Изобретение относится к электротехнике и, в частности, может быть использовано в качестве привода вентиляторов и гидронасосов с непрерывной работой в системах, в которых отсутствует возможность проведения-регламентных работ, и является усовершенствованием изобретения по авт.сг. Ns 1458961.
Целью изобретения является повышение КПД и надежности путем снижения пульсаций потребляемого электродвигателем тока и ограничений бросков пускового тока.
На чертеже представлена блок-схема управляемого вентильного электродвигателя.
Управляемый вентильный электродвигатель содержит два мостовых инвертора 1 и 2 (фиг,1). Плечи каждого из мостовых инверторов 1 и 2 образованы соединенными встречно-попарно транзисторами 3, 4 и 5, 6. Каждый из транзисторов 3-6 шунтирован одним из диодов 7-10. В первую диагональ каждого из мостовых инверторов 1 и 2 включена соответствующая фаза 11 обмотки якоря синхронного двигателя. Электродвигатель содержит также трансформатор 12, основная обмотка 13 которого имеет вывод средней точки, Начало этой обмотки подключено к первому выводу 14 второй диагонали мостового инвертора 1, а конец обмотки 13 - к первому выводу второй диагонали мостового инвертора 2. Вторые выводы вторых диагоналей каждого из мосговых инверторов 1 и 2 подключены к общей шине 15 управляемого вентильного электродвигателя, Вентильный электродвигатель включает также датчик 16 положения ротора синхронной машины и дополнительно управляемый ключ 17, включенный между средним отводом обмотки 13 и одним из зажимов источника питания, управляющий вход ключа 17 соединен с выходом ши- ротно-импульсного модулятора 18. Трансформатор 12 снабжен двумя дополнительными обмотками 19 и 20, каждая из котрых выполнена с выводом средней точки. Каждый из мостовых инверторов 1 и 2 снабжен двумя диодами 21 и 22, конденсатором 23, двумя управляющими транзисторами 24 и 25 и восемью резисторами 26-33,
Каждый из первых четырех резисторов 26-29 включен параллельно переходу база- эмиттер одного из транзисторов 3-6 моста. Пятый 30 и шестой 31 резисторы включены соответственно между базами транзисторов 4 и 5, 6 и 3 противоположных плеч мостового инвертора. Каждый из управляющих транзисторов 24 и 25 подключен переходом коллектор-эмиттер параллельно переходу
база-коллектор соответствующих транзисторов 4 и 6, связанных с первой шиной источника питания. Базы управляющих транзисторов 24 и 25 подключены к выходам датчика 16 положения ротора. Начало и конец дополнительной обмотки 19 трансформатора 12 подключены через диоды 21 и 12 v. первым выводам конденсатора 23, седьмого 32 и восьмого 33 резисторов. Вто0 рой вывод конденсатора 23 и средняя точка дополнительной обмотки 19 подключены к первому выводу 14 второй диагонали моста, а вторые выводы седьмого 32 и восьмого 33 резисторов - соответственно ч базам тран5 зисторов 3 и 5, включенных в смежные плечи мостового инвертора и связанны с первым выводом 14 второй диагонали моста.
Средний вывод основной обмотки 13
0 трансформатора 12 подключен к второй шине источника питания через управляемый ключ 17, вход управления которого подключен к выходу широтно-импульсного модулятора 18.
5 Дополнительная обмотка 20 подключена аналогично обмотке 19, но во втором инверторе 2,
Последовательно между вторым зажимом источника 15 питания включен датчик
0 34 потребляемого тока, выход датчика 34 тока подключен через масштабный усилитель 35 к инвертирующему входу компрато- ра 36.
Неинвертирующий вход компаратора
5 36 через резистор 37 подключен к выходу пропорционально-интегро-дифференциаль- ного (П /1Д)-регулятора 38 и через стабилитрон 39 на общую шину 15 источника питания. Инвертирующий вход ПИД-регулятора
0 38 подключен к выходу тахогенерзтора 40 постоянного тока, а на неинвертирующий вход ПИД-регулятора к выходу зздатчика частоты вращения с опорным напряжением ( управления) Uon на выходе. Управляемым
5 ключ 17, инертно-импульсный модулятор 18- и вновь введенные узлы 34-40 представляют собой блок 41 управления вентильным электродвигателем в режиме пуска и регулирования частоты воащения.
0
В рассматриваемом устройстве члюч 17 и широтно-импульсный модулятор 18 реализованы на транзисторах, датчик 34 тока выполнен в виде низкоомного резистора,
5 масштабный усилитель 35 выполнен на операционном усилителе, в котором входными резисторами устанавливается заданный коэффициент усиления, компаратор 36 м ПИД- регулятор 38 реализованы ча операционных усилителях.
Эле ородЕ гател рзбо етепедуюшчм образом
При псщёяе напряжении 1 Ui. от -лсточ- iiiihd MOCifF.iHOK скамнапр :re iha управления Uon на че ч, щи л ыход П11,г,-оегу1 п па 38 (о stiriofs случрэ напряжение упррчпенну 1 сп .«о ож льной по ляочоп/) вал эле i pc,v г-атеч-э начинает врйщзти по сигналам датчика 18 полгже- ниг ротоГ З, котсоые определяю- порядок переключения си ювых транзисторов 3- S мостових инверторов 1 и 2. Бросок пускового от дат ч, ка 24 гоча ус лчзеотся мас- и,-збчык усил-iTir.ctJi 3е) и пост/пает нз неинвертируюшиГ JXOA ком-а атора 36. Одновременно П ИД-регулятор 48 вырабатывает на выхсц0 сигнал положительной полярности мзксиглал чой величины, так как с тахогенератора 40 поступает сигнал на инвертирующий чхоц ПИ/3-рэгулятора, близкий : улю wryi -значительно меньший напряжен1/ упрезвлениг Uon Протекающий ток через зыхоцнуи цепь ПМД регулятора, состоящую из резистора 37 и стабилитрона 39. образует стабильное напряхение на стабилитроне 39.
Напряжение, снимаемое со стабилитрона 39 и поступающее ма неинвертирующий вхоц компаратора 36 является для него опорным При равенстве опорного напряжения и напряжения на неинвертирующем входе, поступающего с да 3 гска, компаратор 36 вырабатывав сигьял низкого уровня, I с помощью широгно-импульсного модулятора 18 и 17 обмотки электродвигателя отключаются оги гс«ника напря- .я постоянного roi а Регулированием коэффициента усьлен лр ..зсилабного усилителя 35 и велич тм непряхеьия стабилизации стабилитрона 39 |Юж.но установить заданную пускового тока, при котором срабатывает компаратор 36. Величина пульсаций токг при пуске электродвигателя определяется только коэффициентом yci/яени ко «.паратора 36 а частота пульсаций ,час пзоекл очеьий) определяемой величиной емкости фильтра источника пнэнчя
Разгон управля°1/с о злек горвигате я о исходиг лр1 г гоян тве по.рабляемо- го оса до часго ы ера1 ieni r1 еала, когда нэпррл чегосторг ог. -о вь:ра5атыва- тчхсгенсратоолм 40, не сравняется с напряжением угравлеы ч Uon. Рассмотрим ральнейи-ую работу устоойс аэ, например, при неизменной йелитлче опорного напряжение Uon. ar только нэпряженме на ин- рертиоуощем входе ПИД-ое1улятора 38 приблизился по вепичиче напряжению Uon, П Д-рс; у -пттр 3G вылабатыв:гь CS-I.HS/I расосгласования дпч управле- (& iaHHOf4 примере при Uon - const для случая стабилизации) частотой вращения ецпа эъа -родвигателя В этой ситуации на- -(.- (, viв с выхода ПМД-регулятора 38 v энм.ьЬ Ся (в предидущем режиме рззго- ё -я1 Ду 15льшого рассогласования по вхо- у с .асмщен, т.е. напряжение на его вьчоце ксимальное), стабилитрон 39 за0 кончается, и напряжение рассогласования чаоез резистор 37 поступает на неинверти- рующий вход компаратора 36 Одновременно -«а ль ьзртирующий вход компаратора 36 про г,ч ет поступать сигнал от s l
5 Окз чере.л асштэбнь«й усилитель 35 Про- исхсд- Т с помощью когмгарзтора 36 сравне- мие потребляемого ВД тока от источника, следовтге/оно, и момента, развиваемого эпектроцзи ателем и напряжения с тахо0 генератора 40 постоянного тока и, таким сбросом. частоты ьращения ЕЗПЗ ВД
В обычных H aecrwi x схемах статиче- го стаб:члизаци11 частоты вращения вала ипи управления огушествляется релейный
5 прмкцмп упоавлечия частотой вращения вала, т.е при достиженич напряжения тахоге- нератсра, разноге напряжению установки (опорное напряжение) электродвигатель отк 1ючаетгя от источника, а ротор продол0 жает движение по инерции. При этом ток, потребляемой от источника равен нулю, а при движении ротора по инзрции частота врашенил взла sasrci T от нагрузки на залу электродвигателя. Как только частота вра5 щения вала понижается до величины, когда напряжение с га.огенеоагора несколько вьь .и опорнс- о, зпекгроденггтель опять подкчючается к исючпику так далее, т.е. зап злектроав /|гателя колеблется при своем
0 врашекии относительно заданной постоянной частоты вращения а ток, потребляемый электродвигателем, пульсируя от нуля до величины определяемой моментом на валу. Еслр необходимо исключить пульсации
5 тока ставят фил ьто, как правило HHfv чтивно-емкостный, между источником и 31 ктролвигзтелем При этом возникает следующая1 ситуация Емкость фильтра должна быть такой, чтобы обеспе0 4tiTL г-еебход/мый к,ипупьсный ток на зклю- ченюм /нтеов ле а величина этого интервала определяется нагрузкой на валу, ее характером, величиной пульсаций напряжения тахогенэратора. В общем случае час5 тота коммутации довольно низкая и емкость фильтра, а следовательно, его размеры, масса и габариты значительны, причем резко растут с увеличением мощности электродвигателя. Повысить частоту коммутации удается в сп.ае применения многофазных
и многополюсных тахогенераторов постоянного тока или модуляцией опорного напряжения сигналом пилообразной формы. Все это усложняет и удорожает привод и, кроме того, в случае динамического наброса нагрузки на валу возникают дополнительные погрешности в режиме стабилизации ввиду квантования при управлении, так как есть моменты времени, когда двигатель не управляется (режим отключения при достижении частоты вращения вала, при котором напряжение на тахоганераторе равно опорному).
Совершенно иное положение в рассматриваемом устройстве. ПИД-регулятор 38 усиливает сигнал рассогласования между опорным напряжением Don и напряжением тахогенератора 40, вводит необходимую производную и интеграл в сигнал ошибки. Этот сигнал ошибки по частоте вращения, преобразованный ПИД-регулятором, поступает как опорный на неинаертирующий вход компаратора 36. Так как на инвертирующий вход компаратора 36 поступает сигнал по току от датчика 34 тока через масштабный усилитель 35 (а это информация по моменту), то ключ 17 через широтно- импульсный модулятор 18 осуществляет импульсное регулирование потребляемого тока строго в соответствии с сигналом ошибки ПИД-регулятора 38. Причем пульсации потребляемого тока определяются коэффициентом усиления компаратора 36, который автоматически выбирает частоту коммутации в соответствии с величиной емкости фильтра. Осуществляется токовое регулирование (т.е. инверторы 1 и 2 работают
в режиме источников тока) частотой вращения вала с минимально возможными пульсациями потребляемого тока. При этом амплитуда пульсаций тока зависит от величины емкости фильтра в значительно меньшей степени, чем при релейном регулировании частоты вращения вала. Формула изобретения Управляемый вентильный электродвигатель по ав.св. Мг 1458961, отличающий р я тем, что, с целью повышения КПД и надежности путем снижения пульсаций потребляемого тока и ограничения бросков пускового тока, введены датчик тока, включенный между вторым зажимом источника питания и общей шиной управляемого вентильного электродвигателя, масштабный усилитель, компаратор, последовательно соединенные резистор и стабилитрон, пропорционально-интегродифференциальныйрегулятор, задатчик частоты вращения и та- хогенератор постоянного тока, установленный на валу электродвигателя, выход которого подключен к инвертирующему входу упомянутого регулятора, неинвертирующий вход которого соединен с выходом задатчика частоты вращения, а выход - со свободным выводом резистора, точка соединения второго вывода которого и катода
стабилитрона подключена к неинвертирующему входу компаратора, инвертирующим входом соединенного через масштабный усилитель с выходом датчика тока, выход компартора подключен к входу широтно-импульсного модулятора, а анод стабилитрона - к общей шине управляемого вентильного электродвигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый вентильный электродвигатель | 1988 |
|
SU1577002A2 |
| Стабилизированный преобразователь постоянного напряжения | 1990 |
|
SU1728950A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С НЕУПРАВЛЯЕМЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2067352C1 |
| Устройство для управления и защиты преобразователя | 1986 |
|
SU1403281A2 |
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Стабилизатор переменного напряжения | 1986 |
|
SU1365057A1 |
| Стабилизированный конвертор | 1978 |
|
SU748721A1 |
| Вентильный электродвигатель | 1983 |
|
SU1150725A2 |
| Управляемый широтно-импульсный модулятор | 1987 |
|
SU1614108A1 |
Изобретение относится к электротехнике и может быть использовано в качестве привода вентиляторов и гидронасосов с не12 ,19 г | йг .Srwv л прерывной работой в системах, в которых отсутствует возможность проведения регламентных работ. Целью изобретения является повышение КПД и надежности путем снижения пульсаций потребляемого тока с ограничения бросков пускового тока, С этой целью в управляемый вентильный электродвигатель введены датчик 34 тока, включен- ный между соответствующей шиной источника питания и общей шиной 15 и блок 41 управления широтно-импульсным модулятором 18 На вход блока 41 управления поступают сигналы с выхода датчика 34 тока и выходов токогенератора 40 постоянного тока и задатчика частоты вращения. В результате осуществляется токовое регулирование а зависимости от ошибки частоты вращения. 1 ил. .20 л г сл с п 3 о ч| О сл к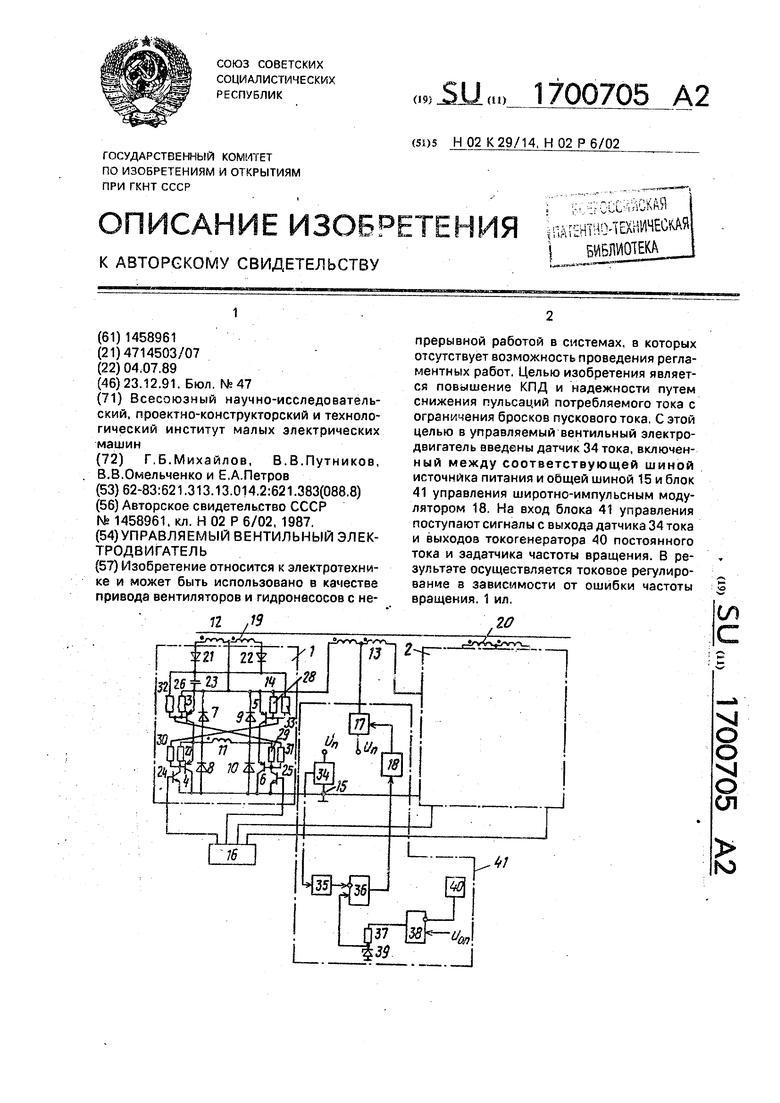
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
