1
(21)4684210/03
(22)27.04.89
(46) 07.04.91. Бюл. № 13
(71)Всесоюзный научно-исследовательский и проектно-конструкторский институт нефтяного машиностроения
(72)С.И.Корнюшенко, Г.В.Новикова, С.В„Васильев, А.В.Демин,
Ю.П.Цареградский и И.Я.Вальдман
(53)622.242 (083.8)
(56)Авторское свидетельство СССР V 177378, кл. Е 21 В 7/02, 1964.
Авторское свидетельство СССР № 1062371, кл. Е 21 В 19/00, 1981.
(54)БУРОВАЯ УСТАНОВКА
(57)Изобретение относится к бурению скважины и позволяет повысить надеж-. ность работы буровой установки. На основании 1 базовой машины установки шарнирно установлена мачта из двух шарнирно связанных между собой звеньев 2 и 3 равной длины. На верхнем звене 3 установлен вращатель 4. Управление звеньями 2 и 3 осуществляется гидроцилиндрами (ГЦ) 5 и 6. Дополнительно установка снабжена ГЦ 7 управления вращателем 4, а система стабилизации заданного положения врашд-
теля - датчиком (Д) 13 положения вращателя 4, Д 17 дифферента базовой машины и задатчиком 18 углового положения базовой машины, которые выполнены в виде потенциометров. Система стабилизации выполнена в виде четы- рехполюсной мостовой схемы. Измерительная диагональ черырехполюсника подключен к усилителю 19. Выход усилителя 19 соединен с управляющими входами гидрораспределителей 8 и 9 ГЦ 5 и 6 управления звеньями 2 и 3 мачты. На осях сочленения основания со звеном 2 и звена 2 со звеном 3 установлены датчики 11 и 12 положения звеньев 2 и 3. Возникшие во время бурения отклонения вращателя 4 от оси скважины фиксируются Д 11-13. Баланс мостовой схемы нарушается Сигнал с усилителя 19 управляет че-1 рез гидрораспределитель 8 или 9 ГЦ 5 или 6. Поворот звена 2 или 3 мачты ликвидирует рассогласование. Возникающий при бурении дифферент базовой машины учитывается . Угол наклона скважины задается задатчиком 18, включенным в другое плечо мостовой схемы. 1 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая установка | 1989 |
|
SU1643700A1 |
| Буровая установка | 1981 |
|
SU1062371A1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ СКВАЖИН | 2009 |
|
RU2392409C1 |
| БУРОВАЯ УСТАНОВКА | 2012 |
|
RU2522472C2 |
| БУРОВАЯ УСТАНОВКА | 2003 |
|
RU2249665C1 |
| БУРОВАЯ ЭЛЕКТРОМАШИНА (ВАРИАНТЫ) | 2022 |
|
RU2793524C1 |
| Буровая установка с телескопической мачтой | 2022 |
|
RU2799924C1 |
| БУРИЛЬНО-КРАНОВАЯ МАШИНА | 2006 |
|
RU2306398C1 |
| ГИДРАВЛИЧЕСКИЙ КЛЮЧ ДЛЯ СТРАГИВАНИЯ РЕЗЬБЫ БУРОВОГО СТАВА | 2008 |
|
RU2398951C2 |
| БУРОВАЯ УСТАНОВКА | 2019 |
|
RU2717843C1 |
Изобретение относится к горной промышленности, а именно к буровым установкам вращательного бурения.
Целью изобретения является повышение надежности буровой установки, в работе.
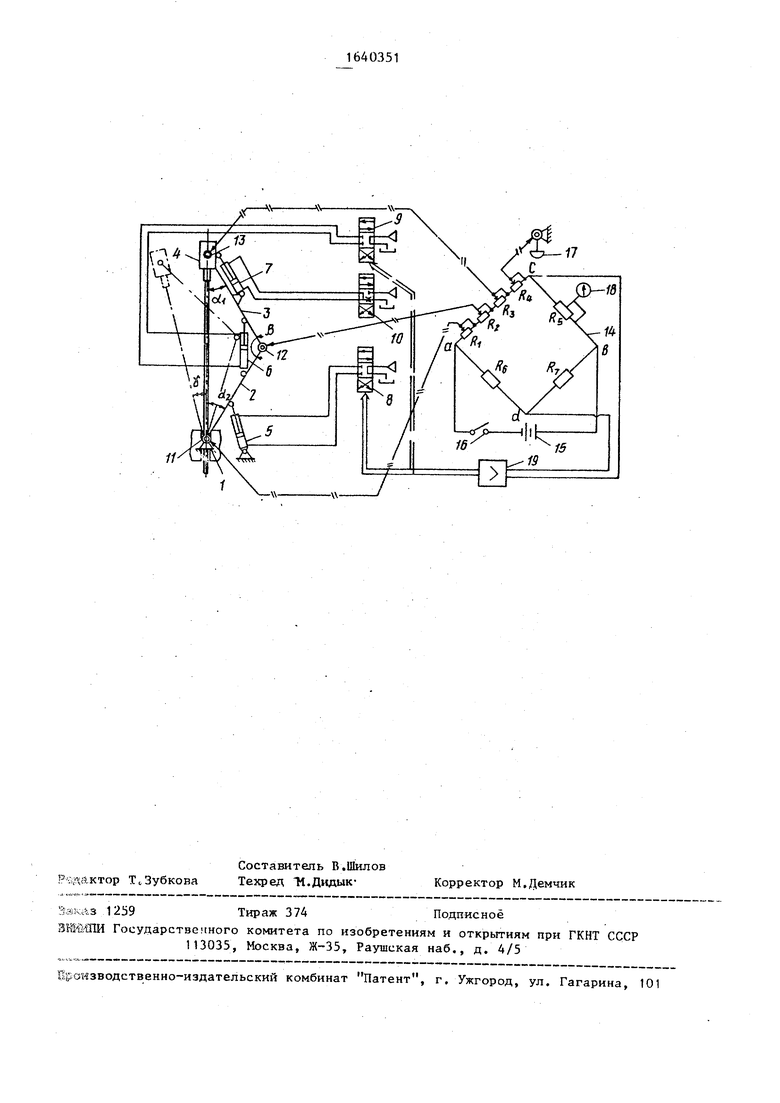
На чертеже приведена схема предлагаемой буровой установки.
Буровая установка включает основание 1, например, базовой машины, на котором шарнирно установлена мачта с нижним 2 и верхним 3 звеньями равной длины. На верхнем звене 3 шарнирно установлен вращатель 4. Нижним звеном 2 управляет шарнирно связанный с ним гидроцилиндр 5, другой конец
164
которого шарнирно установлен на основании 1. Верхним звеном управляет гидроцилиндр Ь, шарнирно связанньй с верхним и нижним звеньями$ а вращателем 4 управляет гидроцилиндр 7, который задемпфирован. Гидроцилиндры 5-7 связаны магистралями соответственно с гидрораспределителями 8-10 управления ими. В точках шарнирного сочленения основания 1 с нижним звеном 2, нижнего и верхнего звеньев между собой и вращателя с верхним звеном 3 размещены соответственно датчики 11, 12, 13 положения COOT- ветственно нижнего звана 2, верхнего звена 3 и вращателя 4. Датчики 11-13 выполнены в виде потенциометров R, R2 и R3H включены в мостовую схему 14. Четырехполюсник abed питается
от источника 15 бортовой электроэнергии (если основанием является рама базовой машины), соединенного с его диагональю ab. Тумблер 16 служит для замыкания цепи. Для компекса ции возможного дифферента основания, на котором установлено буровое оборудование, в мостовую схему включен потенциометр R4 датчик дифферента,
который кинематически соединен с от
весом 17. Поскольку буровое оборудование такого вида предлагается устанавливать на базовой машине, то основанием будет являться рама базовой машины (или прицепа), В таком случае отвес 17 устанавливается на самой базовой машине (или на прицепе). При установке оборудования на стационар- ном основании отвес устанавливается на последнем.
Потенциометры R, R, R3H R включены последовательно в плечо ас четырехполюсника. В плечо be включен R5 задатчик 18 углового положения бурильной колонны. Сам задатчик 18 устанавливается на пульте управления или в кабине бурильщика и имеет градуированный лимб. К диагонали cd подключается электрогидравлическнп усилитель 19, связанньй с гидрораспределителем 8 или 9. В плечах ad и db установлены потенциометры R и R7. Четырехполюсник abed с включенными в него датчиками и усилитель образуют систему стабилизации заданного положения вращателя. В гидрораспределителе 10 размещен дроссель, с помощью которого задемпфирован гидроцилиндр 7 вращателя.
Q
5
0
5
,-,
5
0
Установка работает следующим образом.
В процессе бурения гидроцилиндр 7 управления вращателем находится в плавающем положении, поэтому положение вращателя определяется колонной труб, а при ее отсутствии - действием силы тяжести. Бурение осуществляют путем вращения колонны труб и создания нагрузки на буровой инструмент гидроцилиндрами 5 и 6. Осевое перемещение вращателя 4 выдерживается, если изменение угла 0 между нижним 2 и верхним 3 звеньями мачты происходит вдвое быстрее, чем изменение угла йЈ между осью скважины и любым из звеньев, т.е. Д ft 2-UOi.
При отклонении вращателя от оси скважины может произойти поломка колонны .,
В случае несоответствия заданному положению вращателя, например, вследствие провисания верхнего звена 3, фиксируемое датчиками 12 и 13 положения изменяется сопротивление потенциометра R3 на величину AR 3 и сопротивление R на величину AR .Тогда
Bf 4 liB i JlliJ57 f R;
поскольку величины R и R изменились.
Сумма изменений R2 и R приводит к появлению в диагонали cd тока, который подается на электрогидравлический усилитель 19. С последнего сигнал поступает на гидрораспределитель 8, который с помощью гидроцилиндра 5 изменяет положение нижнего звена 2, поворачивая его на угол, равный углу поворота верхнего звена 3, и возвращая на ось скважины вращатель. При этом изменяется и сопротивление потенциометра и рассогласование устраняется. Если изменение положения вращателя произошло из-за отклонения нижнего звена 2 и изменилось сопротивление потенциометра R на величину AR., то с электрогидравлического усилителя 19 сигнгп поступит на гидрораспределитель 8 и нижнее звено 2 вернется в исходное положение и изменит на исходное сопротивление потенциометра R(.
Выше рассмотрен вариант связи электрогидравлического усилителя 19 с гидрораспределителем 8. Аналогичной будет работа устройства по связи
усилителя 19 с гидрораспределителем 9.
Если в процессе работы базовая машина, несущая буровое оборудование располагается на наклонной поверхности (например, из-за неровностей неспланированной площадки), то в этом случае меняется сопротивление потешр-юметра R4. В результате возникает ток рассогласования в диагонали cd и усилитель 19 посылает сигнал на гидрораспределитель, например, 8, который корректирует положение нижнего 2 звена для того, чтоб угол наклона оси скважины к горизонту оставался неизменным и не зависел от положения базовой машины.
В случае связи усилителя 19 с гид pop а с пред ели тел ем 9 последний управляет положением верхнего звена для корректировки угла наклона оси скважины.
При необходимости бурения скважины под углом ft машинист до начала бурения с помощью задатчика 18 углового положения бурильной машины устанавливает заданный угол наклона колонны труб к вертикали и затем включает тумблер 16. Поскольку отно $
шение
К,
изменилось из-за изменения
значения R,-, должно измениться и отношение
Кч+Кг+Кз+Кф
R
(,
В результате
возникновения тока в диагонали cd гидрораспределитель 8 (или 9) через усилитель 19 получает сигнал и устанавливает звено 2 (или 3) в соответствующее положение, изменяя в нужную сторону сопротивление потенциометров R, и ся в
R9 (или Rg, R3), т.е. приводит- соответствие равенство
5ji l±RI± 15 R6 R
Буровая установка может осуществлять спускоподъемные операции при разомкнутой цепи путем управления верхним и нижним звеньями и вращателем гидроцилиндрами 5-7. С помощью гидроцилиндров 5 и 6 вращатель подводят к магазину труб, гидроцилиндром 7 вращатель поворачивают для захвата трубы, приводом вращателя наворачивают трубу на ниппель шпинделя, а затем гидроцилиндрами 5-7 поворачивают и одновременно поднимают трубу, на конце которой крепят долото. После проходки на длину трубы ее закрепляют в механизме поддержания бурильной
колонны (на чертеже не показан), отвинчивают от трубы втиндель вращателя, берут вращателем из магазина очередную трубу, выносят на ось скважины, свинчивают с колонной и продолжают бурение.
Предлагаемое устройство позволяет осуществлять стабилизацию направления движения вращателя при воздействии только на одно звено (нижнее 2 или верхнее 3). При этом второе звено автоматически устанавливается в нужное положение, а вращатель устаJ5
5
0
5
0
5
0
5
0
оси его крепления под действием сил тяжести или под действием колонны труб. Установка надежна и проста в управлении.
Формула изобретения
Буровая установка, включающая базовую машину с основанием, на котором шарнирно установлена мачта из двух шарнирно связанных между собой звеньев равной длины, на верхнем из которых шарнирно установлен вращатель, гидроцилиндры управления верхним и нижним звеньями и систему стабилизации заданного положения вращателя с датчиками положения нижнего и верхнего звеньев, установленными соответственно на осях сочленения основания с нижним звеном и нижнего звена с верхним звеном, отличающаяся тем, что, с целью повышения надежности в работе, она снабжена гидроцилиндром управления вращателем, а система стабилизации заданного положения вращателя снабжена датчиком положения вращателя, датчиком дифферента базовой машины и за- датчиком углового положения бурильной колонны, которые выполнены в виде потенциометров, при этом система стабилизации заданного положения вращателя выполнена в виде четырех- полюсной мостовой схемы, измерительная диагональ которой подключена к усилителю, датчики положения нижнего звена, верхнего звена, вращателя и дифферента базовой машины включены в одно плечо четырехполюсника, а задатчик угла наклона бурильной колонны - в другое плечо,причем выход усилителя соединен с управляющим входом гидрораспределителя гидроцилиндра управления верхним или нижним звеном.
//
