Изобретение относится к области авиационного приборостроения и может быть использовано в датчиках высоты, скорости и т.д., сопрягаемых с бортовой цифровой вычислительной машиной (БЦБМ).
Целью изобретения является упрощение конструкции и уменьшение инерционности датчика.
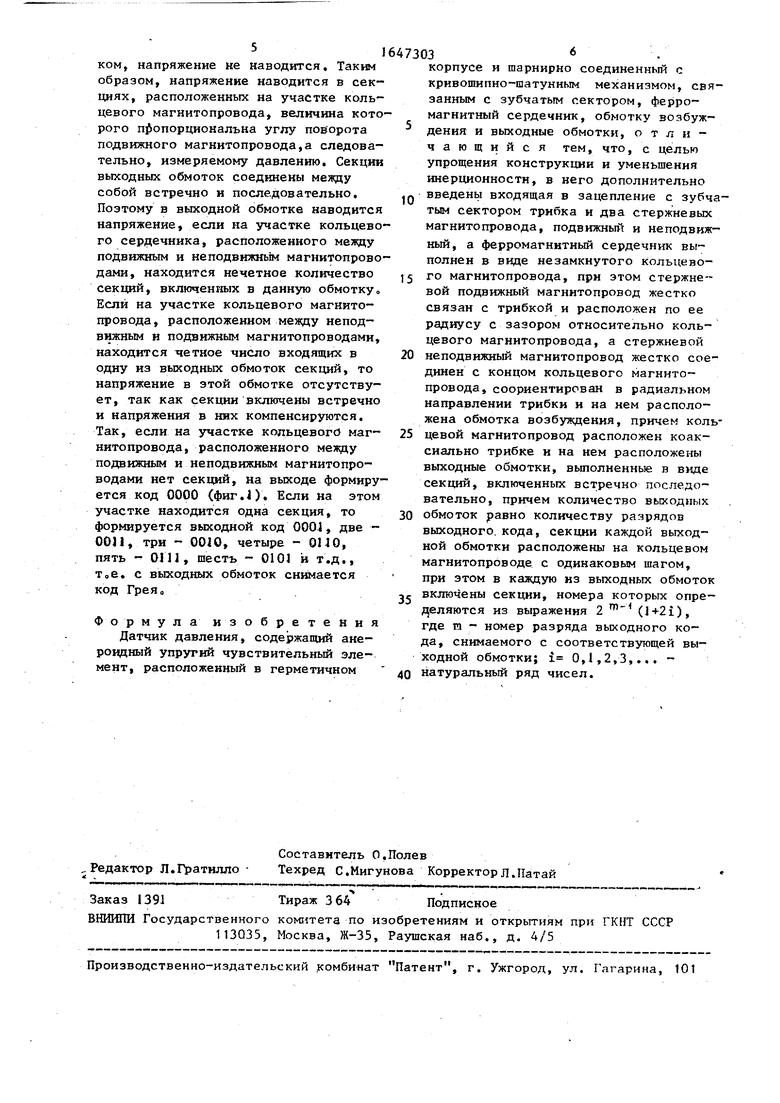
На -чертеже представлена функциональная схема предлагаемого датчика с 4-разрядным выходным кодом„
Датчик давления содержит упругий чувствительный элемент 1, расположенный в герметичном корпуса 2 и шарнир- но соединенный с кривошипно-шатунным механизмом, состоящим из шатуна З, кривошипа 4, зубчатый сектор 5, находящийся в зацеплении с трибкой 6„ Между трибкой 6 и ферромагнитным сердечником 7, представляющим собой незамкнутый кольцевой сердечник, расположены подвижный магнитопровод 8, жестко связанный с трибкой 6, и неподвижный магнитопровод 9, на которой расположена обмотка 10 питания, выходные обмотки 11-14, выполненные в виде секций, расположены на незамкнутом кольцевом сердечнике 7 с одинаковым шагом. Число выходных обмоток равно количеству разрядов выходного кода. В выходной обмотке секции включаются последовательно, каждая секция соединена с соседней секцией данной обмотки встречно. Выходная обмотка 11 первого разряда включает секции нечетных номеров, т.е. 1, 3, 5, 7, 9 и И и т„д, секции. Выходная обмот- ка 12 второго разряда включает сек- ; ции, номера которых равны 2, б 10
я 14 и т.д. Выходная обмотка J3 третьего разряда включает 4 и 12 секции. Выходная обмотка 14 четвертого разряда включает 8 и т.д. секции. Номер Секций, включенных в каждую из выходкых обмоток, можно определить из выражения 2|Г1Н (1+21), где m - номер разряда кода, снимаемого с соответствующей выходной обмотки; i 0,1,2, 3,. 0., - натуральный ряд чисел. 06мотка 10 питания запнтывается переменным напряжением U. Выходной сигнал в виде кода Грея снимается с выходных обмоток 41-44. Наличие напряжения в выходной обмотке соответствует кодовому символу 4, а отсутствие - кодовому символу О.
Устройство работает следующим образом,,
При подаче давления Р в корпус
2 прибора чувствительный элемент 4 прогибается, его подвижный центр перемещается поступательно на некоторую величину, зависящую от величины Р0 Далее кривошипно-шатунная передача
3 и 4, зубчатый сектор 5 и трибка 6 преобразуют поступательное движение жесткого центра чувствительного элемента I во вращательное движение подвижного магнитопровода 8. Напряжение 11, приложенное к обмотке JO питания, создает магнитный поток $), который замыкается через неподвижный магнитопровод 9, часть кольцевого незамкнутого магнвтопровода 7
в через подвижный магнитопровод 8. В секциях выходных обмоток, которые пересекаются магнитным потоком т, наводится напряжение, а ц секциях, которые не пересекаются магнитным потоком, напряжение ке наводится. Таким образом, напряжение наводится в секциях, расположенных на участке кольцевого магнитопровода, величина которого пропорциональна углу поворота подвижного магнитопровода,а следовательно, измеряемому давлению. Секции выходных обмоток соединены между собой встречно н последовательно. Поэтому в выходной обмотке наводится напряжение, если на участке кольцевого сердечника, расположенного между подвижным и неподвижным магнитопрово дами, находится нечетное количество секций, включенных в данную обмотку Если на участке кольцевого магнитопровода, расположенном между неподвижным н подвижным магнитопроводами, находится четное число входящих в одну из выходных обмоток секций, то напряжение в этой обмотке отсутствует, так как секции включены встречно и напряжения в них компенсируются. Так, если на участке кольцевого магнитопровода, расположенного между подвижным и неподвижным магнитопроводами нет секций, на выходе формируется код 0000 (фиг.1). Если на этом участке находится одна секция, то формируется выходной код 0004, две - ООП, три - 0010, четыре - 014О, пять - 0114, шесть - 0101 и т.д., т„е. с выходных обмоток снимается код Грея о
Формула изобретения Датчик давления, содержащий ане- роидный упругий чувствительный элемент, расположенный в герметичном
1647303
0
5
0
5
0
5
0
корпусе и шарнирно соединенный с кривошипно-шатунным механизмом, связанным с зубчатым сектором, ферромагнитный сердечник, обмотку возбуждения и выходные обмотки, отличающийся тем, что, с целью упрощения конструкции н уменьшения инерционности, в него дополнительно введены входящая в зацепление с зубчатым сектором трибка и два стержневых магнитопровода, подвижный и неподвижный, а ферромагнитный сердечник выполнен в виде незамкнутого кольцевого магнитопровода, при этом стержневой подвижный магннтопровод жестко связан с трибкой и расположен по ее радиусу с зазором относительно кольцевого магнитопровода, а стержневой неподвижный магнитопровод жестко соединен с концом кольцевого магнитопровода, соориентирован в радиальном направлении трибки и на нем расположена обмотка возбуждения, причем кольцевой магнитопровод расположен коак- сиально трибке н на нем расположены выходные обмотки, выполненные в виде секций, включенных встречно последовательно, причем количество выходных обмоток равно количеству рачрядов выходного кода, секции каждой выходной обмотки расположены на кольцевом магнитопроводе с одинаковым шагом, при этом в каждую из выходных обмоток включены секции, номера которых определяются из выражения 2 ГТ) (1+21), где PI - номер разряда выходного кода, снимаемого с соответствующей выходной обмотки; i 0,1,2,3,... - натуральный ряд чисел.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик давления | 1991 |
|
SU1817840A3 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Устройство для дистанционного определения положения объекта | 1983 |
|
SU1211596A1 |
| Преобразователь для бесконтактной передачи сигналов постоянного тока с вращающегося объекта | 1981 |
|
SU1017927A1 |
| Датчик давления | 1987 |
|
SU1451565A1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| Преобразователь перемещений | 1978 |
|
SU769307A1 |
| Функциональный преобразователь перемещений | 1985 |
|
SU1285492A1 |
| Трансформаторный датчик угла поворота | 1990 |
|
SU1768952A1 |
Изобретение относится к области авиационного приборостроения и может быть использовано в датчиках высоты, скорости и т.д., сопрягаемых, с бортовой цифровой вычислительной машиной (БЦВМ). Цель изобретения - упрощение конструкции и уменьшение инерционности датчика. Датчик давления содержит анеровдный упругий чувствительный элемент 1, расположенный в герметическом корпусе 2 и шарнирио соединенный с крявошипно-шатунным механизмом, связанным с зубчатым сектором 5, с которым находится в зацеплении трибка 6 с жестко закрепленным на ней подвижным магнитопро- водом 8. Подвижный магнитопровод 8 и неподвижный магнитопровод 9, на котором расположена обмотка питания 40, расположены между тркбкой и ферромагнитным сердечником 7, представляющим собой незамкнутый коль цевой сердечник На сердечнике 7 расположены выходные обмотки, секции которых включены встречно-последос 8 (Л
| Датчик давления | 1987 |
|
SU1451565A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
