15
12 11
Ж
i (/
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТ | 1972 |
|
SU349035A1 |
| Датчик давления | 1987 |
|
SU1425489A1 |
| Сигнализатор давления | 1989 |
|
SU1675706A1 |
| ПРИЖИМНОЙ РЫЧАГ СКВАЖИННЫХ ГЕОФИЗИЧЕСКИХПРИБОРОВ | 1970 |
|
SU258991A1 |
| Сигнализатор давления | 2024 |
|
RU2825172C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2707879C1 |
| ЭЛЕКТРОМАГНИТНАЯ ТОПЛИВНАЯ ФОРСУНКА | 1998 |
|
RU2136950C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2685246C1 |
| Сигнализатор давления | 1980 |
|
SU1017936A1 |
| КЛАПАН МАГНИТОРЕГУЛИРУЕМЫЙ (ВАРИАНТЫ) | 2005 |
|
RU2307279C2 |
Изобретение относится к приборостроению и обеспечивает повышение надежности. чувствительности и ви15роустойчивости сигнализатора, а также возможность изменения пределов срабатывания. Цель достигается благодаря тому, что подвижный якорь 9 индуктивного преобразователя жестко соединен с втулкой 13, посаженной на направляющий стержень 12, введенный в центральное отверстие магнитопровода 8 и закрепленный на корпусе. При этом втулка 13 с якорем размещены между сжатой пружиной 14 и упором 16, выполненным на свободном конце стержня 12, а жесткий центр 1 мембраны 3 с обеих сторон имеет кольцевые бурты 5 с прорезями 6, взаимодействующие соответственно с якорем 9 и упором 17 на корпусе. 2 ил.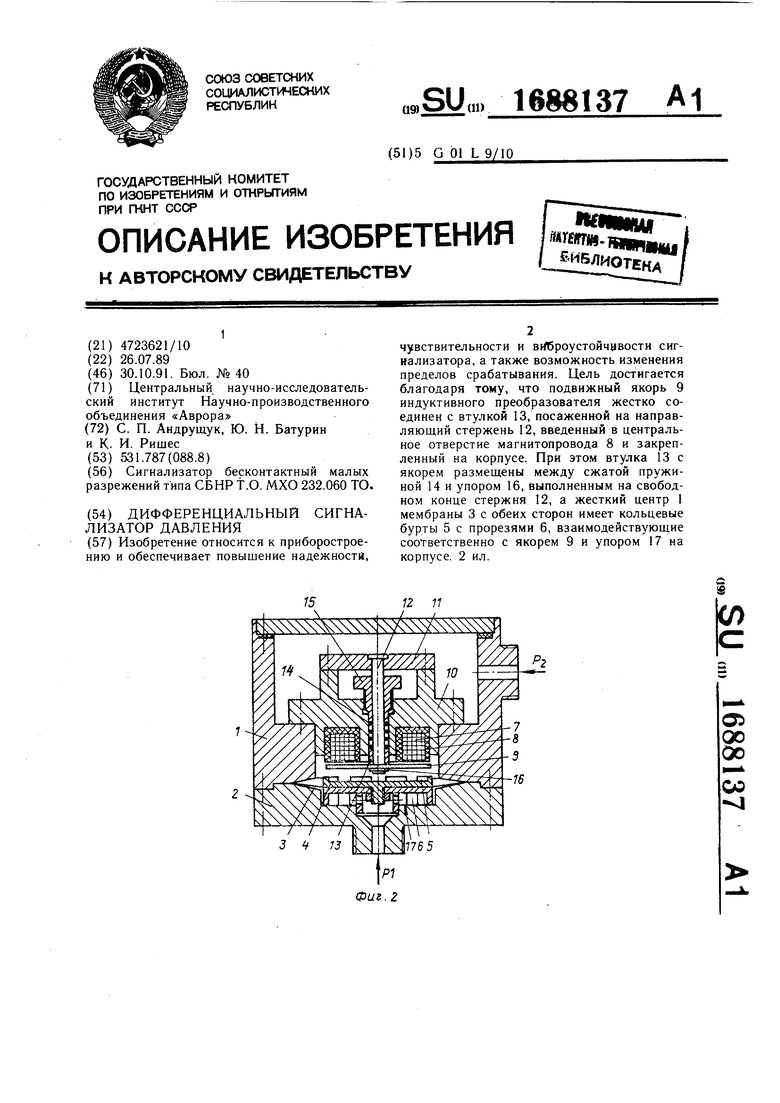
05
оо
00
оо 1
Изобретение относится к приборостроению, в частности к приборам контроля перепада давления
Целью изобретения является повышение надежности, чувствительности и виброустойчивости сигнализатора, а также обеспечение возможности изменения пределов срабатывания
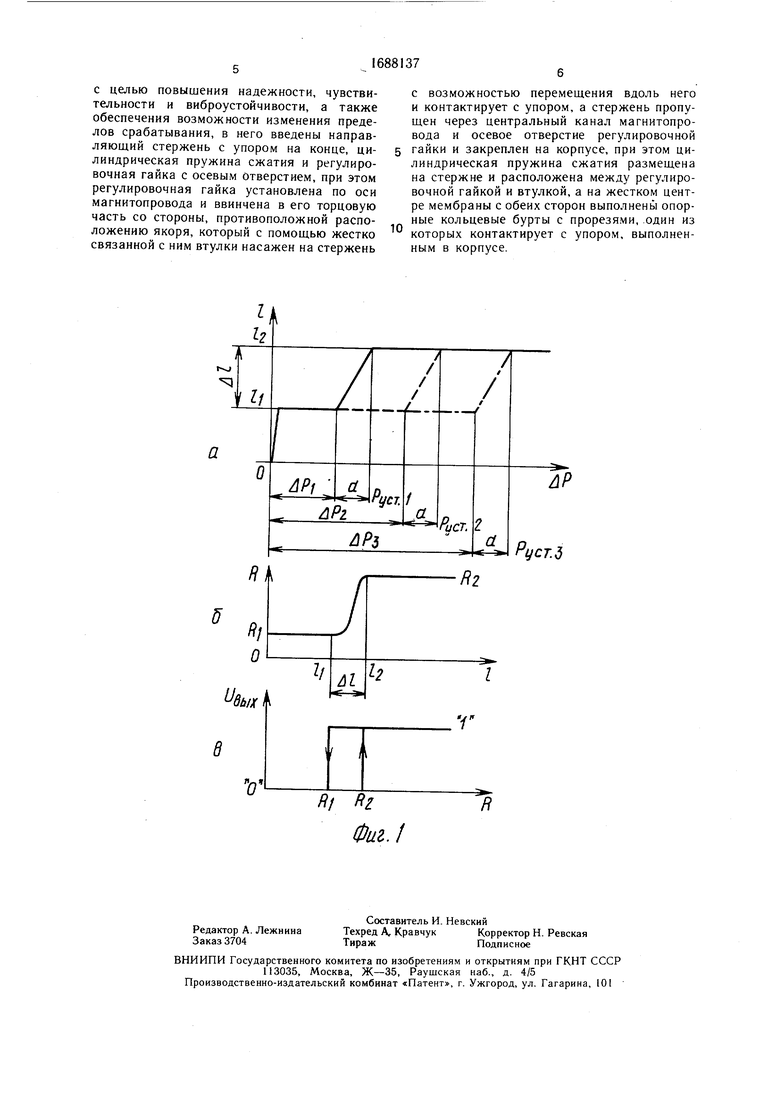
На фиг 1 графически представлена статическая характеристика сигнализатора, на фиг 2 - конструктивная схема сигнализатора.
Статическая характеристика сигнализатора состоит из статических характеристик его звеньев
чувствительного элемента (мембраны в сочетании с пружиной преобразователя) - зависимость перемещения жесткого центра от перепада давления (фиг ,а),
индуктивного преобразователя перемещения - зависимость сопротивления катушки от перемещения центра мембраны (фиг 1),
вторичного электронного преобразователя, выполненного, например, по известной компараторной схеме - зависимость состояния рабочих контактов («О или «1) от значения сопротивления катушки индуктивного преобразователя (фиг 1,0)
Показанное на фиг 1/J семейство характеристик получается при изменении предварительного сжатия рабочей пружины преобразователя в процессе регулировки, чем обеспечивается выставление различных заданных значений перепадов давления срабатывания сигнализатора (P4CTi, Ркт2 и т д) за счет различия значений перепада давле ния (АР,. ДР и т д), при достижении которых начинается совместное перемещение якоря и мембраны
При этом п
где Q - усилие предварительно сжатой пружины (может быть Qi, Q2, Qz и т д ), /,ф- эффективная площадь мембраны Предлагаемый сигнализатор (без вторичного преобразователя) содержит корпус, состоящий из основания 1 и фланца 2, в котором размещена вялая мембрана 3 с жестким центром 4, имеющим с обеих сторон кольцевые бурты 5 с прорезями 6 Индуктивный преобразователь состоит из катушки 7, цилиндрического магнитопровода 8 Ш-образного сечения и якоря 9 Магнито- провод с катушкой размещены в корпусе, состоящем из жестко соединенных обоймы 10, установленной в основании 1, и планки 11, в которую запрессован направляющий стержень 12, проходящий коаксиально через центральное отверстие магнитопровода 8 На стержень надеты втулка 13, жестко связанная с якорем 9, и цилиндрическая пружина 14, поджатие которой обеспечивается
регулировочной гайкой 15 На свободном конце стержня 12 выполнен упор 16, к которому прижата пружиной 14 втулка 13 с якорем 9
Дифференциальный сигнализатор давления работает следующим образом
При возникновении перепада давлений (превышение давлением Р давления Р2) мембрана 3 с центром 4 отрывается от упора 17 фланца 2, на который она упиралась нижним буртом 5, и упирается верхним буртом 5 в якорь 9, который остается неподвижным до тех пор, пока перепад давлений на мембране не превысит (с учетом значений эффективной площади мембраны) значения, 5 эквивалентного значению усилия предварительно сжатой пружины 14
Прорези 6 при возникновении перепада давлений обеспечивают его воздействие на всю эффективную поверхность мембраны
При достижении перепадом давлений значения ДР (фиг 1, а) начинается совместное перемещение мембраны 3 и якоря 9 с втулкой 13, направляемой стержнем 12 Пружина 14 сжимается до усилия, эквивалентного значению перепада давлений PVCI 5 (фиг 1, а), при котором якорь 9 подходит к торцу магнитопровода 8 катушки 7 Происходит резкое изменение сопротивления последней и, следовательно, срабатывание сигнализатора
При уменьшении перепада давлений пру- 0 жина 14 возвращает якорь 9 к упору 16, а мембрана вновь упирается нижним буртом 5 в упор 17 фланца 2
Предлагаемый в конструкции сигнализатора разрыв жесткой связи между мембраной и якорем обеспечивает уменьшение 5 подвижных масс, что позволяет повысить виброустойчивость сигнализатора при сохранении его высокой чувствительности
Размещение преобразователя в корпусе в строго определенном положении, незави- Q сящем от заданного значения перепада давлений срабатывания, обеспечивает защиту всей поверхности мембраны при перегрузках давлением, что повышает надежность сигнализатора при сохранении его высокой чувствительности и обеспечении возможности 5 с помощью регулировочной гайки изменить значения уставки сигнализатора как в заводских условиях, так и в процессе эксплуатации
Формула изобретения
0 Дифференциальный сигнализатор давления, содержащий размещенные в корпусе мембрану с жестким центром и индуктивный преобразователь перемещения, выполненный в виде катушки с цилиндрическим маг- нитопроводом Ш-образного сечения, имею- щим центральный канал, и подвижного якоря в виде пластины, отличающийся тем, что.
с целью повышения надежности, чувствительности и виброустойчивости, а также обеспечения возможности изменения пределов срабатывания, в него введены направляющий стержень с упором на конце, цилиндрическая пружина сжатия и регулировочная гайка с осевым отверстием, при этом регулировочная гайка установлена по оси магнитопровода и ввинчена в его торцовую часть со стороны, противоположной распос возможностью перемещения вдоль него и контактирует с упором, а стержень пропущен через центральный канал магнитопровода и осевое отверстие регулировочной 5 гайки и закреплен на корпусе, при этом цилиндрическая пружина сжатия размещена на стержне и расположена между регулировочной гайкой и втулкой, а на жестком цент ре мембраны с обеих сторон выполнены опорные кольцевые бурты с прорезями, один из
-I tl Ч I L , S I V/ I LV1 , I I I 1 fl I I t I I VX- --
ложению якоря, который с помощью жестко 1и которых контактирует с упором, выполненсвязанной с ним втулки насажен на стержень
ным в корпусе
ч
с возможностью перемещения вдоль него и контактирует с упором, а стержень пропущен через центральный канал магнитопровода и осевое отверстие регулировочной гайки и закреплен на корпусе, при этом цилиндрическая пружина сжатия размещена на стержне и расположена между регулировочной гайкой и втулкой, а на жестком цент ре мембраны с обеих сторон выполнены опорные кольцевые бурты с прорезями, один из
-
которых контак
ным в корпусе
| Сигнализатор бесконтактный малых разрежений типа СБНР Т.О | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
