Изобретение относится к измерительной технике и может быть использовано при контроле качества изготовления магнитомеханических газоанализаторов либо при их наладке.
Цель изобретения - повышение достоверности.
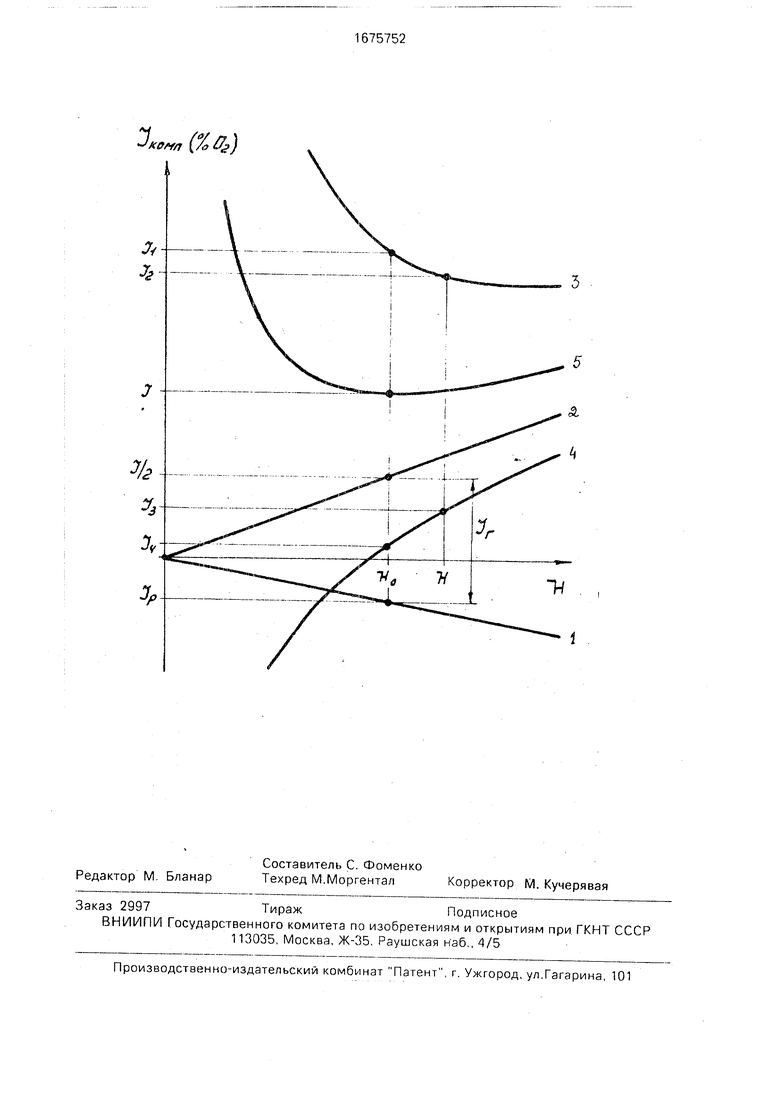
На чертеже представлены графики зависимости выходного сигнала тока компенсации комп магнитомеханического компенсационного газоанализатора от напряженности магнитного поля Н в зазорах газоанализатора при различных механических моментах сил, действующих на ротор.
Исходное магнитное поле Нов зазорах газоанализатора при реализации способа меняется до величины Н.
График 1 отображает зависимость тока компенсации от магнитного поля при нулевом механическом моменте сил и нулевой магнитной восприимчивости окружающего ротор газа, график 2 - то же, но при реальном газе, график 3 - при исходном механическом моменте сил, действующем на ротор газоанализатора, и при реальном газе, график 4 - при создании дополнительного механического момента сил при реализации заявленного способа, график 5 - при механическом моменте сил, обеспечивающем экстремальное значение тока компенсации по магнитному полю при его значении Н0. Измерительная камера магнитомеханического компенсационного газоанализатора представляет собой крутильные весы (гантелеобразный ротор, подвешенный на токопроводящих растяжках), помещенные в неоднородное магнитное поле. Датчик угла поворота ротора (например, оптоэлектрон- ный преобразователь) вырабатывает знакопеременный сигнал 11д в зависимости от отклонения ротора от исходного положения
сл
с
Os
xj СЛ vj СЛ
го
(- р0 +1 (МуQ (М -Мкомл+Мдоп), (1)
где Копт - коэффициент передачи угла поворота ротора в электрический сигнал Уд
ро - угол поворота ротора, при котором работает газоанализатор,относительно его ненагруженного состояния;
Q - жесткость растяжки, определяющая угол поворота ротора под действием суммарного момента сил: М -Мкомп+Мдоп;
Му- момент сил, обусловленный магнитной восприимчивостью газа и ротора;
Мкомп - момент сил, обусловленный взаимодействием тока компенсации (комп; с магнитным полем;
Мдоп - дополнительный момент сил, действующий на ротор в результате, например, воздействия аэродинамических сил, несбалансированности ротора, находящегося в поле тяжести, инерциальные моменты сил и т.п.
Магнитные моменты сил М и Мкомп определяются по формулам
МэеГ (Kr КР )
Э(Н2) Э р
Vp/io,
(3)
Введя обозначения:
lr HoVp/cr/S;
/c/S;
ех(Мдоп-0 po)
(5)
(6)
где Кг - магнитная восприимчивость единицы объема окружающего ротора газа;
АГр - магнитная восприимчивость единицы объема ротора;
Н - магнитное поле, в котором находится ротор в зависимости от его угла поворота р
Vp - объем ротора;
(Uo-магнитная проницаемость вакуума.
Аналогично
-ч II
Мкомп 2 1КОМП Sf--/4 d f
где комп - ток компенсации газоанализатора;
S - площадь витка компенсационной обмотки.
Следящая схема газоанализатора создает такой ток компенсации 1комп, чтобы ротор оставался в исходном положении, т.е. Уд было равно нулю, а следовательно, исходя из (1), (2), (3), получают
)Н$+Ј§ Ь И,
При изменении магнитного поля в зазорах магнитной системы газоанализатора с величины Н0 до величины Н градиент поля меняется соответственно:
Ш. ±L .
Но
и используя (5), уравнение (4) можно переписать следующим образом:
0
5
0
5
0
5
0
5
0
5
iKOMnCHHIr-lpJjtUlwex- f()
Анализ зависимости (7) позволяет установить, что существует такой 1мех, что:
г d комп (Н) т.
.
При этом
( -I -i р,
(1комп(Н)2(1г-1р)1(8)
где I - ток компенсации, экстремальный по магнитному полю, и становится очевидным, что
IpHr- /2(9)
Способ определения магнитной восприимчивости ротора магнитомеханического компенсационного газоанализатора может осуществляться следующим образом.
В магнитомеханическом компенсационном газоанализаторе измеряют ток компенсации 12. При этом в газовом тракте находится окружающий воздух с заданным значением концентрации кислорода. Измерение тока компенсации осуществляют по выходному сигналу газоанализатора с предварительной установкой электрического смещения так, чтобы нулевой ток компенсации ротора соответствовал нулевому выходному сигналу газоанализатора. Изменение магнитного поля на 3-5% в зазорах магнитной системы производится поднесением магнитного шунта к магнитной системе газоанализатора. Практически оказывается достаточным, чтобы магнитное поле в зазорах газоанализатора изменилось на 1 %. Величина изменения поля в зазорах оказывает влияние лишь на точность измерения магнитной восприимчивости ротора. Производят измерение тока компенсации i описанным способом.
Дополнительный механический момент сил, действующий на ротор, создают поворотом винта котировочного устройства газоанализатора. Сдвиг оптической системы, вызванный поворотом винта, вынуждает следящую схему газоанализатора удерживать ротор в положении, развернутом отно- сительно исходного, а закручивание растяжки, на которой закреплен ротор, и создает дополнительный механический момент сил.
Производят измерение тока компенсации 1з описанным способом.
Восстановление магнитного поля в исходное состояние производят удалением магнитного шунта от магнитной системы.
Производят измерение тока компенсации Ц описанным способом.
Возможен другой вариант реализации способа, согласно которому сначала измерякзт И, далее, подложив калиброванную прокладку под винт юстировочного устройства, создают дополнительный механический момент сил и измеряют М, после этого осуществляют частичное размагничивание магнитного узла, тем самым стабилизируя его, и измеряют з. Вытащив калиброванную прокладку из-под винта юстировочного устройства, возвращают механический момент сил, действующий на ротор, в исходное состояние, послечего измеряют 12. Все остальное при реализации второго варианта совпадает с первым.
Подставляя параметры процессов измерений токов компенсации h-U в изложенном способе в уравнение(7) и используя (9), получают систему четырех уравнений:
Н 12/2 + 1мех1; 12 щ1/2+1мех1 р
ЬН . /г) . IНо ,
-л- 1/2+1мех2 -гр
14 1/2+1мех2,(1°)
где 1мех1 и 1мех2 - токи компенсации двух различных механических моментов. Решая систему (10), находят Н/Н0(1Н4)/(12-1з);(11)
| 2(lil3-l2U)(l2-l3)
(h - 12 +1з - U) (И + 12 - 1з - U)j а магнитную восприимчивость ротора определяют по формуле
(1Н/2).(13)
где г - ток компенсации магнитной восприимчивости окружающего ротор газа, в данном случае воздуха содержащего 2Ч1 % 02,
K S/H0VP - коэффициент пропорциональности.
В приведенном примере реализации способа выходной сигнал газоанализатора отградуирован в объемных долях содержания кислорода, а следовательно, и результат вычисления тока компенсации магнитной восприимчивости ротора выражается эквивалентным содержанием кислорода в газовой среде. Поскольку абсолютная величина магнитной восприимчивости кислорода известна, то становится возможным определить абсолютную величину магнитной восприимчивости ротора. В случае, если, |Н/Н0-11 1,то
I I1I3-I2U H-I2 + I3-U
0
5
0
5
0
5
0
5
0
Таким образом, предлагаемый способ имеет следующие преимущества: осуществляется не разрушающий газоанализатор контроль магнитной восприимчивости ротора; контроль осуществляется в составе газоанализатора после всех свободных операций и поэтому исключает возможность последующего ферромагнитного загрязнения; повышается достоверность контроля, поскольку в процессе измерения ротор находится в таком же распределении магнитных полей, в котором находится рабочий газоанализатор.
Формула изобретения Способ определения магнитной восприимчивости ротора магнитомеханического компенсационного газоанализатора, включающий воздействие на исследуемый ротор неоднородным магнитным полем, отличающийся тем, что, с целью повышения достоверности, для двух значений напряженности неоднородного магнитного поля, воздействующего на ротор газоанализатора, заполненного газом заданного состава, регистрируют соответствующие значения выходного сигнала газоанализатора при воздействии дополнительным механическим моментом на исследуемый ротор и без этого воздействия, а магнитную восприимчивость ротора газоанализатора определяют из следующих выражений:
/cp K(lr-i);
2 (И l3-l2l3)(J2 1з)
К -
(И - l2 +I3 -U)(ll + 12 -13 -U)
S, Но Ур Кг
H0Vp гS
где S - площадь витка компенсационной обмотки газоанализатора;
Vp - обьем ротора газоанализатора;
к - магнитная восприимчивость газа заданного состава;
Но - первое значение напряженности неоднородного магнитного поля;
И, 12 - выходные сигналы газоанализатора при первом и втором значениях напряженности неоднородного магнитного поля в отсутствии воздействия на ротор дополнительным механическим моментом;
1з, 14 - выходные сигналы газоанализатора при втором и первом значениях напряженности неоднородного магнитного поля при воздействии на ротор дополнительным механическим моментом
Jfeetw /о0г)
Я

| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕХАНИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ГАЗОАНАЛИЗАТОР | 1991 |
|
RU2049992C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ГАЗОАНАЛИЗАТОР | 1968 |
|
SU210468A1 |
| Измерительная камера магнитомеханического газоанализатора | 1989 |
|
SU1779987A1 |
| МАГНИТОМЕХАНИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ГАЗОАНАЛИЗАТОР | 1973 |
|
SU382963A1 |
| Магнитомеханический компенсационный газоанализатор | 1985 |
|
SU1363046A1 |
| Магнитомеханический компенсационный газоанализатор | 1984 |
|
SU1241120A1 |
| МАГНИТОМЕХАНИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ГАЗОАНАЛИЗАТОР | 1970 |
|
SU266342A1 |
| Магнитомеханический газоанализатор | 1988 |
|
SU1659835A1 |
| Магнитно-механический компенсационный газоанализатор | 1971 |
|
SU437007A1 |
| Магнитомеханический газоанализатор | 1986 |
|
SU1453305A1 |
Изобретение относится к измерительной технике и может быть использовано при контроле качества магнитомеханических газоанализаторов при их изготовлении либо при их наладке. Целью изобретения является повышение достоверности Предложенный способ обеспечивает следующие преимуществапередизвестным, осуществляется неразрушающий контроль магнитной восприимчивости ротора газоанализатора, контроль осуществляется в составе газоанализатора после всех сборочных операций, что исключает возможность последующего ферромагнитного загрязнения, повышается достоверность контроля, так как в процессе измерения ротор находится в таком же распределении магнитных полей, в котором находится рабочий газоанализатор Последовательность операций, предусмотренных данным способом, приводится в описании изобретения. 1 ил.
| Патент США № 3879658, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
