JND
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОИНДУКЦИОННЫЙ ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1994 |
|
RU2122742C1 |
| Устройство для калибровки позиционно-чувствительных магнитоиндукционных датчиков пучка заряженных частиц | 1987 |
|
SU1600006A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ В СОСУДЕ | 2004 |
|
RU2273007C1 |
| Датчик угловой скорости | 1981 |
|
SU991305A1 |
| Вторичные электрические часы с обратным контролем | 1984 |
|
SU1365040A1 |
| Устройство для измерения положения центра импульсных пучков заряженных частиц | 1977 |
|
SU639392A1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2014 |
|
RU2561303C1 |
| Устройство для суперфиниширования беговых дорожек шарикоподшипников | 1977 |
|
SU738845A1 |
| Способ измерения крутящего момента и устройство для его осуществления | 1990 |
|
SU1795311A1 |
| УСТРОЙСТВО ДЕФЕКТОСКОПИИ СТАЛЬНЫХ КАНАТОВ | 2006 |
|
RU2356041C2 |
Изобретение относится к ускорительной технике. Цель изобретения - повышение относительной точности и стабильности измерения положения центра Тяжести импульсного пучка заряженных частиц. Устройство для измерения положения центра тяжести импульсных пучков заряженных частиц содержит маг- нитоиндукционные датчики тока и положения, замкнутый магнитопроводящий сердечник, систему формирования, систему нормировки сигналов, на вход которой подключены выходы датчиков. При этом на внутренней поверхности замкнутого магнитопровода выполнена по крайней мере одна пара полюсных наконечников, расположенных симметрично относительно его оси, обмотка магни- тоиндукционного датчика тока размещена равномерно по сердечнику на участках между полюсными наконечниками.. Обмотка датчика положения размещена на полюсных наконечниках, а на выходе с обмоток датчиков включены дополнитель- - но введенные конденсаторы, емкости которых выбраны так, чтобы резонансные частоты колебательных контуров, образованных обмотками датчиков и конден- саторами, были различны. 3 ил. ton О)
Изобретение относится к ускорительной технике и может быть использовано для измерения положения центра тяжести импульсных пучков заряженных частиц.
Целью изобретения является повышение относительной точности и стабильности измерений.
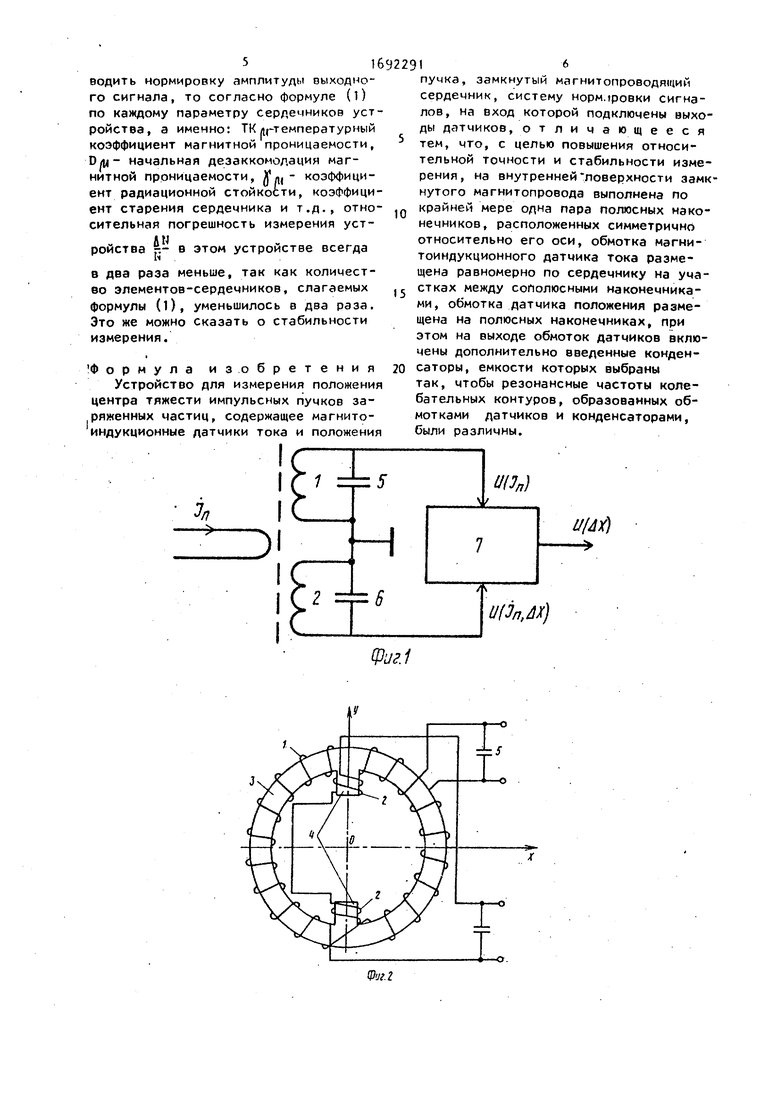
На фиг. 1 приведена принципиально- функциональная схема устройства; на фиг. 2 - общий вид одного из вариантов датчика; на фиг. 3 временные диаграммы, поясняющие его работу. 5-г lft-9Y
Устройство состоит из обмоток 1 и 2 датчиков тока и положения пучка соответственно, размещенных на одном общем замкнутом магнитопроводящем сердечнике 3, имеющем на внутренней поверхности по крайней мере одну пару противолежащих относительно центра 0 устройства полюсных наконечников 4, при этом обмотка 1 датчика тока размещена равномерно по сердечнику 3 на участках между полюсными наконечниками 4, а обмотка 2 датчика положения размещена на полюсных наконечниках Ь, к обмоткам 1 и 2 датчиков подсоединены емкости 5 и 6, причем резонансные частоты колебательных контуров, образованных индуктиеностями об- моток 1 и 2 датчиков и емкостями 5 и 6, выбраны различными, а выходы датчиков подключены к системе 7 нормировки.
Устройство работает следующим об- разом. При прохождении пучка заряженных частиц через центр 0 датчика, Т.е при отсутствии смещения пучка UX относительно этого центра, сигнал U (ДО) на выходе обмоток 2 датчика по- ложения равен нулю, а сигнал U(ln) на выходе обмотки 1 датчика тока пропорционален прошедшему через датчик току 1П пучка, т.е.
и(Ш-о, u(in)in.
При смещении пучка относительно центра 0 датчика сигнал на выходе обмотки 2 датчика положения будет пропоционален величине смещения пучка Д.Х относительно его центра 0 и току 10 прошедшего через него пучка, т.е.:
U(AX,tnbuX In,
а на выходе обмотки 1 датчика тока сигнал будет таким же, как и при отсутствии смещения пучка, т.е.:
u(in)-in.
Так как устройство имеет общий маг нитопроводящий сердечник с полюсами, а обмотка 1 датчика тока и обмотка 2 датчика положения, намотанные на нем, образуют с дополнительными емкостями 5 и 6 резонансные контуры ударного возбуждения и для исключения взаимного влияния колебаний одного датчика н другой в момент их работы резонансные частоты колебательных контуров выбра- ны отличными одна от другой (в конкреном случае для датчика тока fp3 кГц, а для датчика положения кГц и 110 кГц), сигналы с выходов датчиков поступают на вход системы 7 нормиров- ки, на выходе которой получаем сигнал, пропорциональный только величине смещения пучка относительно центра О устройства, т.е.
Ш4НШ4а Ц я- ах..
UUn In
Этот сигнал в виде аналоговой или цифровой величины можно использовать
5
0
5
0
5
0 5 0
для определения смещения пучка или использовать его как сигнал обратной связи для удержания пучка в заданном месте.
Для того, чтобы устройство работало дополнительно по какой-либо дру- „ гой координате, например Y, его сердечник должен иметь еще одну пару противолежащих, расположенных перпендикулярно имеющимся полюсных наконечников, также с условием различия резонансной частоты от имеющихся.
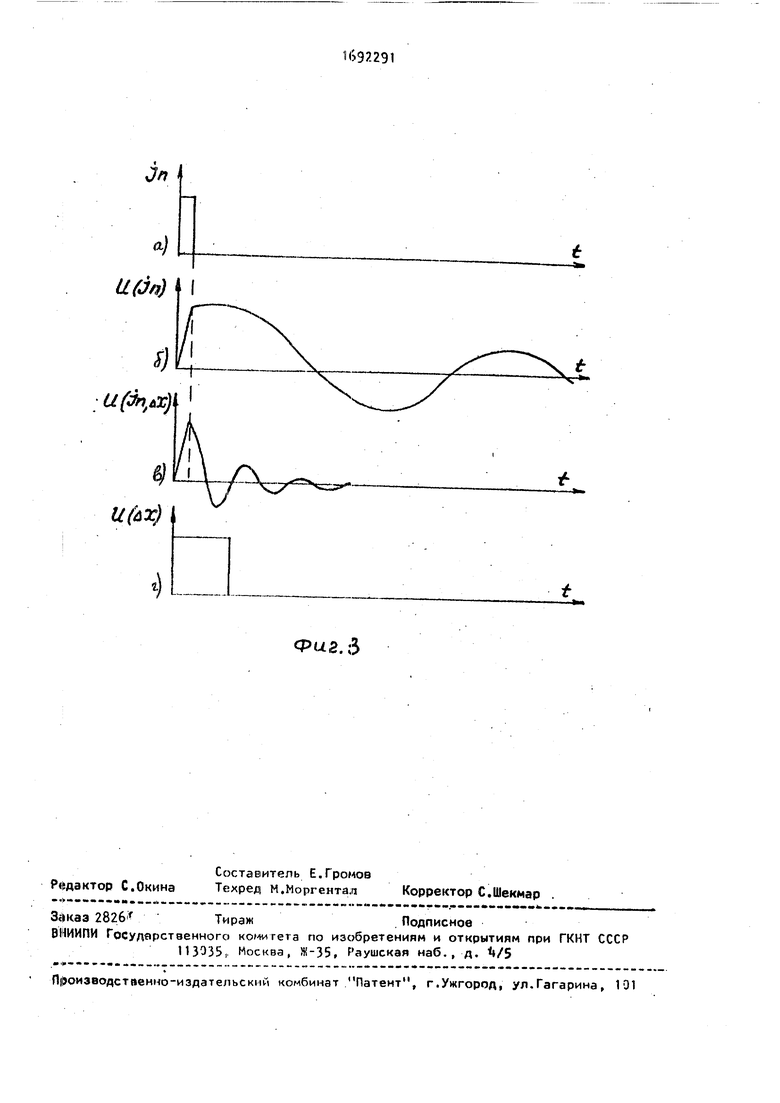
На фиг. 3 приведены эпюры сигналов, проходящих по тракту устройства в точках:
а - импульс тока пучка заряженных частиц, прошедшего через датчик;
б - амплитуда и форма сигнала на выходе обмоток датчика тока;
в - амплитуда и форма сигнала на выходе обмоток датчика положения, его начальная фаза определяет направление смещения пучка относительно центра устройства;
г - сигнал на выходе системы нормировки, амплитуда которого зависит только от величины смещения пучка относительно центра устройства.
Амплитуду каждого сигнала датчиков положения после интегрирования нормируют на амплитуду сигнала датчика тока. Амплитуда сигнала на выходе системы нормировки пропорциональна величине смещения пучка в виде аналоговой величины и использовалась в дальнейшем как сигнал обратной связи для стабилизации положения пучка.
Известно, что погрешность измерения, как мгновенную, так и долговременную можно определить по формуле
У. TA.b-ai
N Q:
(1)
ч;
где (q ,,({Ј,... fqh) погрешность измерения устройства, являющаяся функцией параметров элементов, входящих в это устройство;
А - коэффициент влияния погрешности элемента на все устройство;
АЗ; ч;
относительная погрешность 1-го элемента, входящего в устройство.
Так как в данном устройстве отсутствует второй сердечник, относительно которого постоянно необходимо производить нормировку амплитуды выходного сигнала, то согласно формуле О) по каждому параметру сердечников устройства, а именно: ТК «(-температурный коэффициент магнитной проницаемости, Вд|- начальная дезаккомол.эция магнитной проницаемости, ft nt - коэффициент радиационной стойкости, коэффициент старения сердечника и т.д., относительная погрешность измерения устройства г.- B этом устройстве всегда ь
в два раза меньше, так как количество элементов-сердечников, слагаемых формулы (О, уменьшилось в два раза. Это же можно сказать о стабильности измерения.
Формула изобретения
Устройство для измерения положения центра тяжести импульсных пучков заряженных частиц, содержащее магнито- индукционные датчики тока и положения
0
5
пучка, замкнутый магнитопроводящий сердечник, систему норм.фовки сигналов, на вход которой подключены выходы датчиков, отличающееся тем, что, с целью повышения относительной точности и стабильности измерения, на внутренней поверхности замкнутого магнитопровода выполнена по крайней мере одна пара полюсных наконечников, расположенных симметрично относительно его оси, обмотка магни- тоиндукционного датчика тока размещена равномерно по сердечнику на участках между сополюсными наконечниками, обмотка датчика положения размещена на полюсных наконечниках, при этом на выходе обмоток датчиков включены дополнительно введенные конденсаторы, емкости которых выбраны так, чтобы резонансные частоты колебательных контуров, образованных обмотками датчиков и конденсаторами, были различны.
4
U(Jn)
u№
фиг. В
t
