индикации ,.:мии г онтролг.руег/нх пг.ра- мотрое Среды и состоя1 / одного -0 :р;п: 1- тельного вод о а пГ) р; i с г о с р г а ч а центрального Or огд упг. с но м.-мы;
На фиг. - - ГфИМ .ПП . / ьЧРЯ ЭЛО .Тр1-: 7
схема д-- 1 /1 .местной йглоиагнки одного исполнительного одоззпор1 юго ог/гз- на.
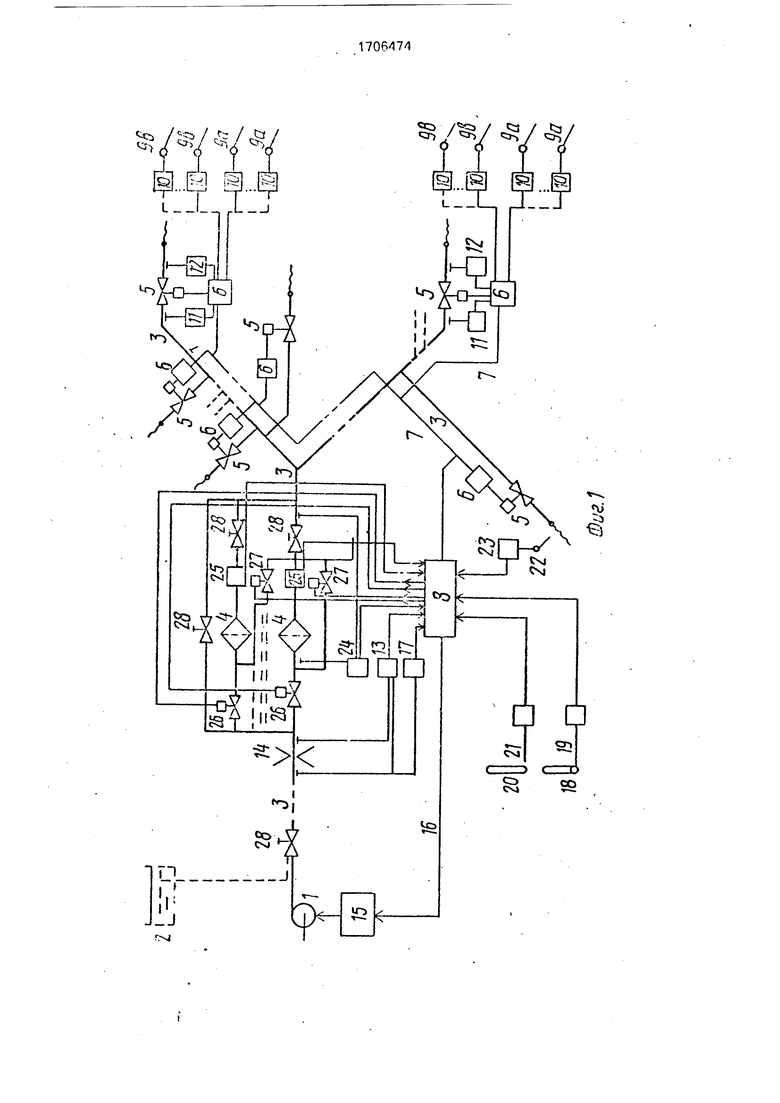
Нйгюрнз о;;- с. тслы: я систем . 1)
ВКЛ ОЧЗСТ НЗСОСНУЮ СТАНЦИЮ 1 ДЛЯ ПОДУЧИ
воды из водохранилищ 2 з распределительный Tf. ЗОГ.рОСС/1 3 С фИЛЬТрЗМН 4 ИЗ
входе. Пол-..-- участке осуществляется ч-э- ре запорные 5 с 6л ока - .и б местной автоматики. связанными проводными лини- ями 7 связи с центральным блоком S управления. К блоку 6 местной автоматики подключены датчики 9 влажности почвы с пороговыми устройствами 10 и пороговое датчики давления 11 до запорною органа и 12 после запорногооргана. К центральному блоку 8 управления пелключен датчик 13 расхода с первичным измерителем 14 (чувствительным элементе ;- также и оде. и с тема 15 управление нзсосмыми агрегатами с помощью линии 1C связи и датчик 17 давления. Кроме того, к центральному блоку 8 управления подключи датчик 18 темлерз- туры воздуха с пороговым элементом 19. датчик 20 влажности воздуха с пороговым элементом 21. аналоговый датчик 22 осадков с порогосым элементом 23. датчик 24 перепада давления а фильтре (при одном фильтре:) и датчик 25 скорости водотока (при нескольких фильтрах). Для промывки ф и;;ь- тров служат напорите запорные opraf t; 26. слионь С 27 и ручное гндрозадпижк.и 25.
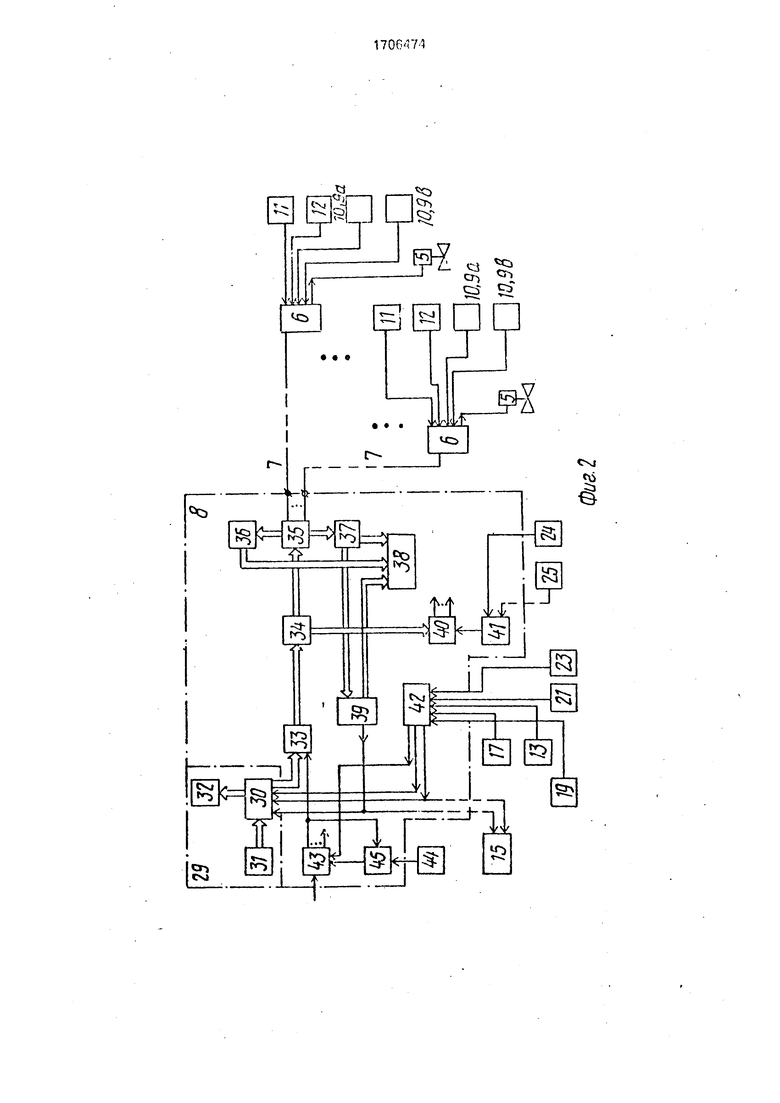
Система упр зленмч А,г. 2) состоит из программируемого контроллера (таймера 29, состоящего из микроконтроллера (микро прсцессорэ) 30 с памятью, клавиатуры 31 и блока 32 ц;.фросой индикации, соединенных с микропроцессором. Управляющие выходы микроконтроллера 30 соединены с входами блока 33 выбора режима работы, выходы которого подключены к входом блока 34 автоматической коммутации цепей: управления v. контроля. Выходы блока 34 соединены с входами блока 35 гальванической развязки цепей управления и конгро- ля, первые выходы которого соединены с проводными линиями 7 связи, а счорые ьы- ходы - с входзг-ги Плог з 6 по| огопых и логических ЭЛРМЙНТОБ для формирог.лн. ч сигналоа состояния .тельных вод;- запорных органов, а третьи - с входами
блокчЗ.
мироплния i:.i ,rHn/iOL з.. |длчно; и
нижнего увечим-1 ;,,; : H;.;nii почвы KOHI ро. -и- руемих yi:ici i;ou. 5ых(. р
сыхо;:.-; илх жп /., сосд|--s -. с. r-,o;in(-ui o/ic
Кс . O ir1 : f..- ...-H и I-i дик ЦПН СОС ГОЯ: /. 1 Г -; - рОЛИ| у{;МЫХ . ; .-Г 1C. . Enopui. s t XC ;1.блокз 07 СС;Г;Д 1 ,.(Л С Ji ..i 1/1 о ..г S- :Т0- ги1: с с к ого ймпл и ..ч со/.тоям; д- -т п-оп .нг:с1п почвы. KOHvrofis-py-nii,- сч1 н -г - hiiu i ypOiiCMb. выходы кс:к.,;:г to coc- диноны с блоком 38 c fjiou 1/ пмди;;Л ;.ии. а
ВТООПг ПЫХСД - С ОД НИ Г.: ИС ЬХГ ДО 1 .:K.-1
м1;кроконтрол,м |. Л 30. Вюрь -з г:ых:.ды 0;. ж 3-1 йвтсмагической цепей управления - ко;:тоопя соо,ч 1нг:п - с .м: 1 входами блока -1C Эьтог1; тиче .кого управления промыикой фильтрог очистки па-и г.; ой соды. Пн состоит из тат/.ерз и злемонтоБ коммутации цепей управления исполнительными всдоюпсрными органами V.G с. 27. Вторые входь; бло.а 40 соодимоны с выходом блока 4 1 Формирования порс/сяых сигналов от датчике 24 перепаде ..ьлечий из фильтре или датчиков 25 скорое и-; ьодосто- ка.
Сигнальные выхо/ibi датчика 13 температуры поздухз через пороговый элемент 19. датчика 13 расхода п -ды, датчика 17 дапле .п поды на с.ходе орпсительпой сети, датчикл 20 вло.ност л воздуха черес г орсго- вый элемент 21 и датчика 22 осад оа через noproH .iii элемент 23 подключаютсч к 5/т о к у 42 фсрмиросзния горогосн:: сигнл/.оз установленных знзчг-ний указанных ,;. «т- ров. которЬ е ло(ически обье/ иняютс.--1 и подаются на входы npc-. и йлпуска микроконтроллера ЗП упрсиления и р подсистему 1о азтома ,гическогс уп();шленн- работой насосных srpcTfjioK. а также °. блок 3 питания для блс..;иро:;.ки электропитание. Э/iCKiрог,,мание онглемы являет СР
как
от С л о к а
Г1 И Т « г И Я .
подключаемого к сети перемет;. токэ, так и от автономного источника 44 j/ierrpo- питйния, подключаемого чкрез 45 as- томат1/, переключения.
Принципиальноя электрически схема цепей коммутации сигналог. управления, контроля и индикации контролируемых параметров среды обитания и состояния одного исполн / тельнс ги ьодозллормого органа центрального Ьлокз В управляющий системы (фиг. 3) состоит из входного чг,10ча, со- Cipanrioro на транзисторе VT1. размещенного в блоке 34, вход КОТОРОГО соединен с центральным ::онтн;тс-.;. 1 переклю- .чателя SA1-1 б..ох.- 33 выбора режима pafj-ттп. один коп-;.:тг .т : i;nor.;i: о соединен с
..:.; НОПрЛЖеПи:. U 1 НС ПОСрСДСТ BCIIHO. it
:- OHTf;i; r , с той ;;з UIHMOH U i ч-;;:ез п/н- .ьн- лющнй контакт , ш ixc/iHC1ГО K l:u4fi t/iikpOrsOiiТpO.-Ti.eрЛ 30. ( КО МСКТСр
нуто :,i:iiu VT1 BK itj it.-H. j с;5;..01.чо реле Ki блока 34. Выходной минусовый контакт линпи 7 питания электропривода водоззпор- ниго органе; -U соединен с тиной - U2 иг точникз 43 птанир непосредственно, а плюсс;с.д онтакт + U2 соединен с резистором Р1 35 второй иь Г-од которого соединен с входами оптроноп VDG и VDS бг,о:сз 35. к,, ;-м диода VD1.. одним выходом оптрс а V03 и выводом резисторз R3. Анод дно,ст VD12 ссг динои с обмоткой perie, КЗ блока 34 I- шунтирующим се резистором R2. R-.орь с ЗЫЗОДУ обмел п реле КЗ соединены с зомьп .ающим контактом К1-1 и анодом Д - .одз VD1. второй Bi/зод контакта К1 -1 соединен с центральным контактом переключат «ля SA1-2, один рысод которого сое- дине и с шине.4. +U2 источника 43 питания непоср дг.тгек:-;о, а второй - чзрез размыкающийся контакт 47 порогового элемента контроля рзс/одэ еоды блока 42. Пэрал- лелт.ио с кснто. ом 17 включен резне гор R9. катод д;;с,п2 VD соединен с шиной источ- Hi.;-л -1 чэр0. оомотку реле К2 блока 35 Вт ;. ---ос-д р -зисто;;. R3 со длнен с первым входе - гптропя VD3 б/;окэ с катодом т о;-. ..--: VD2 Г.чока 38. анод хг орс- через о-пмы1 - :;. контакт К1- 3 сссд -ll L --I иг: о .;. ючника +U1. С по- сг.еднг, ; здинег) также второй выход оптронэ VD3, второй вход которого соединен через рез-.стор R4 с шиной -U1 и с входом инвертора D3:1, выход которого соединен с входом ключа VT2 блока 37. Выход ключа на транзисторе Т2 соединен с одним входом схемы ИЛИ D4-1. выход которой соединен ее счетным РХСДОМ триггера D2 блока 39. оых од ; .отооого соединены с сходами схемы ИЛИ 04-2 Выход последней через резистсг) пБ соединен с катодом сче- тодиода VOr Oi - а 38. анод которого соединен с шиной -11Л. Второй вход схемы ИЛИ D4-1 через замыкающийся контакт КЗ соединен с шиной+U1. Шина - U1 (земля)через размыкающий контакт К1-2 соединена с катодом диода VD4. анод которого соединен с шиной - U2. Первый выход оптрона VD8 соединен с шиной + U2 непосредственно, а оптронэ VD5 - через диод VD7. второй оы- ход оптрона 7D8 соединен с шиной н U1, а его второй вход соединен с входом ключа на транзисторе VT3 блока 36 через инперторы D1-1 и D1-2 и «ерез резистор R6 с шиной - U1. Б коллекторную цепь ключа УТЗ вклю- чен светсдиод VD10. Второй выход оптрона V06 соединен с шиной U1. а его второй вход соединея через инверторы D1-3 и D1-4 с РХСДСМ ключл на транзисторе Т4 блока 36 и через резистор R7 - с шиной - U1. 3 коллекторную цепь ключа VT4 включен саето- диод УГ;9, катод сг.етодиода VD11 гоединен через , гор R8 с ыииой - U1, а его анод
соединен через замыкающийся контакт К2 с шиной + U1.
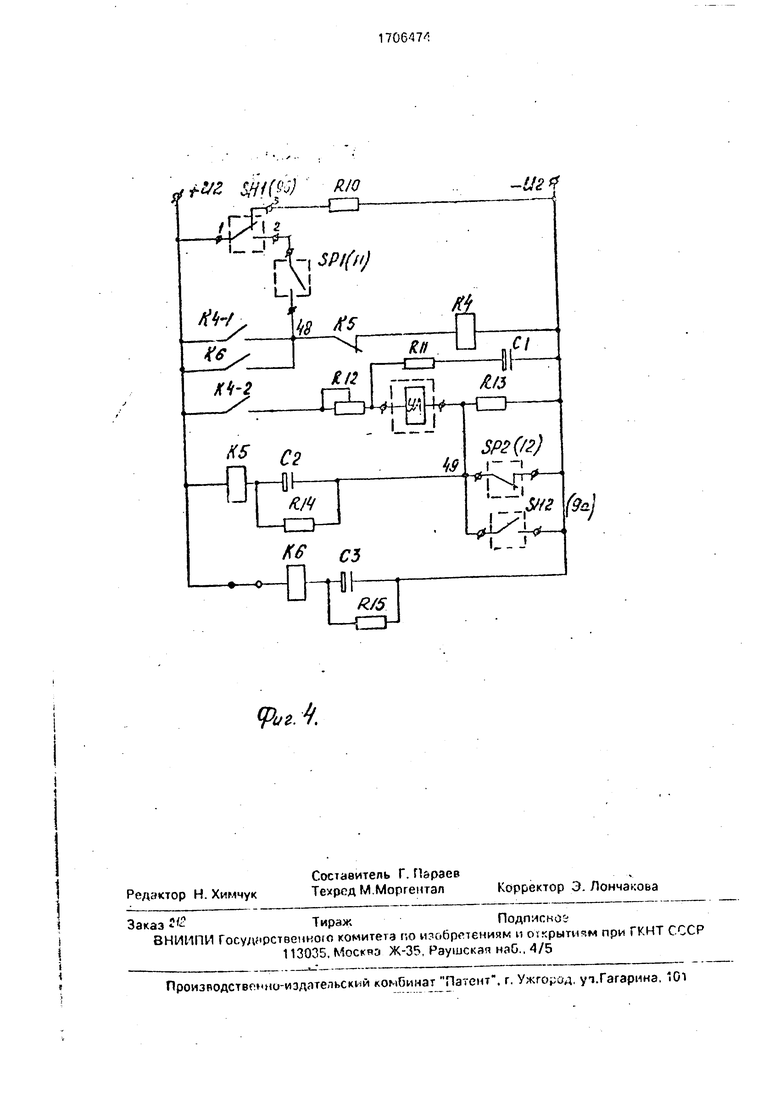
Принципиальная электрическая схема Плока б местной автоматики одного исполнительного содозапорного органа (фиг. 4) состоит из реле К4, един вывод обмотки которого соединен с шиной питания - U2 прог.одной линии 7, второй вывод обмотки К4 соединен через размыкающий контакт реле K j с точкой 48 соединения четей, которая через замыкающий контакт SP1 релейною датчика 11 давления и замь. контакт SH1 датчика 9 нижнего уровня влажности почвы соединена с шинзй- - U2 проводной линии 7. соединяющее выходные цепи центрального блока 8 с соответствующими входами блока б. Точке 48 соединения цепей соединена также с шиной -t U2 через замыкающие контакты реле и реле Кб, шина + U2 через размыкающийся контакт SH1 датчика 9в вла/кности соединена с резистором R10, второй вывод которого соединен с шиной - U2, вывод линии +U2 через замыкающий контакт реле К4-2 соединен с потенциометром R12, второй вывод которого соединен с первым выводом обмотки УА электропривода управляющего запорного органа 5 Мех .ду вторым выводом R12 и шиной V2 последовательно включены резистор R11 и конденсатор С1. Второй вывод обмотки YA соединен с одним выводом резистора R13 и размыкающегося контакта SP2 датчика 12 давления - точка 49 соединения цепей. Эта точка соединена с одним выводом замыкающего контакта SH2 датчика 9а верхнего уровня влажности почвы, с минусовым выводом кс-нденсаторэ С2 шунтированного резисторам R 14. Контакты SP2 и SH2 соединены шино;-. - U2, второй вывод конденсатора С2 через обмотку реле К5, соединен с шиной +U2. Обмотка реле Кб чзрез параллельно включенные конденсатор СЗ и резистор R15 соединены с шиной - U2.
Система управления поливом, реализующая описанный способ управления напорной системы орошения, работает следующим образом.
На каждом поливном участке контролируют установленный заданный нижний уровень влажности почвы с помощью одного или нескольких датчиков 9 влажности почвы (тензиомегрос) и, соответственно, уровень полевой Елзгоемкости с помощью датчик , i 9а с пороговыми элементами 10, сигнальные цепи которых, в сг.учае использования нескольких датчиков дг.я контроля, ют последовательно по два в цепочку a ie- сколько таких цепочек, но не менее двух, соединяют параллельно и подключают к блоку б местной эитомятики. При уровне
влажности почек т-чпе заданного нижнего и них..е урзьпя ролевой с агоомкости /опта кш noporv.Etr/. л г.эктс.з .n/ T-uiroc ЛЕНОСТИ ПОЧВЫ 32ДЙННСГС НИ -;ПОГО /рОР.НГ. SH1
и полевой .ссти SI 12 находятся в состо чии, показанном но фиг. 4.
Пр-1 централизованном управлении и отсутствий управляющего сигнала на соответствующих сыходах блока 8 для дг-.ннои линии 7 управлений и через цели блока 8 и блока 5 собирается цепь контроля заданного нижнего уровня влажности почвы для данного у-;;стка: (ЧМ) - (К1-3) - (VD2) - (R3) - (R1) - (ЧГ2, - (SH1)1.3) - (R10) - (-U2) - (VD4) - (K1-2)-(-U1), при этом на коллекторе транзи- стора VT2 будет единичный уровень напряжения, а через светодиод VD2 будет протекать ток и последний будет светиться. При снижении уровня влажности почвы до заданного нижнего, указанная цепь кочтро- ля разрывается контактом SH1 и единичный уровень на коллекторе VT2 исчезав, что воспринимается микроконтроллером 30, ка сигнал запуска, и управляющая система переходит в рабочий рея им. т. е. о режим полива данного участка, соответственно запускается и водоподаю -даятюдсистемй.
При давлении еоды на входе оросительной сети, контролируемом датчиком 17 давления, выше установленного значения через блок 42 будет снят сигнал прерывания (запрета) с соответствующего входа прерывания микроконтроллера 30, который начинает работу в соответствии с записанной в его памяти программой и дает управляю- щий сигнал на ключ на транзисторе Т1 через свой замыкающимся контакт 45 и замкнутый контакт переключателя SA1-1 блока33 выбора режима работы. При открытом ключе VT1 блока 34 срабатывает реле К1 и своим замыкающимся контактом К1-1 включает напряжение от источника U2 в линию 7 управления исполнительным во- дозапорным органом 5. а также размыкаю щимнся контактами К1-2 и К1-3 разорвет цепь контроля заданного низкого уровня влажности почвы данного участка. В центральном блоке 8 управления, при подаче напряжения U2 на вход данной линии 7 управления, сработает цепь контроля наличия управляющею напряжения (+U2) - (VD1) - (К2) - (-U2) и, соответственно, цепь его индикации (+U1) - (К2) - (VD11) - (R8) - (-U1).
При этом ., г)локе 6 местной автоматики сработают кратковременно реле К5 и Кб, причем племя отпускания реле К5 меньше, чем реле; Ко, так как R14 R15. поэтому КОНТЕКТ pr-лр КБ замыкается раньше, чем отпустит контакт Кб. Это оСкч-,печи,зег за- мыкание цепи (Ш2) - (Кб) - (К5) - (К-1,-) - (U2) и
срчбатыа ние К-1. :. оторее сгмоблокируется СьО ..м комгактсг.. Л 1. ; ко.; (актом К4-2 подключит обпотку слоктропр.MI /АЙ Y/ y; p:;r;ЛЛЮЩегО 32Г1ОПМОГО ОрГс:Я: 5 . ЛИНИИ
упрзцлен я, coTOjiav- и состог.иг нагрузку данной линии. Г(ри зтоь; в цент ра-а.ном с.чо- ке 8, на рэзииторе R1 оОрозустся капрллслния U3, коюрое npnj.a : et-;o к сходным цепям оптроноу VDG и VDB, ссущестс- ляюил х гальваническое разделение цепей упрэсле-Ш Я и цепей контроля. При включении обмотки электропривода YA на резисторе К 1 образуется падение напряжения U3, достаточнее для отпирания иыходны/. цепей оптронов VD6 и VD3, при этом открываются на транзисторах ключи N13 и VT4 и спетоди- рды VD9 и VD10 светятся, CHI чэлизируя подключение обмотки YA к линии управление. Когда основной клапан откроется, полисная сеть наполнится содой и давлений в ней. контролируемое датчиком 12 давления, поднимается до установленного значения. Кон- таг.ты SP2 датчика 12 разомкнутся и в цепь обмотки YA п блоке G включится дополни- тепьный резистор Р. 13. При этом ток нагрузки уменьшится и. соответственно. Мепьшитсм падение напряжения Ь З на резисторе R1 и оптрон VDG закроется, соответственно закроется ключ VT4 и светодиод VD9 погаснет, что озна - ает открытие управляемого водоззпорного органа к наличие необходимого давления о полисной сети.
При данном режиме работы исполнительный водонапорный орган будет находиться БЭ включенном (открыто;.,) состоянии в течений времени, записанного в-прсгром- му микроконтроллера 30 для данного полипного участка. В этсм случае возможны два режима работы, первый, когда второго датчика ОЛЗХНОСТИ ПСЧОЫ Si-2, КОНТрСЛИруЮ- ЩеГО ypOL Ci-1 и полевой слагоемкости, нет. В этом случае исполнительный водозапорный орган будет закрыт по истечении заданного программой отрезка времени путем снятия микроконтроллером 30 управляющего напряжении, размыканием контакта 46 и соответствен,to К1; во втором случае, когда датчик влажности почвы SH2 установлен, при достижении почвой уросгя влажности, равной максимальной полевой влагоемко- сти, последний (один датчик влажности SH2 или хотя бы один из нескольких) срабатывает и своим замыкающимся контактом SH2 замыкает цепь (-I-U2) - (К5) - (С2) - (SH2) - (-U2) е блоке 6. В результате этого реле КГ сработает и своим размыкающим контактом КГ разорвет цепь питания pt-ле К-1, которое через время, обуслспленной цепочкой задержки R11-C1, локально отключит от линии управления обмотку YA электропривода упрзсляющего запорного оргг;к:. 5, соответственно зйкрошся и основной иодоззпорный клапан, вокальное отключение электропривода упр П,ляюа ,го запорного органа 0 может бшь осуществлено в любой момент на протяжении с..сго рабочего цикля в случае, если давление е полисной сети, контролируемое датчк;см 12 давления, снизится ниже установленного продола и, соотастстпснсс, замкнется его контакт SP2.
Таким образом, положенной режим работы управляющей системы обеспечивает жесткое цемтрглизованиое управление (по заданной прс: рамме) при отсутстпии датчиков влажное ;и почвы, а такое центра- лизоеанное управление по состоянию датчиков влажности почвы, контролирующих заданный нижний уровень SH1 с отключением по истечении заданного времени полива (датчик влажности почвы SH2 отсутствует) и централизованное управления по состоянию датчиков влажности почвы SH1 с отключением управляющего запорного органа 5 локально по состоянию датчиков влажности почвы SH2.
Локальное отключение (закрытие) водо- запорных клапанов выполняется в любом случае при срзбэтысэнии датчика 12 давления (SP2).
Локальное управление врдозапсрными органами осуществляется через схему блока 6, датчиков 9в, 9а влажности почвы и их пороговых элементов 10 и датчиков 11 и 12 давления воды, цепи которых подключаются к блоку 6, при этом данная линия управ- ления постоянно подключается к источнику управляющего сигнала.
8 этом случае в центральном блоке 8 микроконтроллер (таймер) 30 запускается п программе длительного включения всех уп- равляющнх линий 7 и выполняет только общесистемные функции контроля и защиты.
При наличии управляющего напряжения U2 на входе схемы блока б и наличии сигналов с соответствующих датчиков, управляющий клапан 5 будет включаться локально замыкающимся контактом SH1 датчика 9 заданного нижнего уровня влажности почзы при условии наличия нужного давления воды в распределительной гид- равлической сети перед водозапорным органом, контролируемым датчиком 11 давления (замыкающийся контакт SP1). Отключение управляющего клапана также произсодится локально аналогично изло- женному выше. т. е. замыкающимися контактами SH2 или SP2.
Расход поливной воды оросительной сие/смой во всех режимах работы контролируется датчиком 13 расхода, предельные установленные уровни которого фиксируются блоком.42, (жгнйлы которого воздействует на охо/ды прерывания микроконтроллера 3 и подсистему 15 управления оолоподпощсй полсистемы.
При локальном управлении водозапор- ными органами, что необходимо при выращивании некоторых сельхозкультур, запорные органы на входах этих поливных умастко;; включаются и отключаются случайно в соо П егсти ш с внешними услопийми и характером изменения влажности почвы. . Росхсп, волы оросительной системы контролируется централизованной в случае достижения им установленного номинального значения, блоком 42 формируется сигнал блокировки включения дополнительных во- дозапорных органов на других полив) ых участках, который реализуется размыкающимся контактом 47. В результате этого в цепь шгания управляющих линий подключается резистор R 9, и напряжение питания снижается до уровня 1)2/2, этого достаточно, чтоты удерживать во включен.-ом состоянии уже включенные электроприводы YA запорных органов 5. но недостаточно, чтобы включить новые. В случае достижения расхода воды установленного максимального или нулевого значения, блоком 42 форомк- руется сигнал прерывания (запрета) работы микроконтроллера в любом из перечисленных режимов работы управляющей системы и последнее переводится в дежурный режим. Этим же сигналом подсистема 15 во догэдачи переводится в режим аварийный останов. Автоматический перевод управляющей системы из дежурного режима в рабочий осуществляется. так,, сигналами поро овых элементов 19 или 21 контроля температуры или влажности еоздухз соответственно, сформированными блоком 2. np-i достижении установленных значений температуры или влажности воздуха, аналогично изложенному, т. е. подачей единичных уровней на соответствующие входы микроконтроллера и снятия блокировки. Автоматический перевод управляющей системы и подсистемы всдоподачи из рабочего режима, т. е. режим выполнения программк полива в дежурный осуществляется пороговым сигналом, сформированным блоком 42 при достижении выходным сигналом датчика 22 контроля осадховустановленного значения, путем воздействия последнего на один из входов 1 ерывзния микроконтроллера 30.
С помощью переключателей SA. расположенных к блоке 33 (фиг. 2). можно осуществить переключение линий управления и цеп и контроля с автоматического управления но ручное дистанционное управление
водозэпорными органами или еообщс оыь-а- сти некоторно учйстки полис.: из рабочего (полипного) рожице. Причем (фиг. 3) KO -f- рольи индикаци 0. псехотмеченных параметров при ручном дкст. 0-ii .ионном управлении сохраняются. При нэлчии дятч/.киь С влажности почвы, на каждом поливном участке, в дистанционном режиме работы г,одо:-;а- порные клапаны могут автоматически отключаться по сигналам датчика 9 ела.юности или датчика 12 дЈ.сленг.я.
Централизованный контроль испрошно- стм датчиков влажности почвы, фиксирующих заданный нижний уровень последней, осуществляется с помощью блоков 35, 37 - 39. В случае централизованного управления водозапормыми органами, сигнал контроле формируется ucMibio контроля нижнего уровня ЕЛс %:;ности почвы с помощью оптро- HS VD3, инвертора D3:1, ключак VT2, схемы ИЛИ-НЕ D4-1, триггера D 2 и схемы ИЛИ-НЕ D4-2. резистора R 5 и светодио- да VD5. В случае локального управления ззпог.ным органом 5, сигнал контроля исправности датчика заданного нижнего уровня влажности почвы формируется косвенно, путем контроля срабатываний управляющего запорного органа 5, так как последний включается пороговым сигналом датчика нижнего уровня влажнеем; ПОЧЕЫ SH-1 (9в) (фиг. 4), с помощью реле КЗ. схемы ИЛИ-НЕ D4-1. триггера D2. схемы И ,-НЕ D4-2. резистора R5 и сесчодиодз VD5.
Дискретные сигналы с. выхода ключа на транзисторе VT2 или реле КЗ подаются на входы схемы ИЛИ-НЕ D4-1. выход которой подключен на счетный вход триггера D2. Если на интервале двух циклов полияэ. на выходе ключа VT2 не будет зафиксировано триггером D2 ни одною перепада логического уровня, значит, соответственно не было изменений и о первичных цепях контроля заданного нижнего уровня влажности почвы или включений электропривода управляющего клапана, следовательно данный датчик нижнего уровня влажности почвы не изменял своего состояния на интервале одного или двух изменений состояний другими датчика1 и,т.е.он неисправен.
При использовании для очистки поливной воды одного фильтра 4. контроль его загрязнения осуществляют с помощью датчика 24 перепада давлений или датчика 25 скорости проток, поды. При использовании нескольких фильтров 4, включенных параллельно, контроль каждого из них осущес в- ляют с помощью датчиков 25 скорости протока воды. Выходы датчиков 24 и 25 соединены с блоком 41 noporot ux „псмептов. При достижении перепада давления на
фильтре выше установленного уровни или скорости протока поды на несл ояьспх фильтрах пкже установленного урог.ня. блоком 41 формируется дис;фйтный сигнаг, запуска блока опюмгр.ичпского уг.рээлснип про- мыы .ой. Последняя состоит из одною изли нескольких таймо.роз. настроенных п.ч дэнноо время, с .выходов которых упранля- ющиь сигналы подаются на закрытие
0 соответстпукзщего рабочего водозапормого органа 26 и открытие с/тизного органа 27. При отсутствии датчиков 2-1 и 2Ь, блока 40 автоматического управления промывкой фильтров запускается каждый pa. L начале
5 цикла полива сигналами упрасления водо- запорными о|.1ганами поливных участков, поступающими в блок 40 с блокг 34.
Б качестве контроллера 29 автоматического управления может быть использован
0 микроконтроллер типа К145 и 1(1907. Его устройство и работа освещены в соответствующих отраслевых руководящих материалах. Клавиатура 31 служит для набора команд программ управления и их ввода ь память
5 микроконтроллера 30, линейный цифровой индикатор служит для индикации вводимых команд при их визуальном контроле и времен;-; выполнения внесенных в программу и последовательно реализуемых команд уп0 раолении.
- В качестзе датчика 17 давления на входе гидравлической сети может быть использован эл- ктрокоптактный манометр или реле давления, в качестве расходомера
5 может быть использован серигл„,. расходомер с аналоговым выходом прсооразо- в а г е л я, на выход которого включен индикатор с контролем установленных значений.
0В качестве датчика температу,.1.у воздуха может быть использован контактный термометр или термосигналпзатор. С г:-.ч;;стзе датчика осадков используется тензонотри- ческий датчик влажности почвы нополизае5 мой площади с аналоговым выходом и индикатором уровня влажности с контролем установленных уровней.
Электропитание системы управления водораспределением, осуществляется от
0 сети переменного тока через блок 43 питания или от автономного источника постоянного тока напряжением 24 В, что позволяет осуществлять установку системы в труднодоступных гороных условиях. ABTOHOMI чй
5 источник 44 электропитания необходимо иметь и в нормальных условиях, но случай исчезновения или кратковременное лере- рыва электропитания, для чего используется СХСУ.Л 45, осуществляющая Псзуллг.ное переключение источников, обеспечиваюидее высокую надежность работы управляющей системы.
Описанный способ об с-чочивзпт более высокую эффективность управления водо- распред лемием за счет реализуемой возможности использования различных режимов упрэьлеммя ; их сочек:;- :- я, а также более полного и достоверного контроля основных параметроа потока воды, состояния оросительной сети, состояния управляемо; о параметра - влажности почин и основных параметров окружающей среды, взаимодействия с водоподзющей подсистемой, что в целом обеспеч . &зет существенное повышение качества полиса и эффективности всей системы орошения. Кроме того, использование способа позволяет сократить до минимума непроизеоди- ;ельные потери времени, обеспечить экономию поливной воды в результате быстрой локализации аварий, повысить надежность и сократить потери рабочего времени на обслуживание и диагностику состояние оросительной системы и гидротехнического оборудования. Все это обеспечит существенный экономический эффект как за счет повышения урожайности орошаемых культур, так и за счет большей экономии воды и сохранения ресурса всего гидротехнического оборудования.
Формула изобретения 1. Способ автоматизированного управления напорной оросительной системой, включающий контроль влажности почвы каждого поличного участка, назначение срока начала полива каждого учьстка при достижении влажностью почвы на нем нижнего заданного уровня, а окончание полмэа - при достиженл. влажностью почвы уровня полевой влагоемкости или по истечении
установленного врпмени полияо, s также
КОНТРОЛЬ ИСПр. ШНОСТИ ДатЧМКОО РЛЗЖНОС |Ц.
отличаю 1.ц и и с я тем. го, с целью повышения эффективности и качества noiИ . Э, осуществляют контроль температуры и влажности аоздуха и полиция осадгпг, по лиоучасткоо починают при достижении температурой или сложностью воздуха критических значений и прекращают при
нглимии оседкоп, контролируют давление и рссход йоды на входо оросительной системы перед фильтрующим элементом и сигнал на открытие запорного органа на входе ,1-ж- дого участка полива подают при наличии
заданного уровня давления и при величине расхода, но препышаюидей заданного, причем после подачи сигнала управления на срабатывание запорного органа но пходз кукого-либо участка контролируют испрзьность линии упрззленип и после оыдерж.си времени на срабатывание запорного органа контролируют его исправность по величине давления за ним.
2. Способ по п. 1, отличающийся тем, что задают количество участков системы, на которых сигнал управления запорными органами на сходе учпст;:з дополнительно корректируют по сигналам
датчика влажности почвы на участке и датчика давления воды.
3. Способ по п. 1, отличающийся тем, что, с целью повышения надежности в работе системы, контролируют величину
давления после фильтрующего элемента и определяют перепад давления us нем и по достижении Данным параметром или величиной расхода установленных значений и о начале каждого цикла полива осуществляют
промывку фильтров.
SA/S/.5
---Й-& 5- g U
feM t
СЧ)
3
I
фи. 4.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля и управления наполнением водой или неагрессивными жидкостями резервуаров | 2024 |
|
RU2838833C1 |
| УСТРОЙСТВО ПОЖАРНОЙ СИГНАЛИЗАЦИИ ДЛЯ БОРТОВОЙ СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПОЖАРОТУШЕНИЯ | 2013 |
|
RU2546328C2 |
| Устройство для автоматического управления поливом при подпочвенном орошении | 1985 |
|
SU1296057A1 |
| БАТАРЕЯ ХИМИЧЕСКИХ ИСТОЧНИКОВ ТОКА | 2010 |
|
RU2450392C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ЛИНИИ УПРАВЛЯЮЩИХ ЛИНИЙ В СИСТЕМАХ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И УПРАВЛЕНИЯ | 2014 |
|
RU2618793C1 |
| ПРИБОР ДЛЯ ПОДРЫВА ПИРОСРЕДСТВ | 2015 |
|
RU2606265C1 |
| РЕЛЕ ВРЕМЕНИ ПОДРЫВА ПИРОСРЕДСТВ | 2014 |
|
RU2572854C1 |
| ПРИБОР ДЛЯ ПОДРЫВА ПИРОСРЕДСТВ | 2015 |
|
RU2610610C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ РАБОТЫ ЛИФТА | 1992 |
|
RU2006438C1 |
| Устройство дифференциальной защиты | 2021 |
|
RU2780658C1 |