ON VI
ы
VI
СЯ
Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения удельной электрической проводимости неферромагнитных электропроводящих материалов.
Цель изобретения - повышение точности контроля - достигается за счет более полного подавления влияния неконтролируемых параметров.
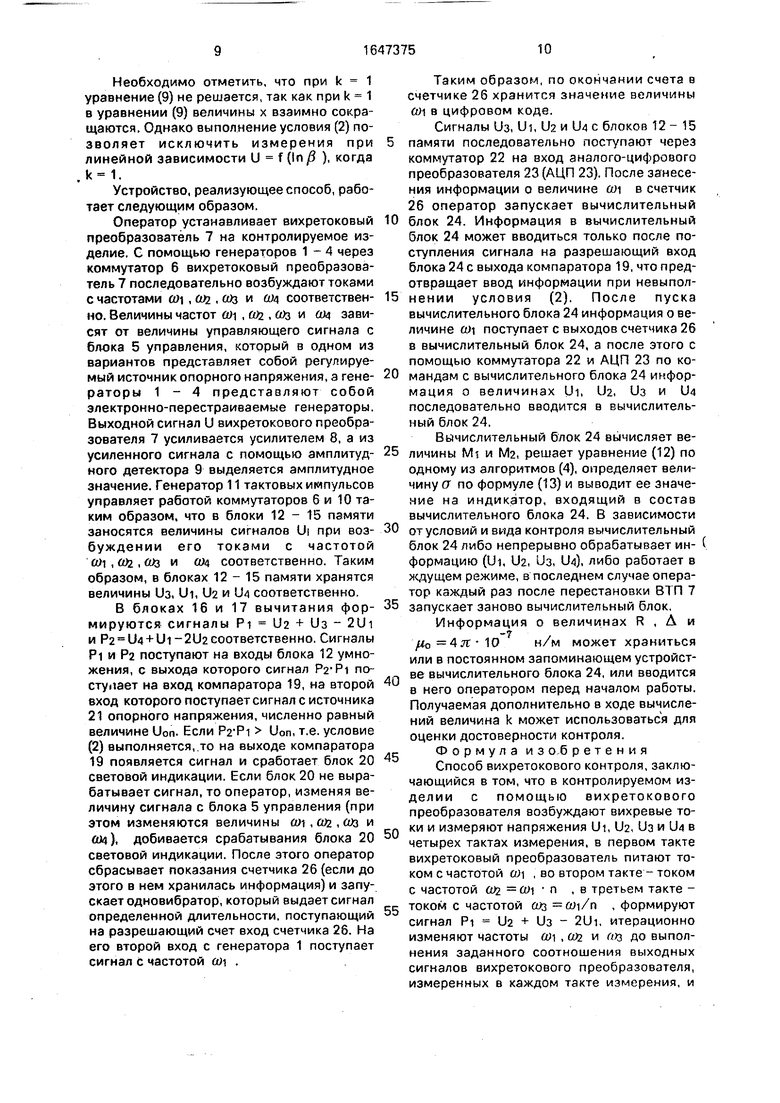
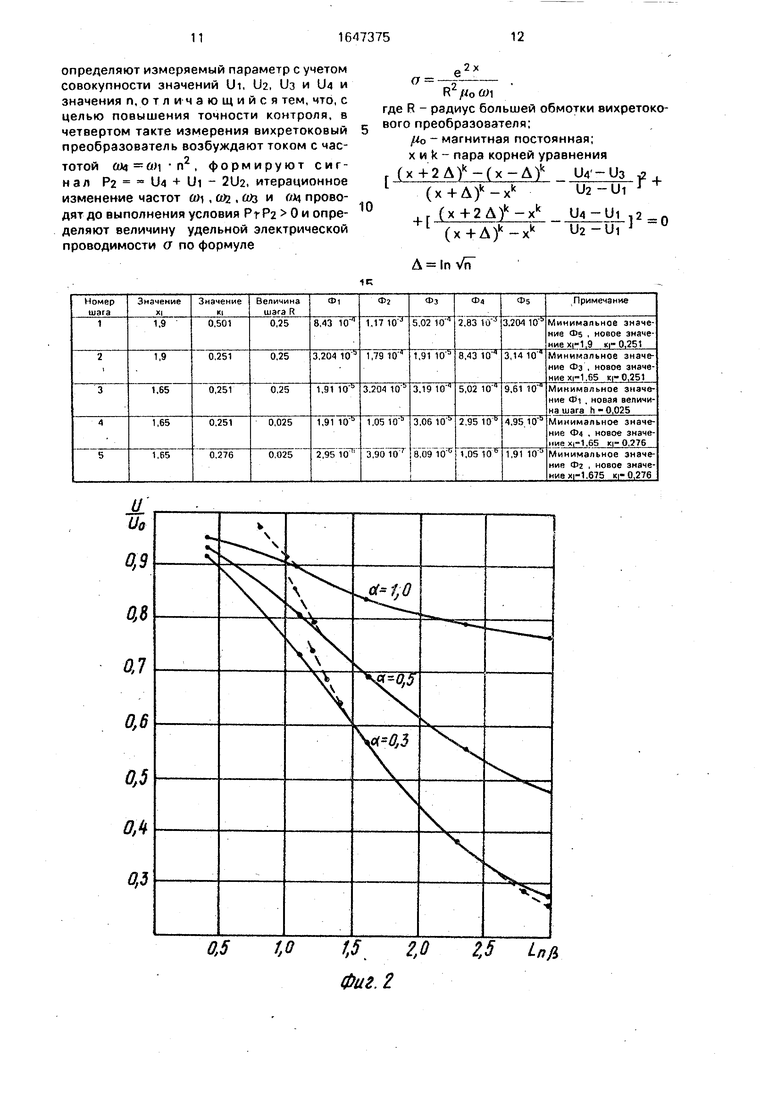
На фиг. 1 представлена структурная схе- ма устройства, реализующего способ вихре- токового контроля; на фиг.2 сплошной линией изображены зависимости величины U/Uo от величины In ft для различных значений а - - при у - r/R - 0,5 ,
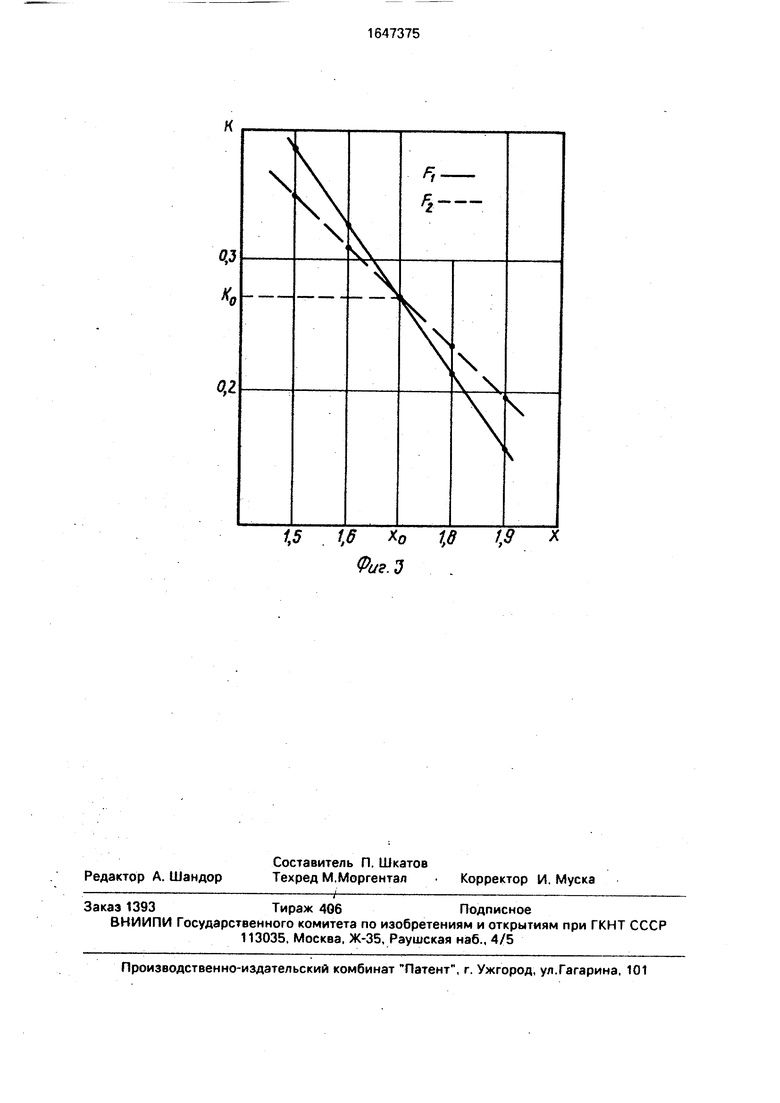
где Ui, Uo - выходное напряжение вихретоково- го преобразователя (ВТП), установленного соответственно на изделии и в воздухе, Н - зазор между ВТП и изделием, г - радиус меньшей обмотки ВТП (пунктирной линией показаны графики аппроксимирующей функции на тех участках, где они отличаются от реальной зависимости); на фиг.З - зависимости k(x), иллюстрирующие способ.
Устройство, реализующее способ вих- ретокового контроля материалов, содержит генераторы 1-4 переменного тока, управляющие входы которых подключены к блоку 5 управления, а выходы - к коммутатору 6, последовательно соединенные вихретоко- вый преобразователь 7, вход которого подключен к выходу коммутатора б, усилитель 8, амплитудный детектор 9 и коммутатор 10, генератор 11 тактовых импульсов, подклю- ченный к управляющим входам коммутаторов б и 10, блоки 12 - 15 памяти, входы которых подключены к выходам коммутатора 10, блок 16 вычитания, входы которого соединены с блоками 12 - 14 памяти, блок 17 вычитания, входы которого соединены с блоками 13, 14 и 15 памяти, последовательно соединенные блок 18 умножения, входы которого соединены с выходами блоков 17 и 16 вычитания, компаратор 19 и блок 20 световой индикации, источник 21 опорного напряжения, подключенный к второму входу компаратора 19,
Устройство содержит также последовательно соединенные коммутатор 22, входы которого соединены с выходами блоков 12 - 15 памяти, аналого-цифровой преобразовав тель 23 и вычислительный блок 24, управляющие входы коммутатора 22 и аналого-цифрового преобразователя 23 со- единены с выходами вычислительного блока 24, последовательно соединенные одновибратор 25 и счетчик 26, второй вход которого соединен с выходом генератора 1, а выходы - с вторым входом вычислительного блока 24. Разрешающий ввод информации вход вычислительного блока 24 соединен с выходом компаратора 19.
Способ осуществляют следующим образом.
Вихретоковый преобразователь 7 устанавливают на контролируемое изделие и проводят четыре такта измерения его выходных сигналов Ui, U2, Уз и U4. В первом цикле вихретоковый преобразователь 7 возбуждают током с частотой а), во втором - током с частотой аъ в) п , где п 1, в третьем - током с частотой из ft)i/n , в
четвертом - током с частотой ац ш п2 .
Зависимость U от величины In/3 точно аппроксимируется выражением ви- да U в0 4- #i In ft на небольшом участке изменения ft (фиг.2). Если измерение проводится при ft (например, когда необходима определенная глубина контроля), где точка перегиба зависимости U f (In ft ) происходит при ft , то необходимо аппроксимировать нелинейные участки зависимости U f (In ft ), Иначе для этого целесообразно использовать выражение вида
U 00+01 (InЛк -0)
где к - показатель степени;
0о , 01 - коэффициенты. Для того, чтобы зависимость U f (In ft ) могла аппроксимироваться выражением (1), она не должна иметь точек перегиба. Для этого после проведения четырех тактов измерения формируют сигналы Pi Ua + - 2Ui
И Р2 U4 + Ui - . ЕСЛИ Р2- Pi О, ТО
изменяют величину ш и соответственно О)2 , (Уз и ед , проводят четыре такта измерения, вновь формируют сигналы Pi и Ра и снова проверяют выполнение условия Pa-Pi 0. Из-за погрешности дискретизации, увеличивающейся по мере различия Ui, U2, Уз и 1/4, реально необходимо выполнение условия
РгР2 Uon,
(2)
где Uon 0.
Частоты У1, шг, шз и ам итерационно изменяют до тех пор, пока не будет выполняться условие (2). Это может быть только в том случае, если Pi О, Р2 О или Р2 0, Pi 0. При изменении величины ш в п раз величина ft изменится в VrT раз, величина In/S изменится на величину±A lnVn, следовательно, величины Pi и Рз пропорциональны величинам вторых производных в соответствующих точках, т.е.
- поэтому
(In/i) 52(ln/)
выполнение условия (2) означает, что при полученных значениях ft сформированная зависимость U f (in ft не имеет точек перегиба, так как в противном случае или Pi О, или Р2з#0, или же величины Pi и Ра имеют разные знаки.
Выполнение условия (2) позволяет так- же исключить измерения на участках, близких к линейным участкам зависимости U f (In/3), например, при слишком больших значениях ft(nfi 4) , при /Ь#/ или при больших значениях величины зазо- ра, так как и в этом случае Р или PzzO. В зависимости от величины п и от необходимой степени удаления рабочего диапазона изменения параметра ft от точки перегиба выбирают значение Ucn.
После выполнения условия (2) зависимость U f (/S) может быть аппроксимирована выражением (1). Покажем возможность аппроксимации реальной зависимости U f (ft выражением (1) на кон- кретном примере. Количественно уравнение (1) задается тремя параметрами 00 , в , и k, поэтому для их нахождения необходимо взять три интерполирующие точки, например ln/8i 1,6, In fti 2,0 и In Д 2.5.
Для различных значений а имеем а 0,3; 1)1 0о + 01 (1,6)k 0,570; 1)2 00 + 0i (2,0)k G,450; 11з в0 +01 (2,5)k 0,340; ,5;Ui 00+01 (1,6)k 0,695; U2 во +01 (2-,0)k 0,615; U3 в0 + 01 (2,5)k 0,530; ,0; Ui 0о+01 (1,6)k 0,840;
U2- 0o +01 (2,0)k 0,810; U3 0o +01 (2,5}k 0,785. Решая раздельно эти системы, получим:
для а 0,3 U -0,8700 + 1,7296 (In ft у0 3899а 0,5 U 1,9750 -1,1266 (In ft )°-2717 ; а 1,0 U 0,6600+ 0,2643 (In/ У0 8171.
Аппроксимирующие кривые, полученные с помощью уравнений (3), изображены на фиг.З пунктирными линиями. Из сравнения реальных зависимостей и аппроксимирующих кривых видно, что в диапазоне интерполяции (1п/3 1,6 - 2,5) отклонения обеих кривых не превышают погрешности графических построений, что свидетельствует о возможности использования выражения (1) для аппроксимации реальной зависимости U f (ft.
Таким образом, после проведения четырех тактов измерения и выполнения условия (2) с учетом (1) имеем ,
Ui 00 +01 ln(/3)k;
1)2 0о +01 ln(/(vrO)k;
U3 0о+01 ln((#(/rO)k;(4)
U4 0o+0i ln(/ n))k.
Используя тождества In xy In x + In y. In у 2 In у, систему уравнения (4) преобразуем к виду
1)1 0o+0i (x)k;
U2 0о + 01 (x + A)k; (5)
U3 00+01 (x-A)k;
1)4 0о+01 (x+ 2A)k. где x пД ;
Л In Vn
ft R a a
где fj - величина удельной электрической проводимости материала изделия.
Используя величины Ui, IJ2, Ua и U4,
.,, U4-Ua
находят величины
Ш-Ui„
М2 -г;- .. , для которых с учетом (5)
справедливы равенства Mt U4-U3 (x+2A)k-(x-A)k
1и2-иГ(x+A)k-xk М2 U4-U1 (x+2A)2-xk()
2U2-Ui (x+A)k-xk () Величины полученных сигналов Mi и М2
уже не зависят от величины коэффициентов 00 и 01 . Если бы величина показателя k была бы известна, то, используя любое из выражений для MI или М2, можно было бы найти селичину х п/3 . Но величина k так же как и 00 и 01 зависит от величины дестабилизирующего фактора (например, выражения (6)), поэтому необходимо в процессе контроля находить реальное значение k.
Если величины х и k рассматривать как неизвестные искомые величины, то на плоскости xk уравнения Fi (x.k.Mi) 0 и Fa (x.k.Ma) 0 задают две кривые, где
(x+2A)k-(x-A)k
(x+A)k-xk ;(7)
(x+2A)k-xk „.
Fi(x,k,Mi)
F2(x.k,M2)YxvA7 ;
Каждое из уравнений (7) и (8) имеет бесконечное множество решений xi, ki, совокупности которых и образуют кривые Fi И Fa на плоскости xk. При реальных значениях 8 . А и k кривые FI и F2 представляют собой
почти прямые линии, пересекающиеся в одной точке, которая является решением уравнения
f (x+2A)k-(x-A)k (x-A)k-xk
Mi)2
+ ::$:i «
Так как истинные (соответствующие действительности) значения хо и ко являются решением и уравнения (7), и уравнения (8), то значение хо и ко единственной точки пересечения кривых FI и Fa является искомым.
Следовательно, решая уравнение (9) относительно величин х и k при полученных значениях величинамi и М2, можно найти величину х In ft (при этом заодно находится величина k, которая в дальнейшем для определения величины о не используется). Найдя, решая (9), величину х In/J с учетом выражения ft R VjMo О , величину удельной электрической проводимости находят в виде
е2х
т Г (Ю)
Fc,
где Цо 4я 10 7 Гн/м - магнитная постоянная;
R - радиус большей обмотки вихретоко- вого преобразователя, м.
В общем случае показатель k не является целым числом, поэтому аналитически выражения (7) и (8) трудно проанализировать. Покажем, что при реальных значениях /J, А их уравнения (7) и (8) практически являются уравнениями двух пересекающихся прямых. Пусть в некоторый момент контроля а 0,5, а параметр х In ft 1,7 (условие (2) выполняется). Согласно (3), для а 0,5 имеем $ 1,9750, 01 1,1266, k - 0,2717. Если п - 1,5, то Д Invfco,2027325, тогда согласно (5) UiA 0,6736841, ,6332342,1),7178168,
1),5958122, a Mi -Ґг-- - 3,
U2 - U1
,9251456 .
Ма фиг.2 изображены две линии FI и FZ, которые задаются соответственно уравнениям (7) и (8) для случая Mi - 3,0161874, .9251456. Каждая из точек хь ki, лежащая на прямой Ft или F2, является одним из многочисленных решений уравнения (7) или (8) соответственно. Из фиг.З видно, что линии FI и FZ пересекаются только в одной точке с координатами хо 1,7, ,ko-0,2717.
Так как уравнение (12) имеет только одно решение и в этой точке значение функции
.(Г«+2ДУ-(х-Дг- м,у +
(x+A)k-xk
. ( ( x+2A)k-xk ... #
+ ( , ,.JkMzf
( х 4- A ) - x
будет минимальное, mln Ф Ф (k0,x0) - О, поэтому уравнение (9) можно решать численными методами.
Покажем на конкретном примере решение уравнения (9) простейшим (но не самым эффективным) методом покоординатного спуска. Он заключается в следующем. Выбирается некоторое начальное приближение XL ki и находится значение функции Ф в этой точке - Ф1 Ф (xi, ki)- Каждому значению xi и ki последовательно дается приращение ± h и находится значение Ф2 Ф (xi + h, ki),
ф3 ф (Х) - н, ki), Ф4 Ф (xi, ki + h), Ф5 - Ф (xi, ki - h). Из величин Ф1 - Фб выбирается минимальная величина Ф и координаты этой точки принимаются за координаты нового приближения - xi, ki. Снова
находятся Oi. Ф2, Фз, Ф4, Ф5 (два из которых будут известны из предыдущего шага), определяется минимальное значение и т.д. Так повторяется до тех пор, пока при выбранном шаге h удается минимизировать
величину Ф. Если величину Ф не удается минимизировать, т.е. если Ф1 - минимальное значение из величин Ф1 - ФБ, то величину шага h уменьшают (например, в 10 раз) и снова находят Фт, Ф2, Фз, Ф4, Фб и т.д.
Эти операции повторяют до получения необходимой точности вычисления координат точки Хо, ko.
В таблице приведен фрагмент решения уравнения (9) этим методом. Пусть в некоторый момент контроля а 0,5, после выполнения (2) хо In /3 1,7, ko 0,2717. Измерив величины Ui, 1)2, Уз иШ, получим ,0161874, ,9251456. Если предполагаемое значение а отличается от реального на 40%, то
начальное приближение xi In ( ft 1,4 ) ln ( 1,7 1.4 )я#1,9. В качестве начального приближения ki выберем ki 0,5, первоначальную величину шага h 0,25, чтобы через
два шага по координате k не получить k О (при этом знаменатели в выражении (9) будут равны нулю, что недопустимо), незначительно изменим величину ki, взяв ki 0,501. Из первой строчки таблицы видно, что минимальным из Ф1 - Фв является ФБ, поэтому в качестве новой координаты выбирается xi 1.9, ki 0,501 - 0,25 0.251. Как видно из таблицы, величины xi и ki приближаются к искомым х0 1,7, k0 0,2717.
Необходимо отметить, что при k 1 уравнение (9) не решается, так как при k 1 в уравнении (9) величины х взаимно сокращаются. Однако выполнение условия (2) позволяет исключить измерения при линейной зависимости U f (In/8 ), когда k 1.
Устройство, реализующее способ, работает следующим образом.
Оператор устанавливает вихретоковый преобразователь 7 на контролируемое изделие. С помощью генераторов 1-4 через коммутатор 6 вихретоковый преобразователь 7 последовательно возбуждают токами с частотами о), ati, шз и ом соответственно. Величины частот , ui, Шз и ац зависят от величины управляющего сигнала с блока 5 управления, который в одном из вариантов представляет собой регулируемый источник опорного напряжения, а гене- раторы 1 - 4 представляют собой электронно-перестраиваемые генераторы. Выходной сигнал U вихретокового преобразователя 7 усиливается усилителем 8, а из усиленного сигнала с помощью амплитудного детектора 9 выделяется амплитудное значение. Генератор 11 тактовых импульсов управляет работой коммутаторов 6 и 10 таким образом, что в блоки 12-15 памяти заносятся величины сигналов Ui при возбуждении его токами с частотой 0)1, G)i, УЗ и CU4 соответственно. Таким образом, в блоках 12-15 памяти хранятся величины Us, Ui, U2 и 1)4 соответственно.
В блоках 16 и 17 вычитания формируются сигналы Pi IJ2 + Уз - 2Ui и P2 U4 + Ui-2lJ2соответственно. Сигналы PI и Ра поступают на входы блока 12 умножения, с выхода которого сигнал Pa Pi поступает на вход компаратора 19, на второй вход которого поступает сигнал с источника 21 опорного напряжения, численно равный величине Don. Если Pa Pi Uon, т.е. условие (2) выполняется, то на выходе компаратора 19 появляется сигнал и сработает блок 20 световой индикации. Если блок 20 не вырабатывает сигнал, то оператор, изменяя величину сигнала с блока 5 управления(при этом изменяются величины ал , yz, сиз и ом), добивается срабатывания блока 20 световой индикации. После этого оператор сбрасывает показания счетчика 26 (если до этого в нем хранилась информация) и запускает одновибратор, который выдает сигнал определенной длительности, поступающий на разрешающий счет вход счетчика 26. На его второй вход с генератора 1 поступает сигнал с частотой Ш1 .
Таким образом, по окончании счета в счетчике 26 хранится значение величины coi в цифровом коде.
Сигналы Us, Ui, Jz и 1М с блоков 12 - 15
5 памяти последовательно поступают через коммутатор 22 на вход аналого-цифрового преобразователя 23 (АЦП 23). После занесения информации о величине ю в счетчик 26 оператор запускает вычислительный
0 блок 24. Информация в вычислительный блок 24 может вводиться только после поступления сигнала на разрешающий вход блока 24 с выхода компаратора 19, что предотвращает ввод информации при невыпол5 нении условия (2). После пуска вычислительного блока 24 информация о величине поступает с выходов счетчика 26 в вычислительный блок 24, а после этого с помощью коммутатора 22 и АЦП 23 по ко0 мандам с вычислительного блока 24 информация о величинах Ui, Ua, Us и U4 последовательно вводится в вычислительный блок 24.
Вычислительный блок 24 вычисляет ве5 личины Mi и М2, решает уравнение (12) по одному из алгоритмов (4), определяет величину 7 по формуле (13) и выводит ее значение на индикатор, входящий в состав вычислительного блока 24. В зависимости
0 от условий и вида контроля вычислительный блок 24 либо непрерывно обрабатывает ин- ( формацию (Ui, U2, Us, U4), либо работает в ждущем режиме, в последнем случае оператор каждый раз после перестановки В7П 7
5 запускает заново вычислительный блок,
Информация о величинах R , А и
7
/ o 4jr-10 н/м может храниться или в постоянном запоминающем устройст-) ве вычислительного блока 24, или вводится в него оператором перед началом работы. Получаемая дополнительно в ходе вычислений величина k может использоваться для оценки достоверности контроля.
5 Формула изобретен и я
Способ вихретокового контроля, заключающийся в том, что в контролируемом изделии с помощью вихретокового преобразователя возбуждают вихревые тоQ ки и измеряют напряжения Ui, U2, Us и Щ в четырех тактах измерения, в первом такте вихретоковый преобразователь питают током с частотой , во втором такте - током с частотой п , в третьем такте 5 током с частотой сиз ( , формируют сигнал PI U2 + Us - 2Ui, итерационно изменяют частоты , ад и соз до выполнения заданного соотношения выходных сигналов вихретокового преобразователя, измеренных в каждом такте измерения, и
определяют измеряемый параметр с учетом совокупности значений Ui, Ua, Уз и U4 и значения п, отличающийся тем, что, с целью повышения точности контроля, в четвертом такте измерения вихретоковый преобразователь возбуждают током с частотой ом п2 , формируют сигнал Р2 Lto + Ui - 2U2, итерационное изменение частот , ад , Шз и ом проводят до выполнения условия Pr PZ 0 и определяют величину удельной электрической проводимости а по формуле
.2
О -
0
R ц0а)
где R - радиус большей обмотки вихретоко- вого преобразователя;
fi0 магнитная постоянная; х и k - пара корней уравнения , (x+2A)k-(x-A)k LM -U3 д. 1 (x + A)k-xkU2- Г
(x+2A)k-xk U4 (x+A)k-xk
+
Ui
- IN u
U2-Ui
Д In VrT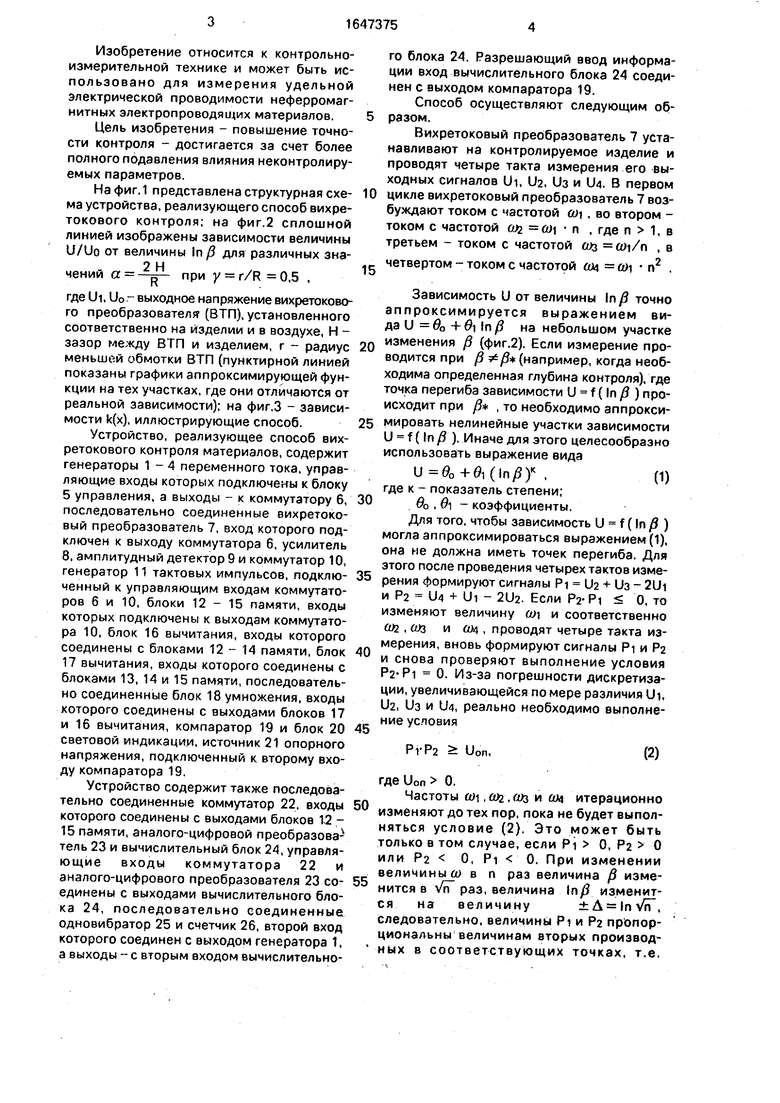
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения величины удельной электрической проводимости электропроводящих изделий | 1989 |
|
SU1666972A2 |
| Устройство для измерения величины удельной электрической проводимости электропроводящих изделий | 1988 |
|
SU1583828A1 |
| Способ вихретокового контроля неферромагнитных изделий | 1987 |
|
SU1446548A1 |
| Устройство для измерения относительной величины удельной электрической проводимости материалов | 1988 |
|
SU1583829A2 |
| Способ калибровки синфазно-квадратурного преобразователя | 1989 |
|
SU1677682A1 |
| Способ определения акустических характеристик нитевидных объектов | 1991 |
|
SU1798678A1 |
| Способ вихретокового измерения параметров электропроводящих изделий | 1989 |
|
SU1689753A1 |
| Способ определения коэффициента затухания ультразвука | 1991 |
|
SU1820229A1 |
| Способ образования функций вида y=A ln (x1/x2) и устройство для его осуществления | 1957 |
|
SU120347A1 |
| Способ определения коэффициента мощности | 1989 |
|
SU1679401A1 |
Изобретение относится к неразрушающему контролю и может быть использовано для измерения удельной электрической проводимости. Цель изобретения - повышение точности контроля. Это достигается за счет более полного подавления влияния неконтролируемых параметров. С помощью генераторов 1, 2, 3 и 4 через коммутатор 6 вихретоковый преобразователь 7 последовательно возбуждают токами с частотами , , саз и п UM ft)i п . Соответствующие напряжения Ui, , Ua и LM, вносимые в вихретоковый преобразователь 7, заносятся в блоки 12, 13, 14 и 15 памяти. В блоках 16 и 17 вычитания формируются сигналы Pi U2 + + Уз - 2Ui и Р2 U4 + Ui - 2Ua. На выходе блока 18 умножения формируется произведение Pi Ра, а частота wi регулируется до выполнения условия Pi Р2 0. Полученная величина ей заносится в счетчик 26, запускается вычислительный блок 24 и определяется величина удельной электрической проводимости. 3 ил.. 1 табл. ч ч Ё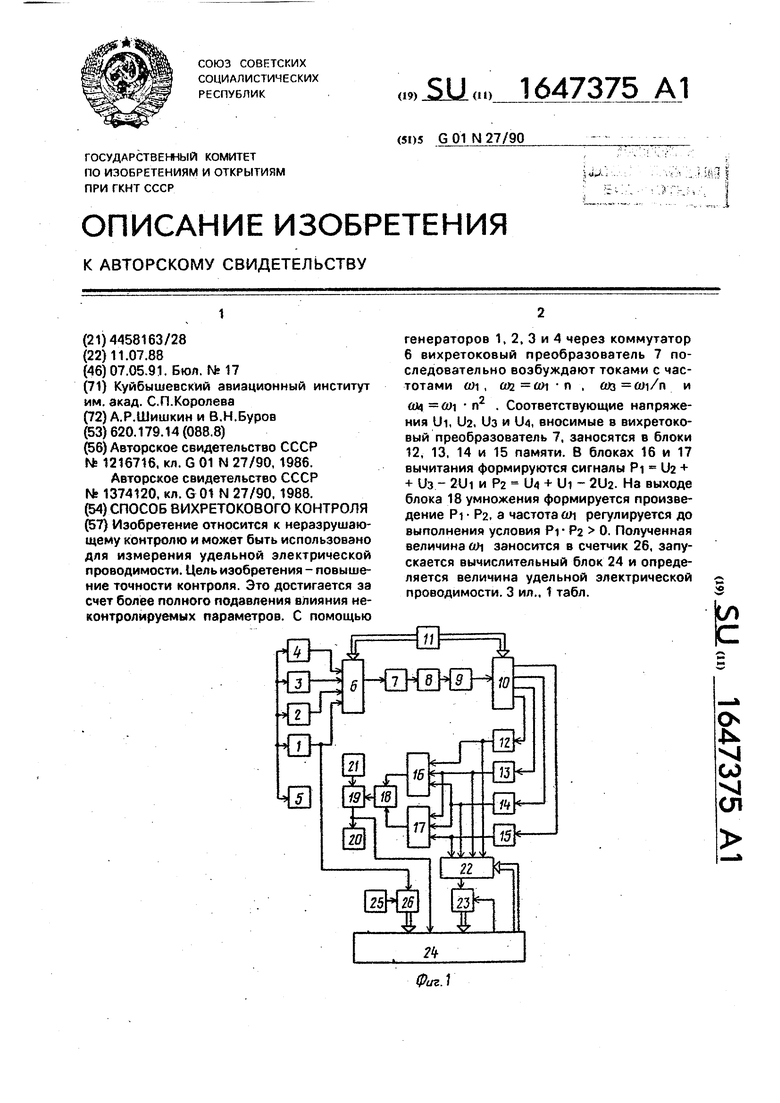
to
tf. 2,0 Фиг. 2
2,5 Ln/i
1,5 . 1,6 Х0 1tff 1,9 X tore. 3
| Электромагнитный способ измерения удельной электрической проводимости неферромагнитных проводящих изделий | 1983 |
|
SU1216716A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения относительной величины удельной электрической проводимости электропроводящих изделий и устройство для его осуществления | 1986 |
|
SU1374120A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
