Изобретение относится к биотехнологии и может быть использовало для автоматического управления полунепрерывным процессом микробиологического синтеза.
Целью изобретения является увеличение выхода целевого продукта за счет повышения эффективности функционирования системы.
,,, ставленная цель достигается использованием в процессе коррекции управления модели со скорректированными значениями параметров на текущем интервале и априорными на последующем, причем корректирующий эффект обеспечивается гарантированно, для чего предварительно определяется наихудшее с точки зрения коррекции управления значение параметров на последующем интервале, оценивается ситуация коррекции и, если гарантированность результата коррекции соблюдается, реализуется скорректированное управление, если нет - реализуется управление, найденное на предыдущем такте. Таким образом, расчет управлении на каждом такте осуществляется по уточненной модели, что обеспечивает повышение эффективности функционирования системы и увеличение выхода целевого продукта.
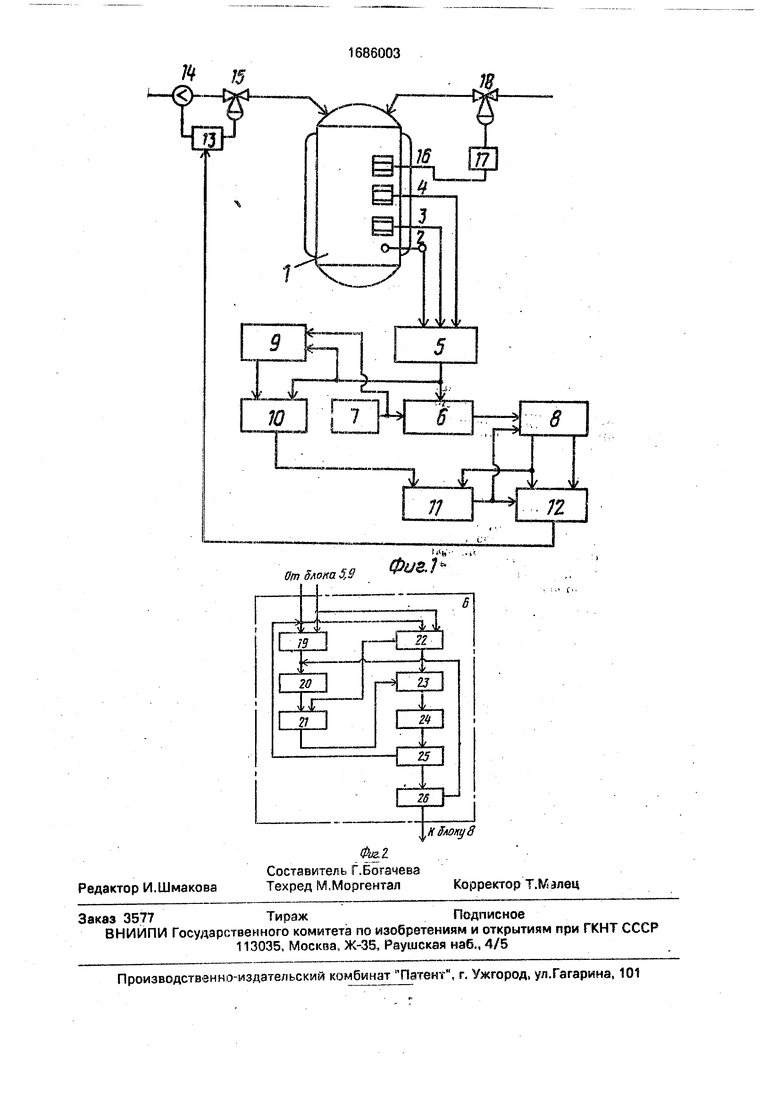
На фиг. 1 представлена схема системы автоматического управления полунепрерывным процессом биосинтеза; на фиг. 2 -о блок гарантированной коррекции.
Система содержит контуры регулирования рН среды и расхода питательного субстрата в ферментере 1, датчик 2 уровня, анализаторы 3 и 4 концентраций питательного субстрата и целевого продукта, подключенные к входу блока 5 реализации адаптивной модели, блок 6 коррекции, пер- оый вход которого подключен к выходу блока 5 реализации адаптивной модели, второй вход - к выходу блока 7 постоянной памяти, з выход - к первому входу блока 8 оперативной памяти, первый логический блоч 9, первый вход которого соединен с выходом блока 5 реализации адаптивной модели, второй вход - с выходом блока 7 постоянной памяти, а выход подключен к первому входу
v
И
О 00
о о о
00
блока 10 гарантированной коррекции, второй вход которого соединен с выходом блока 5 реализации адаптивной модели, выход - соединен с первым входом второго логического блока 11, второй вход которого соеди- нен с первым выходом блока 8 оперативной памяти, блок переключающего реле 12, первый вход которого соединен с первым выходом блока 8 оперативной памяти, второй вход - с вторым выходом лока 8 оператив- ной памяти и вторым входом второго логического блока 11, третий вход - с выходом второго логического блока 11 и вторым входом блока 8 оперативной памяти, а выход соединен с заданием регулятора 13 расхода питательного субстрата.
Контур регулирования расхода питательного субстрата состоит из датчика 14 расхода, выход которого подключен к входу регулятора 13 расхода питательного суб- страта, связанного с исполнительным механизмом 15, установленным на линии подачи субстрата.
Контур регулирования рН среды состо- итиз датчика рН 16, выход которого подклю- чен к входу регулятора 17, связанного с исполнительным механизмом 18, установленным на линии подачи титрующего агента.
Блок реализации адаптивной модели предназначен для вычисления параметров объекта методом наименьших квадратов по данным измерений процесса. Для эффективного отслеживания изменения параметров в блоке адаптивной модели устаревшая информация отбрасывается и каждый раз в вычислении используется информация порядка десяти замеров.
В блоке 6 коррекции и блоке 10 гарантированной коррекции производится опре- деление программного, оптимального управления по соответствующей модели.
Система автоматического управления полунепрерывным процессом биосинтеза антибиотиков работает следующим обра- зом.
Сигналы с датчика 2 и анализаторов 3 и
4концентраций питательного субстрата и целевого продукта поступают на вход блока
5реализации адаптивной модели, где на основании поступивших данных прочзво- дится корректировка параметров объекта. В блоке 6 коррекции производится определение программного управления по составной модели. Составная модель представляет со- бой модель, значения параметров которой
на текущем и последующем интервалах берутся разными. При вычислении рационял1 ного управления (L|p) в блоке 6 коррекции на текущем интервале используется скорректированные значения параметров, поступающих с блока 5 реализации адаптивной модели, а на последующем интервале - априорные значения с блока 7 постоянной памяти. В первом логическом блоке 9 происходит выбор наихудших значений параметров на последующем интервале по формуле
A1
jfrb,
e JrL
гь, если sign Sic Ar| sign Sc,
(t)
если sign S Д r 4 sign Sc.
где гь, Гн - верхнее и нижнее граничные значения 1-го параметра;
SK - чувствительность текущего управления к 1-му значению параметра на текущем интервале;
Sc - чувствительность текущего управления к 1-му значению параметра на последующем интервале.
В блоке 10 гарантированной коррекции
происходит определение управления Jr по составной модели со скорректированными значениями параметра на текущем интервале и наихудшими значениями параметров на последующем интервале. Во втором логическом блоке 11 происходит проверка соотношения вида
ДиНяДиЕ,(2)
где Д UK - отклонение текущей составляющей программного управления, вызванное отклонениями текущих значений параметров (Д UE IUS - U| I). при этом US - программа управления, полученная на предыдущем такте;
Д иЈ - отклонение текущей составляющей программного управления, вызванное отклонением последующего значения параметра, Дик luЈ-uЈ|;
I - коэффициент, значение которого больше или равно двум.
Если соотношение (2) выполняется, то на выходе второго логического блока 11 выдается 1, соответствующая признак/ использования скорректированного управления, в противном случае выдается О - признак по использованию управления, найденного на предыдущем такте.
На основании полученных признаков переключающим реле 12 выдается задание регулятору в виде значения скорректированного управления или управления, найденного на предыдущем такте.
Блок 8 оперативной памяти содержит два регистра, при этом в первом регистре содержится программа управления, найденная на текущем такте, а во втором - на предыдущем.
Если с второго логического блока 11 принимается 1, то в блоке 8 оперативной памяти происходит перезапись программы из первогг регистра во второй: если О, ю вычеркивается текущий элемент предыдущего такта программы управления во втором регистре.
Регулирование рН среды и расхода питательного субстрата в ферментаторе осуществляется с помощью соответственно регуляторов 13, 17 и исполнительных механизмов, воздействующих на пол Н /титоую щего агента и питательно о субсфотя
В блок 19 присвоения поступает информация от блока 5 реализации адаптивном модели и первого логического блока 9 и производится обнуление индекса k
В блоке 20 перепрмсвиения происходит наращивание индекса k на единицу Блок 21 интегрирования осуществляет решение дифференциальных управлении методом Эйлера. В блоке 22 варьирования управления происходит прием информации ог блока 5 реализации адаптивной модели и
15
20
но ср--Е1чеьчк , мгзе - ней за ciu- 1 ороек- ции угфавле л ю парчмег ам .а тг«ущс-м I.HT ; a/ie.
В таблице приведены срлинительные результаты модолиосвании видов управлг ний процессом биосинтез.-:) -. )ги5иоти са(ок ситетрзцгчл.ж). истинного (1j. нприорного
(2) и илционального (3) где XN концентра- кия целевого продукт в концр процр :са
Моделироячж р раби ч данной сисле н ап смати еско1йупр -лени на примере rif npoiif-C ом биосинг -я окгиг р , novr-iNic ее со 41 . т .. ( ji л% при раиио, иг ьом ..ротив 6 0% iipn г-чрио ном управлении)
Ф о ь н л s i з j П о г е ч и - Сисями -TB jMari -tecKnio прорл нит пслунепрерь ьнь м процессом о огмнтезз со держ .ЩеЧя at лизатооы хопцентрзци s субстрата иг -озого г,, Дотчи уроа ,я среды п ферментере, кошур рогулирова- рия рН среды, блок реали чции адагпийной
модели и ко.1р кции т л и ч а ю щ а я- первого логического блока 9 и определение 25 г я ТРМ что г
возмущенного управления (UK UK- А ик). Блок 23 градиента предназначен для определения градиента концентрации целевого продукта покомпонентно согласно выражению30
лелью . выхода целевого продуктЈ, оьи снабжена контуром регулирования расхода питательного субстрата, блоками оперативной и постоянно памяти, двумя ло ичоскики Олокэми, блоком гарантированной коррекц,. ч г еое гючающим pe/ic, при 31СМ вход блока оеэтизации адаптивной модели сосд /нен г, анатичаторами концентраций субстрата и целевого продукта и датчиком уровня среды з ферментере, г выход - с блоком коррекции, с вторым входом блока гарантированной коррекции и первым входом первого чогического блока, блок постоянной пампти соединен с первым логическим блоком и блоком коррекции, а выход последнего соединен с регулятором контура регулирования расхода питательного субстрата через блок оперативной памяти и переключающее рз/те, выход первого логического блока соединяй с первым вхо- - дом блока гарантированной коррекции, выход которого соединен с первым входом второю логического блок, второй вход которою соединен с первым РНХОДОМ блока оперативной памяти, а его выход - с первым входом блока оперативной памяти и переключающим реле.
АХ
дп
X(Ui. U2UKUn)-X(Ui, ,)
A UK
(3)
Определение расчетного управления определяется в расчетном блоке 24 по формуле
u u + HTOгде Н - шаг итерации.
Далее в первом блоке 25 проверки условия проверяется достижение индексом k заданного значения. Во втором блоке 26 проверки условия проверяется достижение градиентом концентрации целевого продую та заданного значения. Реализация блока 10 гарантированной коррекции возможна на управляющей ЭВМ, в том числе на микропроцессорной технике.
Данная система автоматического уп-
равления процессом биосинтеза обеспечи-, вает увеличение выхода целевого продукта
-
5
0
но ср--Е1чеьчк , мгзе - ней за ciu- 1 ороек- ции угфавле л ю парчмег ам .а тг«ущс-м I.HT ; a/ie.
В таблице приведены срлинительные результаты модолиосвании видов управлг ний процессом биосинтез.-:) -. )ги5иоти са(ок ситетрзцгчл.ж). истинного (1j. нприорного
(2) и илционального (3) где XN концентра- кия целевого продукт в концр процр :са
Моделироячж р раби ч данной сисле н ап смати еско1йупр -лени на примере rif npoiif-C ом биосинг -я окгиг р , novr-iNic ее со 41 . т .. ( ji л% при раиио, иг ьом ..ротив 6 0% iipn г-чрио ном управлении)
Ф о ь н л s i з j П о г е ч и - Сисями -TB jMari -tecKnio прорл нит пслунепрерь ьнь м процессом о огмнтезз со держ .ЩеЧя at лизатооы хопцентрзци s субстрата иг -озого г,, Дотчи уроа ,я среды п ферментере, кошур рогулирова- рия рН среды, блок реали чции адагпийной
модели и ко.1р кции т л и ч а ю щ а я- 25 г я ТРМ что г
30
лелью . выхода целевого продуктЈ, оьи снабжена контуром регулирования расхода питательного субстрата, блоками оперативной и постоянно памяти, двумя ло ичоскики Олокэми, блоком гарантированной коррекц,. ч г еое гючающим pe/ic, при 31СМ вход блока оеэтизации адаптивной модели сосд /нен г, анатичаторами концентраций субстрата и целевого продукта и датчиком уровня среды з ферментере, г выход - с блоком коррекции, с вторым входом блока гарантированной коррекции и первым входом первого чогического блока, блок постоянной пампти соединен с первым логическим блоком и блоком коррекции, а выход последнего соединен с регулятором контура регулирования расхода питательного субстрата через блок оперативной памяти и переключающее рз/те, выход первого логического блока соединяй с первым вхо- дом блока гарантированной коррекции, выход которого соединен с первым входом второю логического блок, второй вход которою соединен с первым РНХОДОМ блока оперативной памяти, а его выход - с первым входом блока оперативной памяти и переключающим реле.
35
40
50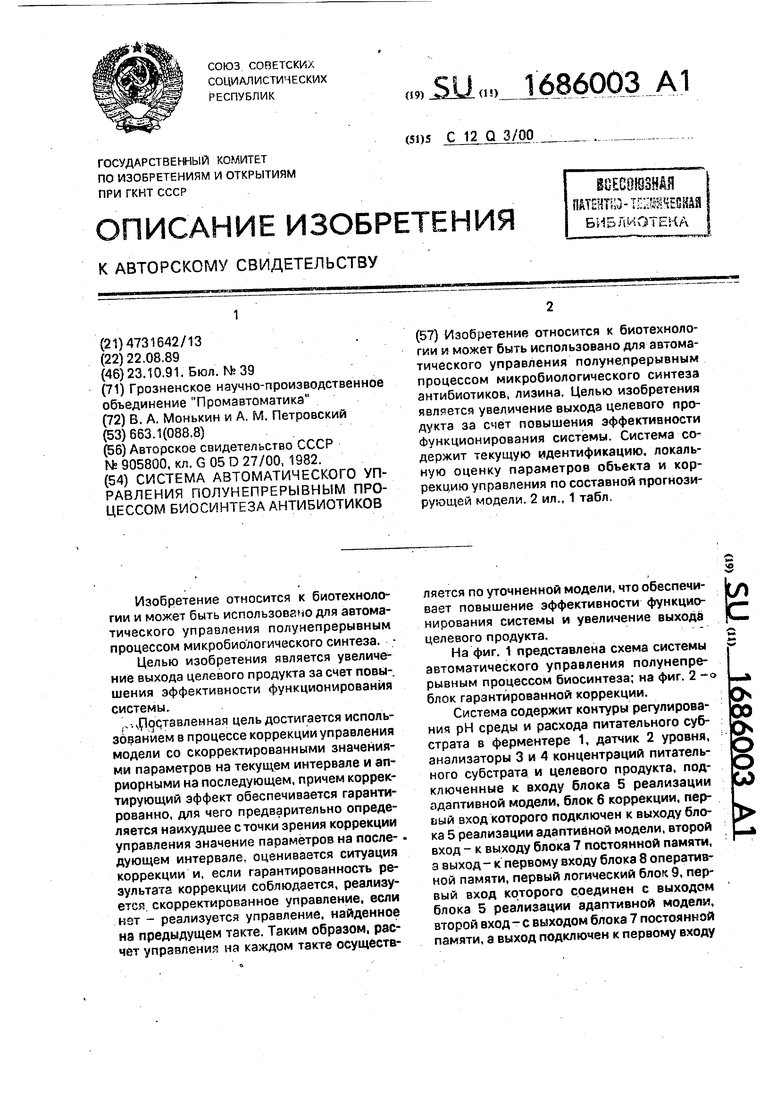


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления полунепрерывным процессом культивирования микроорганизмов | 1980 |
|
SU905800A1 |
| Система автоматического управления периодическим процессом биосинтеза микроорганизмов в ферментере | 1980 |
|
SU940144A1 |
| Система управления процессом культивирования микроорганизмов | 1988 |
|
SU1555698A2 |
| Способ автоматического управления процессом выращивания микроорганизмов | 1990 |
|
SU1747492A1 |
| Система автоматического управления процессом непрерывного выращивания микроорганизмов | 1989 |
|
SU1648981A1 |
| Система автоматического управления периодическим процессом ферментации | 1981 |
|
SU976431A1 |
| Система автоматического управления периодическим процессом культивирования микроорганизмов | 1984 |
|
SU1227664A1 |
| Система автоматического управления про-цЕССОМ биОСиНТЕзА биОлОгичЕСКи АКТиВНыХВЕщЕСТВ | 1979 |
|
SU845144A1 |
| Система автоматического управления циклическим процессом непрерывного культивирования микроорганизмов | 1987 |
|
SU1442551A1 |
| Система автоматического управления процессом культивирования микроорганизмов | 1984 |
|
SU1353810A1 |
Изобретение относится к биотехнологии и может быть использовано для автоматического управления полунепрерывным процессом микробиологического синтеза антибиотиков, лизина. Целью изобретения является увеличение выхода целевого продукта за счет повышения эффективности Функционирования системы. Система содержит текущую идентификацию, локальную оценку параметров объекта и коррекцию управления по составной прогнозирующей модели. 2 ил., 1 табл.
От 5лока 5,9
Гл„
Фи&1
| Система автоматического управления полунепрерывным процессом культивирования микроорганизмов | 1980 |
|
SU905800A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
