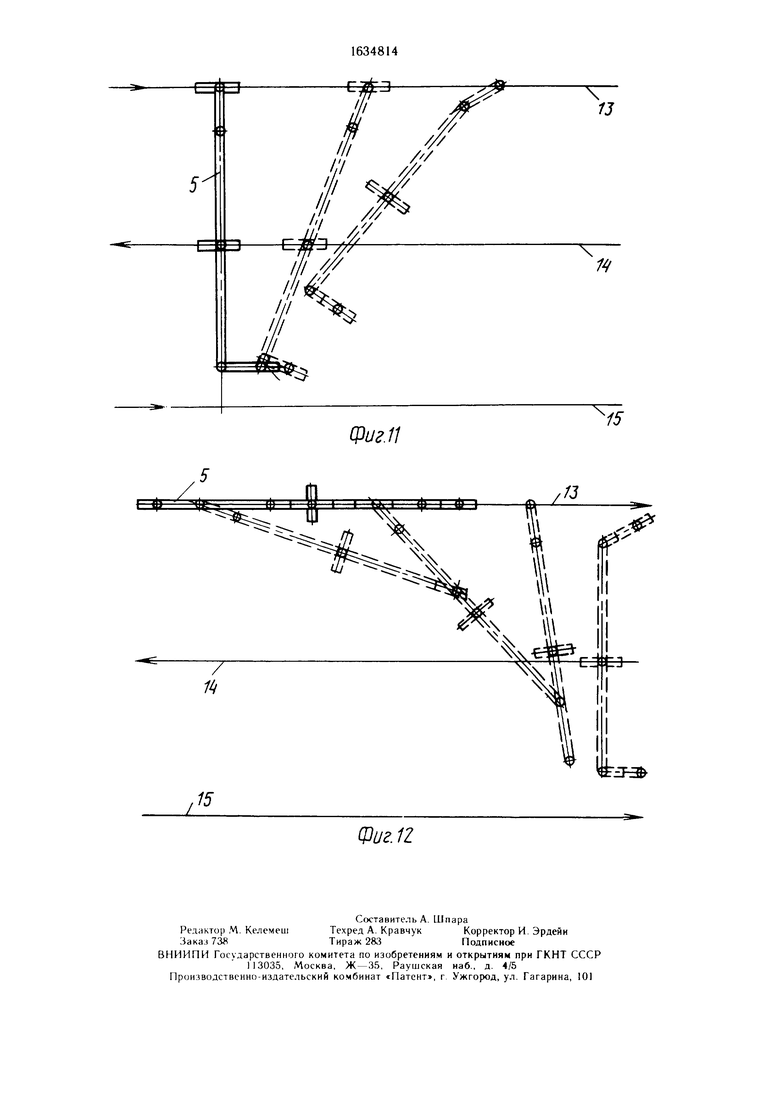
Потавки 5 закрепленные поперек потока захватом 6 на бесконечном элементе 14, под воздействием потока перемещаются по пото к и приводят в ;вижение элемент 14 ко |(рый в свою очередь вращает шкивы 5 и 4 и валы 9 и 10 с которых крутящий мо м нг передается на выходные ва 1ы 1 и через реакторы 56 на электровибраторы 35
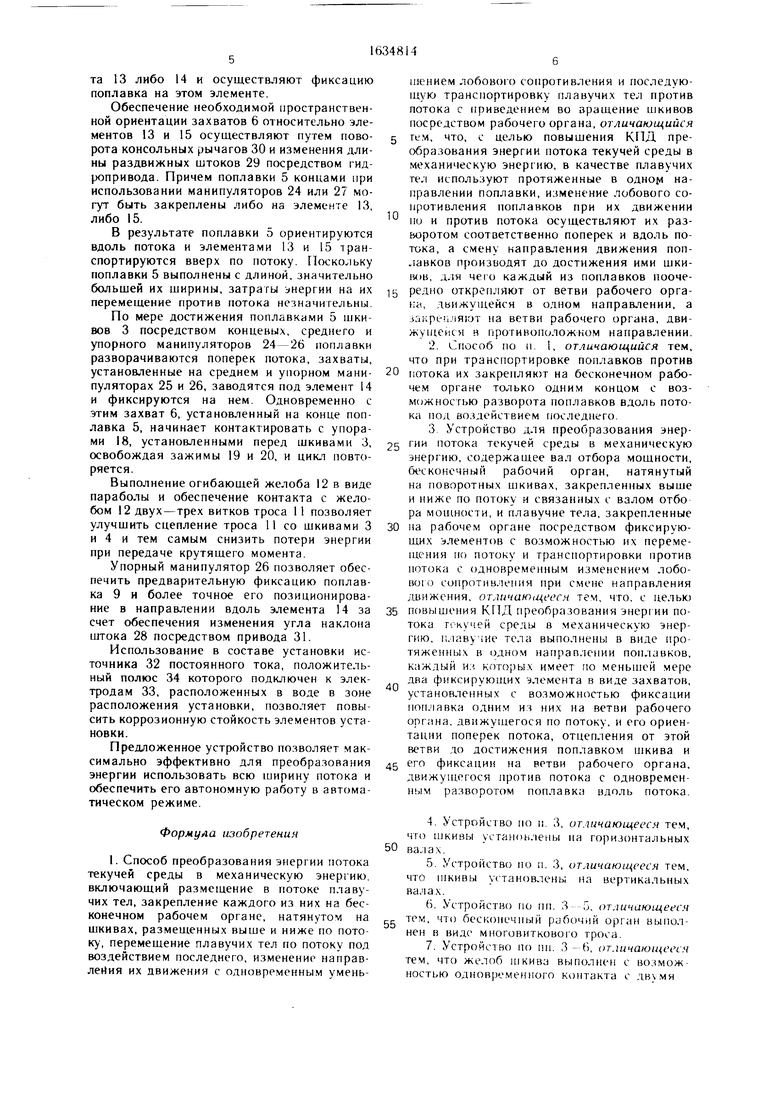
При подход каждого из поплавков 5 закреп а иных на э 1ементах 14 к шкивам 4 захваты 6 упираются своими раздвижными клиновиаными зажимами 19 и 20 в пор 18 что приводит к их смещению вдоль элемен га 14 и освобождению захвата 6 После это ю посредством одного из концевых манипу тгоров 24 шбо штока 27 подводят конец ион ывка 6 по I сбегающую ветвь 16 элемен
та 13 либо 14 и осуществляют фиксацию поплавка на этом элементе.
Обеспечение необходимой пространственной ориентации захватов 6 относительно элементов 13 и 15 осуществляют путем поворота консольных рычагов 30 и изменения длины раздвижных штоков 29 посредством гидропривода. Причем поплавки 5 концами при использовании манипуляторов 24 или 27 могут быть закреплены либо на элементе 13, либо 15.
В результате поплавки 5 ориентируются вдоль потока и элементами 13 и 15 транспортируются вверх по потоку. Поскольку поплавки 5 выполнены с длиной, значительно большей их ширины, затраты энергии на их перемещение против потока незначительны.
По мере достижения поплавками 5 шкивов 3 посредством концевых, среднего и упорного манипуляторов 24-26 поплавки разворачиваются поперек потока, захваты, установленные на среднем и упорном манипуляторах 25 и 26, заводятся под элемент 14 и фиксируются на нем. Одновременно с этим захват 6, установленный на конце поплавка 5, начинает контактировать с упорами 18, установленными перед шкивами 3, освобождая зажимы 19 и 20, и цикл повторяется.
Выполнение огибающей желоба 12 в виде параболы и обеспечение контакта с желобом 12 двух-трех витков троса 11 позволяет улучшить сцепление троса 11 со шкивами 3 и 4 и тем самым снизить потери энергии при передаче крутящего момента.
Упорный манипулятор 26 позволяет обеспечить предварительную фиксацию поплавка 9 и более точное его позиционирование в направлении вдоль элемента 14 за счет обеспечения изменения угла наклона штока 28 посредством привода 31.
Использование в составе установки источника 32 постоянного тока, положительный полюс 34 которого подключен к электродам 33, расположенных в воде в зоне расположения установки, позволяет повысить коррозионную стойкость элементов установки.
Предложенное устройство позволяет максимально эффективно для преобразования энергии использовать всю ширину потока и обеспечить его автономную работу в автоматическом режиме.
Формула изобретения
шением лобового сопротивления и последующую транспортировку плавучих тел против потока с приведением во вращение шкивов посредством рабочего органа, отличающийся
тем, что, с целью повышения КПД преобразования энергии потока текучей среды в механическую энергию, в качестве плавучих тел используют протяженные в одном направлении поплавки, изменение лобового сопротивления поплавков при их движении по и против потока осуществляют их разворотом соответственно поперек и вдоль потока, а смену направления движения поплавков производят до достижения ими шкивов, дли чего каждый из поплавков поочередно открепляют от ветви рабочего орга- кг, движущейся в одном направлении, а ззкре 1.||Я1от на ветви рабочего органа, движущейся в противоположном направлении. 2. Способ по п 1, отличающийся тем, что при транспортировке поплавков против
0 потока их закрепляют на бесконечном рабочем органе только одним концом с возможностью разворота поплавков вдоль потока под воздействием последнего
3 Устройство для преобразования энер5 гни потока текучей среды в механическую энергию, содержащее вал отбора мощности, бесконечный рабочий орган, натянутый на поворотных шкивах, закрепленных выше и ниже по потоку и связанных с валом отбо ра мощности, и плавучие тела, закрепленные
0 на рабочем органе посредством фиксирующих элементов с возможностью их перемещения по потоку и транспортировки против потока с одновременным изменением лобо- во о сопротивления при смене направления движения, отличающееся тем, чго, с целью
5 повышения КПД преобразования потока г . среды в механическую энергию, плаву ine тела выполнены в виде про- тяженныч в одном направлении поплавков, каждый и., которых имеет по меньшей мере два фиксирующих элемента в виде захватов, установленных с возможностью фиксации поплавка одним из них на ветви рабочего органа, движущегося по потоку, и его ориентации поперек потока, отцепления от этой ветви до достижения поплавком шкива и
5 ег° фиксации на ветви рабочего органа, движущегося против потока с одновременным разворотом поплавка вдоль потока.
5 Устройство по п. 3, отличающееся тем, что шкивы установлены на вертикальных валах.
0
pi мя ьигками а огибающая иопереч м i о ич(нин же юба имеет форму пара Си i ы
8 устройство но им 3 г) отличающееся км чю бесконечный рабочий орган выпол HI и в ви ie пени
Ч JyeipoucTBo по пи J 8 отличающееся пм чго бесконечный рабочий орган выпол lit н ни ie трех lapa.i тельных бесконеч ы i JICMOHI в ориентированных вдоль по юка i i а каж юм поп 1авке установлено по ipn ачватаодин в середине а два
I IOHU1M причем при шижении против о:ока поп ивки етанов ены с возмож to гью )ацеп 1ения концами посредством зах в i он поочере шо на сбегающих ветвях край н i : кменгов а при движении по пото tна i i6c i а ощеи ветви среднего зле
N с п а
10 ( г рои ч во ю пп } с) 01 шчающегсч
i и (но снабжено неподвижными
i мм лнов 1енными пере 1 шкивами с
п vu MI гию лочтакта i захватами при их
к чивам
I iроисIBG по пп } hi от гичающи
u i го каждыи и ы натов tibinointii вин IBV х по иных с торцов ра лЧ1 п г пидных з /кичмв разметен v ii корпч с i о6раи вани(м меж i ним пак ЮМНЫУИ поверхностями (ажимов I.BYX попон ,1 г жже по шр жиис||цы гел каче i in ра ю юженных в iaiopax с возмож i ot 11 ю кон мы с корпусом и ажимами
0
причем зажимы установлены с возмож ностью перемещения вдоль рабочего органа
12Устройство по пп 3-11, отличающее ся тем, что оно снабжено механизмом съема и установки захватов на рабочем органе
13Устройство по п 12, отличающееся тем, что механизм съема и установки захва тов выполнен в виде установленных на каж дом из поплавков двух концевых, среднего и чпорною манипуляторов с гидравлическими приводами а захваты закреплены на мани пупяторах
14Устройство по п 13, отличающееся тем, что средний и упорный манипуляторы выполнены в виде соответственно раздвиж
ных вертикального и наклонного штоков, а концевые - в виде закрепленного на кон це раздвижного штока консольного рычага причем рыча установлен с возможностью поворота вокруг раздвижного штока, наклон ныи шток - с возможностью поворота и
0 пленения уг ia наклона, а захваты среднею, упорного и крайних манипуляторов закреп нны соответственно на концах раздвижных ппоков и консольных рычагов
15Устройство по п 14 отличающееся тем что упорный манипулятор закреплен на
среднем манипуляторе
16Устройство по пп 3- 15, отличающее in тем что оно снабжено источником по сюянного тока с электродами, расположен ными в воде в зоне размещения уст ройства и подключенными к положительному молюе источника
0
Фиг 1
2Ц
Фиг.З
V7
Фиг 4
30
1634814
cb
N
4
ф(
12te.
28
Фиг. 7
т
фиг. 8
19
Фиг. ю
20
21
фиг. 9
20
21
Фиг.11
| Патент США № 3887817, кл F 03 В 13/10, опублик | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
