Изобретение относится к контрольно- измерительной технике и может быть использовано в оптике и других отраслях техники для контроля параметров шероховатости.
Целью изобретения является повышение точности и производительности определения параметров за счет непосредственного измерения интенсивности падающего излучения и автоматизации процесса измерений и обработки полученной информации.
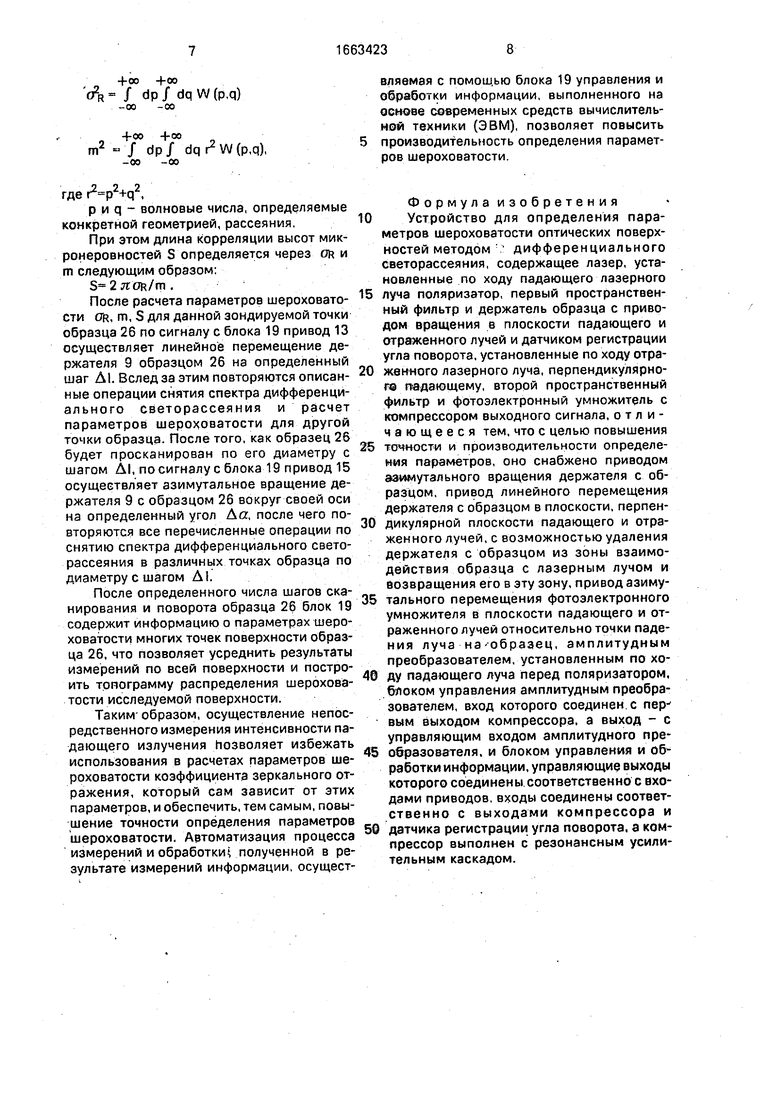
На фиг. 1 представлена структурная схема устройства; на фиг.2 - структурная схема компрессора выходного сигнала фотоэлектронного умножителя.
Устройство содержит (фиг,1) лазер 1 с подключенным к нему блоком 2 питания и цепью стабилизации мощности лазера 1, выполненной, например, в виде светоделителя 3, установленного по ходу лазерного луча, и последовательно соединенных фотодатчика 4, установленного походу отклоненного светоделителем 3 луча, и блока 5 стабилизации мощности лазера, выходом подключенного к управляющему входу 2 блока питания, установленные по ходу падающего лазерного луча амплитудный преобразователь 6, поляризатор 7, первый пространственный фильтр 8 и держатель 9 образца, установленные по ходу отраженного (от образца) лазерного луча, перпендикулярно падающему, второй про- странственны й фильтр 10 и фотоэлектронный умножитель (ФЭУ) 11, компрессор 12 выходного сигнала ФЭУ, вход которого соединен с выходом ФЭУ 11, блок 13 управления амплитудным преобразователем, вход которого соединен с первым выходом компрессора 12, а выход - с управляющим входом амплитудного преобразователя 6, привод 14 вращения держателя с образцом в плоскости падающего и отраженного лучей,
привод 15 азимутального вращения держателя с образцом, привод 16 линейного перемещения держателя с образцом, привод 17 азимутального перемещения ФЭУ, датчик 18 регистрации угла поворота держателя с образцом в плоскости падающего и отраженного лучей и блок 19 управления и обработки информации, входы которого соединены соответственно с выходами компрессора 12 и датчика 18, а управляющие
выходы соединены соответственно с входами приводов 14-17.
Держатель 9 образца установлен с возможностью вращения в плоскости падающего и отраженного лучей, азимутального
вращения и линейного перемещения в плоскости, перпендикулярной плоскости падающего и отраженного лучей, и кинематически связан с приводами 14, 15 и 16, которые предназначены соответственно для
осуществления указанных вращательных и линейного перемещений. Второй пространственный фильтр 10 и ФЭУ 11 установлены с возможностью азимутального перемещения в плоскости падающего и отраженного
лучей на угол 90° относительно точки падения луча на образец до расположения их вдоль оси падающего луча, для осуществления которого предназначен привод 17. Держатель 9 предназначен для закрепления
на нем образца таким образом, чтобы исследуемая поверхность образца была расположена в плоскости, перпендикулярной плоскрсти падающего и отраженного лучей, а кинематические связи держателя 9 с приводами 14,15 и 16 выполнены с обеспечением сохранения расположения исслецуе ои поверхности (образца) в указанной плоскости в процессе всех перемещений.
Привод 16 выполнен так, чтобы обеспечиваемый им диапазон линейных перемеще- ний был достаточным для полного удаления держателя 9 с образцом из зоны взаимодействия образца с лазерным лучом и возвращения его в эту зону.
Компрессор 12 выходного сигнала ФЗУ (фиг.2) состоит из последовательно соединенных повторителя 20 выходного сигнала ФЭУ, входом соединенного с выходом ФЭУ 11, и резонансного усилительного каскада 21, последовательно соединенных регулируемого источника 22 напряжения смещения, входом соединенного с выходом каскада 21, входного резистора 23 источника питания ФЭУ и высоковольтного управляемого источника 24 питания ФЭУ, выходом соединенного с анодом ФЭУ 11 и нагрузочного резистора 25, подключенного к выходу ФЭУ 11.
Исследуемый образец обозначен позицией 26.
Устройство работает следующим образом (фиг.1).
Часть излучения лазера 1 отклонена светоделителем 3 на фотодатчик 4. напряжение с которого подается на блок 5 стабилизации мощности лазера. Управляющий сигнал с блока 5 стабилизации мощности поступает на управляющий вход блока питания лазера 1.
Часть излучения, прошедшая светоделитель 3 в направлении оси лазера 1 (падающий луч), пройдя последовательно через амплитудный преобразователь 6, поляризатор 7, первый пространственный фильтр 8, падает под углом Опар, на образец 26, укрепленный в держателе 9. Часть отраженного излучения, проходя через второй пространственный фильтр 10, регистрируется ФЭУ 11, при этом сумма углов ©per регистрации излучения и ©лад падения постоянна и равна 90°. Напряжение с ФЭУ 11 (с нагрузочного резистора 25, фиг.2) поступает на компрессор 12 выходного сигнала ФЭУ и далее на вход блока 19 управления и обработки информации и вход блока 13 управления амплитудным преобразователем. По сигналу с блока 19 управления и обработки информации привод 14 осуществляет непрерывное вращение держателя 9 с образцом 26 в плоскости падающего и отраженного лучей до регистрации максимальной интенсивности отраженного излучения (зеркально отраженного луча). При этом датчик 18 фиксирует угол поворота образца 26,
а компогссор 12 выходною ФЭУ подав ма анод ФЭУ 11 мимгмапьнсе рабочее напряжение. В этом положении угол регистрации изучения р&рен углу тдснг.я: 0рзг ©ла,л 45
По сигналу с блока 19 привод 14 поворачивает держатель 9 с образцом 26 в обратном направлении i а 5 (в этом положении ут/регистрации Орег ркгаен 90°).
Затем с блока 19 поступаю, управляющие сигналь, по которым привод 14, осуществляет дискретное вращение держателя 9 с образцом 26 на заданный угол Отсчет угла производится датчиком 18 регистрации угла
поворота образца 25 С каждом дискретном положении образца 26 интенсивность дифф зно-отоаже.нной компоненты излучения, соответствующей углу ©per, регистрируется ФЭУ 11 и соответствующая
информация через компрессор 12 поступает в блок 19. Деожатель 9 с образцом 26 поворачивается на 90°, п результате чего снимается полный спектр дифференциального светорассеяния, данные о котором заносятся в блок 19. При этом компрессор 12 меняет по определенному закону напрчже- ние на аноде ФЭУ 11 в зависимости от интенсивности регистрируемого излучения, а блок 13 управлении амплитуды преобразователем BL|дает управляющий сигнал на амплитудный поеобразоватепь 6, в результате чего происходит выделение полезного сигнала. После снятия спектра дифференциального светорассеяния по сигналу с блока
19 привод 16 осуществляет линейное перемещение держателя 9 с образцом 26 до полного их удаления из зоны взаимодействия образца 26 с лазерным излучением, а привод 17 производит азимутальный разворот
второго просрансгвенного фильтра 10 и ФЭУ 11 в плоскости падающего и отраженного лучей на 90° относительно точки падения луча на образец 26 до расположения их вдоль оси падающего луча для осуществления прямого измерения интенсивности падающего излучения.
По зависимости интенсивности диф. диффузно-отраженного излучения от угла поворота ©per образца 26 и интенсивности
падающего излучения 1п, в блоке 19 рассчитывается энергетическая спектральная плот- носить шероховатости W(p, q}. которая несет в себе информацию о статистических свойствах исследуемой шероховатости поверхности образца 26, пои этом среднеквадратичное отклонение профиля поверхности OR и среднеквадратичный наклон граней поверхности m определяются путем интегрирования функции W(p, q).
-4-00 +00
VR - / dp / dq W (p.q)
-00 -00
-foo +00 nr - / dp / dq r2 W (p,q),
-00 -00
где ,
p и q - волновые числа, определяемые конкретной геометрией, рассеяния.
При этом длина корреляции высот микронеровностей S определяется через Ой и m следующим образом:
уток/т .
После расчета параметров шероховатости OR, m, S для данной зондируемой точки образца 26 по сигналу с блока 19 привод 13 осуществляет линейное перемещение держателя Э образцом 26 на определенный шаг Д1. Вслед за этим повторяются описанные операции снятия спектра дифференци- ального светорассеяния и расчет параметров шероховатости для другой точки образца. После того, как образец 26 будет просканирован по его диаметру с шагом Д|, по сигналу с блока 19 привод 15 осуществляет азимутальное вращение держателя 9 с образцом 26 вокруг своей оси на определенный угол До:, после чего повторяются все перечисленные операции по снятию спектра дифференциального светорассеяния в различных точках образца по диаметру с шагом Д1.
После определенного числа шагов сканирования и поворота образца 26 блок 19 содержит информацию о параметрах шероховатости многих точек поверхности образца 26, что позволяет усреднить результаты измерений по всей поверхности и построить топограмму распределения шероховатости исследуемой поверхности.
Таким- образом, осуществление непосредственного измерения интенсивности падающего излучения Позволяет избежать использования в расчетах параметров шероховатости коэффициента зеркального отражения, который сам зависит от этих параметров, и обеспечить, тем самым, повышение точности определения параметров шероховатости. Автоматизация процесса измерений и обработки полученной в результате измерений информации, осуществляемая с помощью блока 19 управления и обработки информации, выполненного на основе современных средств вычислительной техники (ЭВМ), позволяет повысить производительность определения параметров шероховатости.
Ф о р м у л а и з о б р е т е н и я
Устройство для определения параметров шероховатости оптических поверхностей методом дифференциального светорассеяния, содержащее лазер, установленные по ходу падающего лазерного
луча поляризатор, первый пространственный фильтр и держатель образца с приводом вращения в плоскости падающего и отраженного лучей и датчиком регистрации угла поворота, установленные по ходу отраженного лазерного луча, перпендикулярного падающему, второй пространственный фильтр и фотоэлектронный умножитель с компрессором выходного сигнала, отличающееся тем, что с целью повышения
точности и производительности определения параметров, оно снабжено приводом азимутального вращения держателя с образцом, привод линейного перемещения держателя с образцом в плоскости, перпендикулярной плоскости падающего и отраженного лучей, с возможностью удаления держателя с образцом из зоны взаимодействия образца с лазерным лучом и возвращения его в эту зону, привод азимутального перемещения фотоэлектронного умножителя в плоскости падающего и отраженного лучей относительно точки падения луча на-образец, амплитудным преобразователем, установленным по ходу падающего луча перед поляризатором, блоком управления амплитудным преобразователем, вход которого соединен с пер вым выходом компрессора, а выход - с управляющим входом амплитудного преобразователя, и блоком управления и обработки информации, управляющие выходы которого соединены соответственно с входами приводов, входы соединены соответственно с выходами компрессора и
датчика регистрации угла поворота, а компрессор выполнен с резонансным усилительным каскадом.
/7
21
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХФОТОННЫЙ СКАНИРУЮЩИЙ МИКРОСКОП | 2011 |
|
RU2472118C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МИКРОРЕЛЬЕФА ПОВЕРХНОСТИ ИНТЕРФЕРЕНЦИОННЫМ МЕТОДОМ | 2007 |
|
RU2373494C2 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| СПОСОБ КОНТРОЛЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ НА ОСНОВЕ ЭФФЕКТА ФОТОЛЮМИНЕСЦЕНЦИИ ЧАСТИЦ НАНОРАЗМЕРНОГО УРОВНЯ | 2007 |
|
RU2374607C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ДРАГОЦЕННЫХ КАМНЕЙ В СОСТАВЕ ЮВЕЛИРНЫХ ИЗДЕЛИЙ | 2021 |
|
RU2765213C1 |
| Способ двухлучевых термолинзовых измерений с одновременной регистрацией пропускания испытуемого образца | 2016 |
|
RU2659327C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ | 2005 |
|
RU2301400C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕФЕКТОВ В ОБЪЕМЕ ОБРАЗЦА ДИЭЛЕКТРИКА ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2671150C1 |
| СПОСОБ КОНТРОЛЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ НА ОСНОВЕ ЭФФЕКТА ГЕНЕРАЦИИ ОТРАЖЕННОЙ ГИГАНТСКОЙ ВТОРОЙ ГАРМОНИКИ | 2009 |
|
RU2421688C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является повышение точности и производительности определения параметров за счет непосредственного измерения интенсивности падающего излучения, автоматизации процесса измерений и обработки полученной информации. Путем дискретного вращения образца 26, расположенного по ходу зондирующего излучения лазера 1, осуществляемого в плоскости падающего и отраженного от поверхности образца 26 лучей, и фиксации интенсивности диффузно-отраженной компоненты излучения фотоэлектронным умножителем /ФЭУ/ 11 снимается спектр дифференциального светорассеяния, информация о котором поступает в блок 19 управления и обработки информации. Затем образец 26 удаляется из зоны взаимодействия с излучением, а по ходу падающего излучения устанавливается ФЭУ 11, который непосредственно измеряет интенсивность падающего излучения. По зависимости интенсивности диффузно-отраженного излучения от угла поворота образца 26 и интенсивности падающего излучения рассчитывается энергетическая спектральная плотность шероховатости, которая несет информацию о статических свойствах исследуемой поверхности образца 26 и используется для расчета с помощью известных соотношений параметров шероховатости. Образец 26 возвращается на прежнюю позицию, осуществляется последовательное сканирование его поверхности с заданным шагом по диаметру и по углу. В каждой фиксированной точке образца 26 повторяются все операции по снятию спектра дифференциального светорассеяния. Полученные результаты усредняются по всей исследуемой поверхности. Манипуляции с образцом 26 и ФЭУ 11 осуществляются с помощью соответствующих приводов 14, 15, 16 и 17. Управление процессом измерений и обработка полученных данных осуществляются автоматически блоком 19 управления и обработки информации, выполненным на основе ЭВМ. Непосредственное измерение интенсивности падающего излучения позволяет исключить использование в расчетах коэффициента зеркального отражения, зависящего от параметров шероховатости, и повысить точность их определения. Автоматизация процессов измерения и расчета параметров шероховатости повышает производительность определения этих параметров. 2 ил.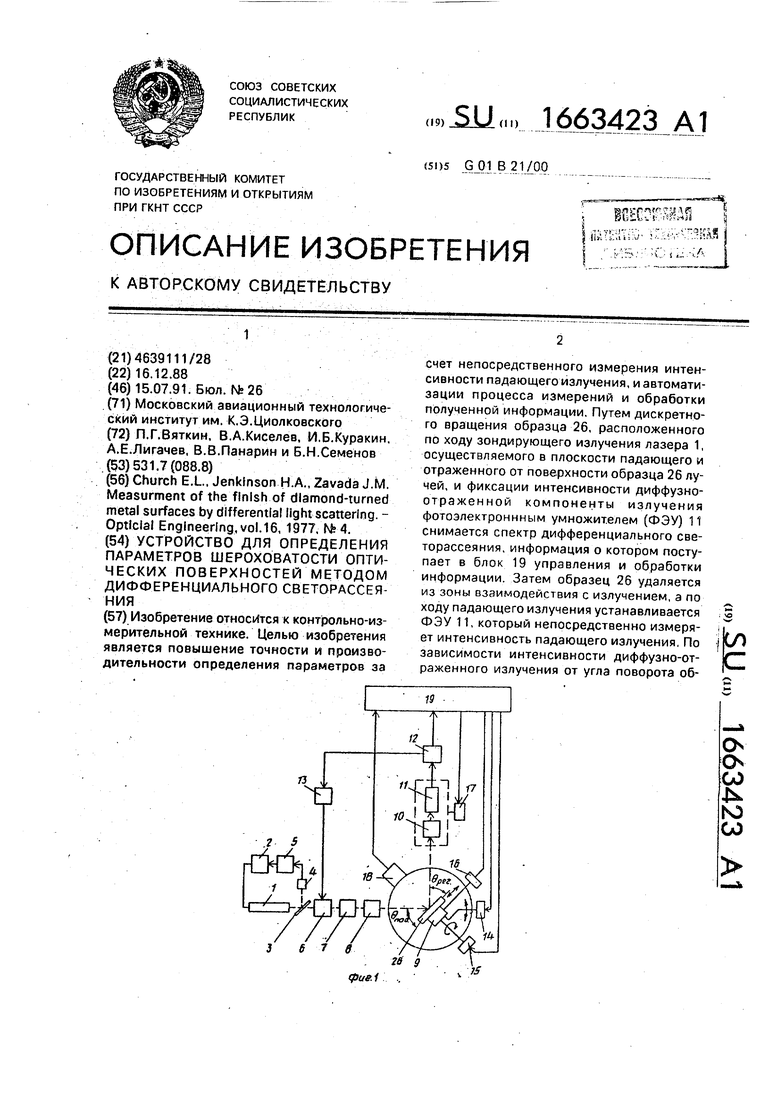
-о гч
13
-CZh
t±
х1
22
№f
Фиг. 2
| Church E.L, Jenkfnson НА, Zavada J.M | |||
| Measurment of the finish of diamond-turned metal surfaces by differential light scattering | |||
| - Optlcial Engineering, vol | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
