Изобретение относится к гидромеханизации и предназначено для подводной разработки грунта.
Цель изобретения - повышение маневренности землесосного снаряда
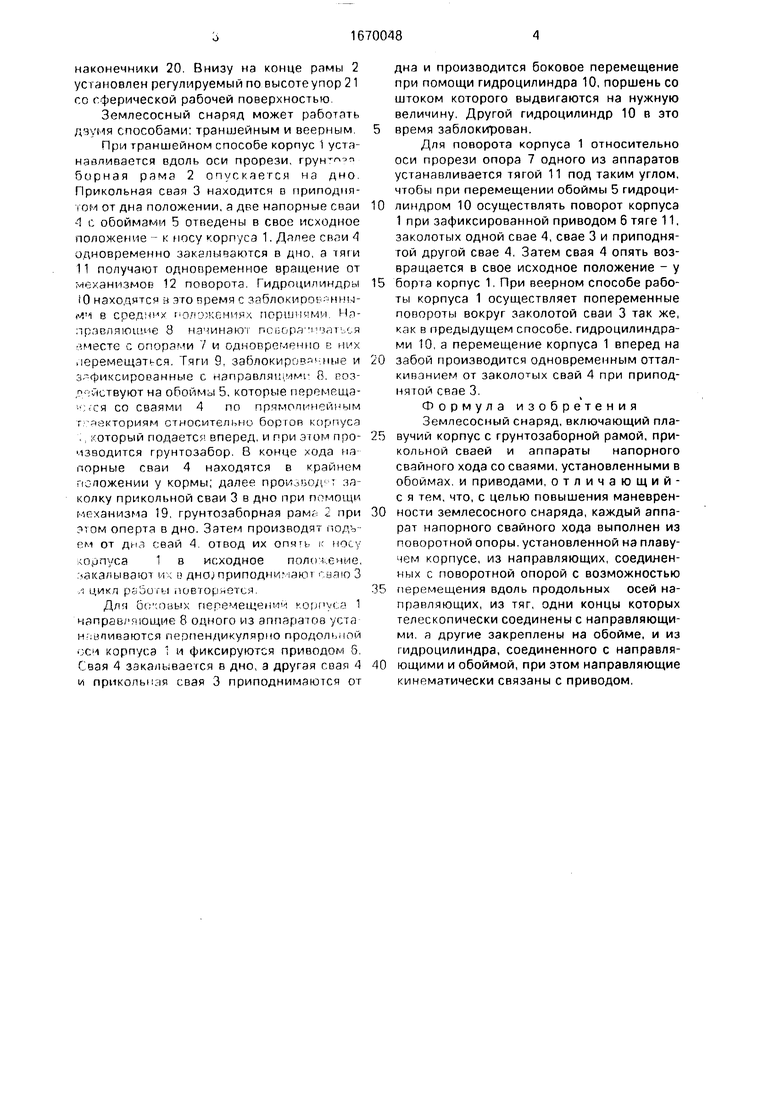
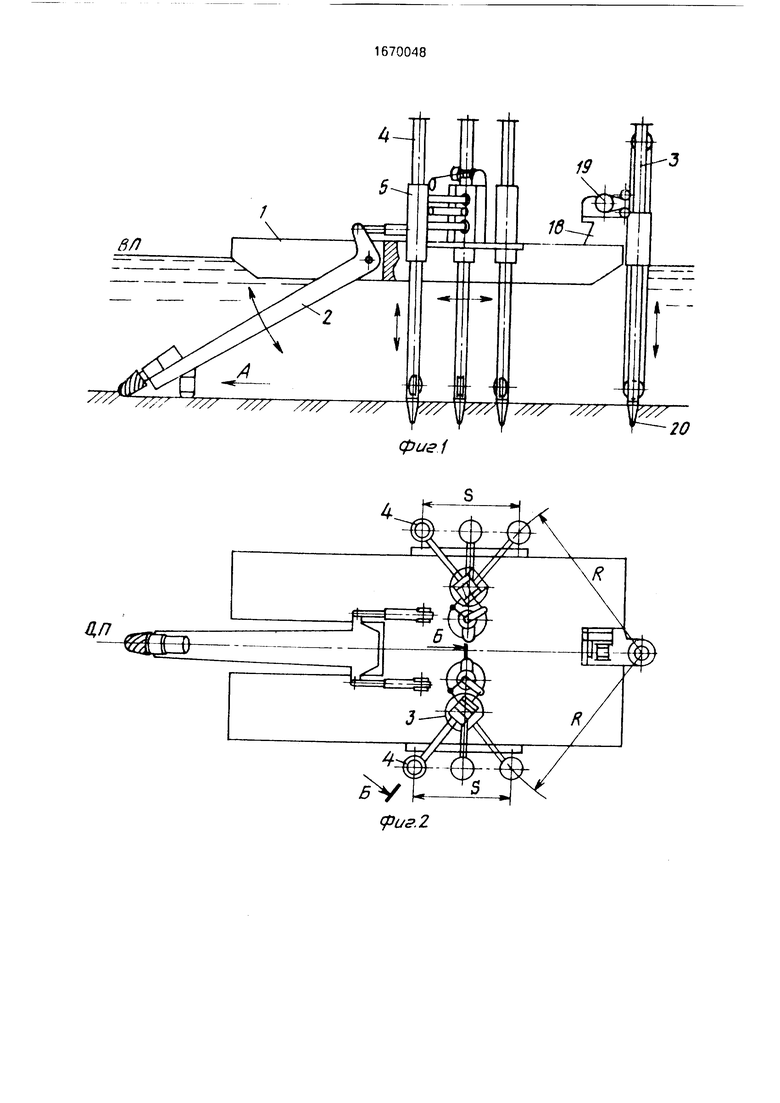
На фиг. 1 изображен землесосный снаряд, вид сбоку; на фиг 2 - то же, вид сверху, на фиг. 3 - вид А на фиг. 1, на фиг. 4 - схема аппарата напорного свайного хода; на фиг 5 - разрез Б-Б на фиг. 2.
Землесосный снаряд включает плавучий корпус 1 с грунтозаборной рамой 2, прикольной сваей 3 и аппаратами напорного свайного хода, установленными по бортам корпуса 1.Каждый аппарат напорного свайного хода содержит сваю 4, установленную в обойме 5, привод 6, поворотную опору 7, установленную на плавучем корпусе 1, направляющие 8, соединенные с поворотной опорой 7 с возможностью перемещения вдоль продольных осей направляющих 8,
тяги 9, одни концы которых телескопически соединены с направляющими 8, а другие закреплены на обойме 5, и гидроцилиндр 10, соединенный с направляющими 8 и обоймой 5. Направляющие 8 кинематически связаны с приводом 6 с помощью тяги 11 и механизма 12 ее поворота Тяга 11 шарнирно соединена со стойкой 13.
На верхней площадке опоры 7 установлен тросовый механизм 14 подъема (и опускания) сваи 4 с приводом 15. Обе направляющие 8 параллельны между собой. На нижнем направляющей 8 закреплен ролик 16 с горизонтальной осью вращения, а на нижней части обоймы 5 закреплен ролик 17 с вертикальной осью вращения.
Прикольная свая 3 расположена на корме корпуса 1 и установлена в обойме неподвижной стойки 18. На корпусе 1 расположен тросовый механизм 19 подъема и опускания сваи 3. Сваи 3 и 4 содержат поворотные
О
VI о о
Јь
00
наконечники 20 Внизу на конце рамы 2 усыновлен регулируемый по еысотеупор 21 го гферической рабочей поверхностью
Землесосный снаряд может работать дчч ия способами траншейным и веерным
При траншейном способе корпус 1 устанавливается вдоль оси прорези грунт борная рама 2 опускается на дно Прикольная свал 3 находится в приподня- ом от дна положении, а две напорные сваи -1 и обоймами 5 отведены в свое исходное положение - к носу корпуса 1 Далее сваи А одновременно закалываются в дно а тяги 11 получают одновременное вращение от механизмов 12 поворота Гидроцилиндры Ю находятся эго премя с T flOKHDOf ннм(VV1 В СпеД Х I nri 1МУЈНИЯ, ПРрШт МЧ Нлючвлчюшие 8 нэшнзю nri ора ч г я месте опорами / и одновррмрнно в нн перемещаться Гяги 9 заЬлокир вя1 ные и 1 фичсированные с направляй ч MI 8 РОТ Л твуют на обоймы 5 которые перпмгщагя со сваями 4 по прямолинейным г -к- кториям относительно борюв корпуса
оторый подается вперед и при этом производится грунтозабор В конце хода на торные сваи 4 находятся в крайнем положении у кормы, далее проищи д за колку прикольной сваи 3 в дно при помощи исламизма 19 грунтозаборная сам, 2 при ом оперта в дно Затем производят подъ °м от днч свай 4 отвод их опчп i HO,V
чОрпуса 1 в исходное положение яка/ ывают и о дно,1 приподш/- яго 3
ЦИКЛ prtoOiM РОВЮриРТС
Длч U( Odbi пегчечещрнч 1 орп 1 направляющие 8 одного из аппаратов уста н впиваются перпендикулярно продольной - ги корпуса 1 и фиксируются приводом 5 Свая 4 зэкальваегся в дно э другая гвая 4 и приколы1ш свая 3 приподнимаются от
дна и производится боковое перемещение при помощи гидроцилиндра 10, поршень со штоком которого выдвигаются на нужную величину Другой гидроцилиндр 10 в это
время заблокирован
Для поворота корпуса 1 относительно оси прорези опора 7 одного из аппаратов устанавливается тягой 11 под таким углом, чтобы при перемещении обоймы 5 гидроцилиндром 10 осуществлять поворот корпуса 1 при зафиксированной приводом 6 тяге 11, заколотых одной свае 4, свае 3 и приподнятой другой свае 4 Затем свая 4 опять возвращается в свое исходное положение - у
борга корпус 1 При веерном способе работы корпуса 1 осуществляет попеременные повороты вокруг заколотой сваи 3 так же, как в предыдущем способе, гидроцилиндрами 10 а перемещение корпуса 1 вперед на
забой производится одновременным отталкиванием от заколотых свай 4 при приподнятой свае 3
Формула изобре тения Землесосный снаряд, включающий плавучий корпус с грунтозаборной рамой, прикольной сваей и аппараты напорного свайного хода со сваями, установленными в обоймах и приводами, отличающий- с я тем, что, с целью повышения маневренности землесосного снаряда, каждый аппарат напорного свайного хода выполнен из поворотной опоры установленной на плаву- ем корпусе, из направляющих, соединенных с поворотной опорой с возможностью
перемещения вдоль продольных осей направляющих, из тяг, одни концы которых телескопически соединены с направляющими а другие закреплены на обойме, и из гидроцилиндра, соединенного с направляющими и обоймой, при этом направляющие кинематически связаны с приводом
| название | год | авторы | номер документа |
|---|---|---|---|
| Землесосный снаряд | 1989 |
|
SU1712545A1 |
| Землесосный снаряд | 1989 |
|
SU1751270A1 |
| Землесосный снаряд | 1989 |
|
SU1728395A1 |
| Земснаряд | 1978 |
|
SU825791A1 |
| Землесосный снаряд | 1976 |
|
SU605006A1 |
| УСТРОЙСТВО ДЛЯ ЗАБОРА ШЛАМА ИЗ ОТСТОЙНИКОВ | 1994 |
|
RU2117730C1 |
| Землесосный снаряд | 1972 |
|
SU574506A1 |
| Землесосный снаряд | 1984 |
|
SU1145094A1 |
| ДНООЧИСТИТЕЛЬНЫЙ СНАРЯД | 1993 |
|
RU2054504C1 |
| Землесосный снаряд | 1978 |
|
SU866061A1 |

Изобретение относится к гидромеханизации и предназначено для подводной разработки грунта. Цель - повышение маневренности землесосного снаряда. Землесосный снаряд включает плавучий корпус 1 с грунтозаборной рамой, прикольной сваей и аппаратами напорного свайного хода. Каждый аппарат содержит сваю 4, установленную в обойме 5, привод 6, поворотную опору 7, направляющие 8, тяги 9 и гидроцилиндр 10. Поворотная опора 7 установлена на плавучем корпусе 1. Направляющие 8 соединены с поворотной опорой 7 с возможностью перемещения вдоль продольных осей направляющих 8. Одни концы тяг 9 телескопически соединены с направляющими 8, а другие закреплены на обойме 5. Гидроцилиндр 10 соединен с направляющими 8 и обоймой 5. Направляющие 8 кинематически связаны с приводом 6. Сваи 4 одновременно закалывают в дно. Направляющие 8 поворачивают вместе с опорами 7 и одновременно в них перемещаются. Плавучий корпус 1 подается вперед. 5 ил.
}глф
01
8K)GZ.9l
Вид А
/7Л 7/// //
(риг.З
$ (полный ход
Фиг Л
21
борт
Траектория /гере- мещенил связи.
11
б-Б
20
Фиг 5
У
| Двузеркальный эккер | 1925 |
|
SU1416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
