(21)4762898/13
(22)28.11.89
(46) 15.12.91. Бюл. №46
(71)Калининградский технический институт рыбной промышленности и хозяйства
(72)ЮАДанилов, Г.Г.Пиянзов и Э.М.Давидов
(53)639.2.081 (088.8)
(56)Авторское свидетельство СССР № 1457831, кл. А 01 К 79/00, 1987.
(54)УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГИДРОДИНАМИЧЕСКОГО ПОЛЯ ДЕТАЛЕЙ ОРУДИЙ ЛОВА
(57)Изобретение относится к технике промышленного рыболовства и может быть использовано для моделирования гидродинамического поля ориентира устройства для образования скоплений промысловых рыб. Цель изобретения - повышение точности моделирования гидродинамического поля деталей, выполненных в виде трубы, передняя часть которой имеет цилиндрическую, а хвостовая - коническую форму. Каркас, выполненный из диэлектрического материала, образован тремя наборами полых дисков 1 различного диаметра. Диски 1 смонтированы на направляющей 2 посредством вертикальных стоек с ползунами 4. По периметру каждого диска 1 расположены проводники 5, соединенные параллельно и подключенные посредством переменного сопротивления к источнику переменного напряжения. Перемещением ползунов 4 с помощью дисков 1 образуют каркас наружной формы. 4 ил.
&
Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Модель тралового мешка | 1989 |
|
SU1667786A1 |
| Модель тралового мешка | 1989 |
|
SU1711760A2 |
| Модель деталей орудий лова | 1985 |
|
SU1324611A1 |
| Устройство для моделирования гидродинамического поля детали орудия лова | 1989 |
|
SU1651809A1 |
| Устройство для изучения гидродинамического поля деталей орудий лова | 1990 |
|
SU1796108A1 |
| Устройство для изучения гидродинамического поля деталей орудия лова | 1990 |
|
SU1808279A1 |
| Модель деталей орудия лова | 1989 |
|
SU1792605A1 |
| Модель рыболовного орудия | 1989 |
|
SU1720073A1 |
| Модель движущегося объекта | 1988 |
|
SU1517061A2 |
| Модель плоского профильного тела | 1986 |
|
SU1400571A1 |
Изобретение относится к технике промышленного рыболовства и может быть использовано для моделирования гидродинамического поля ориентира устройства для образования скоплений промысловых рыб.
Известны устройства для моделирования гидродинамических деталей орудий лова, построенные в соответствии с методом физического моделирования. Для определения гидродинамических характеристик модель продувают в аэродинамической трубе, протаскивая в опытовом бассейне, или помещают в поток воды в гидролотке.
Аэродинамические трубы, опытовые бассейны и гидролотки представляют собой капитальные сооружения, требуют больших
трудозатрат и специального оборудования и поэтому малопригодны для учебных целей.
Известны модели орудий лова, построенные в соответствии с методом электрогидродинамической аналогии. Для определения гидродинамического поля модель, выполненную в виде электродов, помещают в электролитическую ванну.
К основным недостаткам электролитической ванны можно отнести сложность конструкции, потребность в электролите и трудоемкость замера потенциалов поля.
Наиболее близким техническим решением к предлагаемому является устройство для моделирования гидродинамического поля деталей орудия лова, содержащее карОч
ю
XJ Os
Os
U
кас из диэлектрического материала, состоящий из первого набора полых дисков равного диаметра и второго набора полых дисков с диаметрами, убывающими по направлению к первому набору дисков, закрепленных соосно на стойках и установленных при помощи ползунов на направляющей, и проводники, .нанесенные по периметру полых дисков, соединенные между собой и подключенные при помощи проводов через пе ременное сопротивление к источнику переменного напряжения параллельно, при этом длина каждого провода составляет не менее трех длин каркаса. Известное устройство позволяет расширить функциональные возможности и повысить точность моделирования гидродинамического поля вызванных скоростей внутри тралового мешка.
Однако известное устройство не обеспечивает моделирование гидродинамического поля вызванных скоростей в виде ориентира устройства для образования промысловых скоплений рыб, выполненного в виде трубы, передняя часть которой имеет цилиндрическую, а хвостовая - коническую форму.
Целью изобретения является повышение точности моделирования гидродинамического поля деталей, выполненных в виде трубы, передняя часть которой имеет цилиндрическую, а хвостовая - коническую форму.
Поставленная цель достигается тем, что устройство дополнительно содержит третий набор полых дисков с диаметрами, убывающими по направлению к второму набору полых дисков, и с нанесенными по их периметрам проводниками, включенными при помощи проводов через переменные сопротивления к источнику переменного напряжения параллельно, при этой третий набор полых дисков расположен соосно между первым и вторым наборами полых дисков, а каждый диск третьего набора закреплен на стойке с ползуном, установленным на направляющей.
Изобретение обеспечивает имитацию гидродинамического поля вызванных скоростей вне ориентира устройства для образования промысловых скоплений рыб с необходимой для практики точностью.
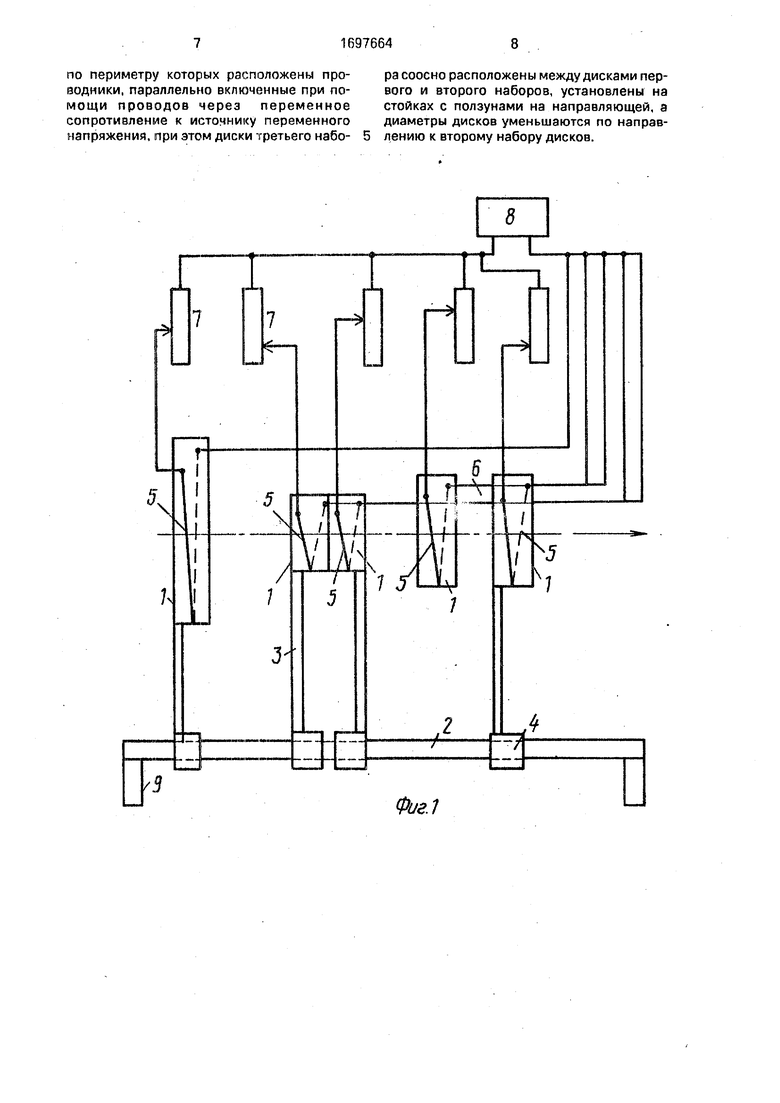
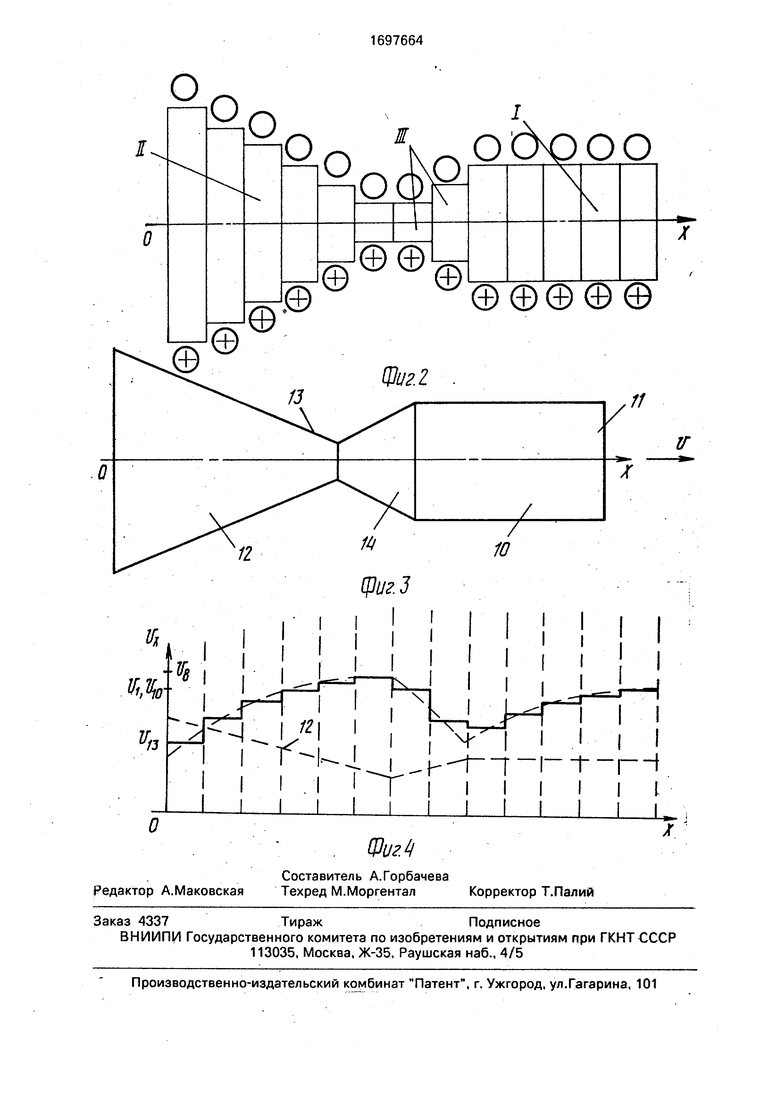
На фиг. 1 изображено устройство для моделирования промысловых скоплений рыб, общий вид; на фиг. 2 - диски, с проводниками гидродинамического поля деталей орудий лова, вертикальный разрез; на фиг.
3- ориентир, вертикальный разрез; на фиг,
4- график значений скорости потока воды внутри ориентира.
Устройство (фиг.1) состоит из каркаса, выполненного из диэлектрического материала и образованного набором полых дисков 1 различного диаметра, направляющей .2
для монтажа последних и крепежных элементов, каждый из которых содержит верти- кальную стойку 3 и ползун 4, смонтированный с возможнстью перемещения по направляющей 2.
0 По диаметру каждого диска 1 расположены проводники 5, соединенные встречно и подключенные посредством проводов 6 через переменные сопротивления 7 к источнику 8 переменного электрического напря5 жения, который может быть выполнен, например, в виде звукового генератора.
Переменное сопротивление 7 может быть выполнено в виде резистора. Направляющая 2 закреплена на раме 9. Для исклю0 чения влияния магнитного поля проводов 6 на магнитное поле проводников 5 длину проводов 6 выбирают равной не менее трех длин каркаса.
При помощи ползунов 4 полые диски 1,
5 перемещенные по направляющей 2, образуют диэлектрический каркас, форма которого подобна форме ориентира (фиг.З).
При этом первый набор I полых дисков 1 равного диаметра имитирует форму ци0 линдрической части 10 ориентира с его передним открытым отверстием 11; второй набор II полых дисков 1 имитирует форму открытой струи 12, выходящей из кормового отверстия 13 конической хвостовой части 14
5 ориентира; третий набор II полых дисков 1 имитирует форму конической хвостовой части 14(фиг,2иЗ).
Модель ориентира работает следующим образом.
0 Перед началом работы выбирают линейный масштаб моделирования
C L/I, где L- длина ориентира;
I - длина модели ориентира.
5 Затем определяют нужное число полых дисков 1, при этом исходят из того, что при обтекании ориентира в реальных условиях скорость потока внутри него изменяется по длине. Кривая (график на фиг.4) может
0 быть аппроксимирована ломаной линией, горизонтальные участки которой соответствуют значениям скоростей потока vi,...vi3, а вертикальные ограничивают участки ориентира со струей 12, в пределах которого эти
5 скорости действуют.
В соответствии с графиком на фиг. 4 изготавливают диски 1, число которых равно числу горизонтальных участков графика. Диски 1 при помощи вертикальных стоек 3 и ползунов 4 монтируют по направляющей 2. На каждый диск наносят проводник 5, к концам которого при помощи клемм (на фиг. 1 не обозначены) присоединяют провода б, притом для обеспечения их горизонтального положения (параллельно оси ОХ) провода б от дисков 1 меньшего диаметра пропускают через внутреннюю полость дисков 1 большего диаметра.
После включения проводников 5 на выход источника 8 переменного электрического напряжения внутри модели ориентира возникает переменное магнитное поле с напряженностью Но, которое имитирует гидродинамическое поле вызванных скоростей УХ внутри ориентира и образуемой им струи 12 при буксировке со скоростью v. Поскольку ориентир входит в устройство для образования промысловых скоплений рыб, то необходимо знать гидродинамическое поле вызванных скоростей, которое воздействует на рыб при буксировке ориентира во внешнем пространстве ориентира (впереди, сверху, снизу, сбоку).
В сходственных точках геометрически подобных областей магнитного поля и гидродинамического поля вызванных скоростей имеет место равенство Wi Hi W2 Н2
где Wi и W2 - вызванные скорости в двух любых точках;
Hi и Н2 - напряженности в сходственных точках магнитного поля.
Напряженности Н переменного магнитного поля измеряют одним из известных способов, в частности с помощью калиброванной измерительной катушки сечением д с числом витков w. Постоянная такой катушки выражена в квадратных сантиметрах. Измерительную катушку размещают в точках внутри модели и посредством электронного вольтметра измеряют наведенную в катушке ЭДС.
Действующее значение ЭДС, наведенной в катушке переменным магнитным полем, изменяющимся по синусоидальному закону, определяется выражением
Е 4,44 , где Е - наведенная в катушке ЭДС;
Ф- пронизывающий катушку магнитный поток;
f - частота синусоидального переменного тока;
w - число витков измерительной катушки.
Так как пронизывающий катушку магнитный поток Ф / HS то при // 1 измеряемая вольтметром величина ЭДС Е 4,44
HfSw, откуда напряженность магнитного поля
Н
4,4 fSw
5При постоянной катушки Sw в квадратных сантиметрах и измерении Е в вольтах напряженность Н магнитного поля в системе С ГС будет
Н
Е 10
,8
10 - 4,44
или в системе СИ
Э,
5
5
1 Ъ - 7Q fi -
1 d 4 М У Ь М Чтобы не заниматься пересчетом измеренных величин,заранее строяттарировоч- ную кривую показаний вольтметра в значениях вызванных скоростей путем измерений в поле известной напряженности.
Q При измерениях поля вне модели ориентира измерительную катушку при помощи держателя помещают снаружи полых дисков 1 в различных точках вертикальных плоскостей, проходящих через плоскости
с проводников 5. На листе миллиметровой бумаги строят профиль модели ориентира, в соответствующих точках проставляют измеренное значение полей. По совокупности измерений в этих точках получают картину
Q поля вне ориентира.
Введение в модель третьего набора полых дисков с соответствующим его располо- жением расширяет функциональные возможности и повышает точность модели- с рования ориентира, состоящего из цилиндрической части с передним отверстием, конической насадки с кормовым отверстием и струи.
Формула изобретения
п Устройство для моделирования гидродинамического поля деталей орудий лова, содержащее каркас из диэлектрического материала, образованный двумя наборами полых дисков, в одном из которых диски
5 имеют одинаковый диаметр, а в другом диаметры дисков уменьшаются в направлении к первому набору направляющую, в которой посредством ползунов установлены стойки для крепления дисков, проводники, распоQ ложенные по периметру дисков, параллел.ь- но соединенные между собой и подключенные при помощи проводов через переменное сопротивление к источникам переменного напряжения, отличающееся тем, что, с целью повышения точности
моделирования гидродинамического поля деталей, выполненных в виде трубы, передняя часть которой имеет цилиндрическую, а хвостовая - коническую форму, устройство снабжено третьим набором полых дисков,
по периметру которых расположены проводники, параллельно включенные при помощи проводов через переменное сопротивление к истопнику переменного напряжения, при этом диски третьего набора соосно расположены между дисками первого и второго наборов, установлены на стойках с ползунами на направляющей, а диаметры дисков уменьшаются по направ- лению к второму набору дисков.
Фие.1
О
I.
о
о
о Ч обооо
о
ОФ
о
N
Составитель А.Горбачева Редактор А.МаковскаяТехред М.МоргенталКорректор Т.Палий
Заказ 4337ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТСССР 113035, Москва, Ж-35, Раушская наб.. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
обоо
N
OteZ .
11
V
/
(Риг 4
