Изобретение относится к измерительной технике, а именно к образцовым средствам измерения, предназначенным для поверки тензометров линейных перемещений и датчиков деформации,
Известны калибраторы для поверки датчиков деформации, содержащие корпус, подвижный измерительный стержень, неподвижный измерительный стержень, цифровое отсчетное устройство. Недостатками известных калибраторов являются недостаточная точность измерений, вызванная субъективными ошибками оператора и недостаточная производительность поверки, так как подвижный
измерительный стержень перемещается поточечно вручную.
Известен также калибратор для поверки датчиков деформации, содержащий корпус, подвижный измерительный стержень, неподвижный измерительный стержень, датчик линейных перемещений, корпус которого соединен с корпусом калибратора, а подвижная измерительная линейка соединена с подвижным измерительным стержнем. Недостатками этого калибратора являются недостаточная точность измерения, вызванная тем, что направляющие подвижного измерительного стержня калибратора и датчика линейных перемещений выполнены в различных корпусах и поэтому параллельность их практически не обеспечивается, недостаточная разрешающая способность, вызванная тем, что с увеличением разрешающей способности у датчика линейных перемещений резко уве- личиваются габаритные размеры и масса калибратора, а также недостаточная производительность поверки, так как подвижный измерительный стержень перемещается поточечно вручную.
Целью изобретения является повышение точности калибровки и расширение функциональных возможностей путем обеспечения оценки инерционности поверяемых электромеханических тензометров.
Поставленная цель достигается тем, что тензокалибратор снабжен отжимной пружиной{ одетой на подвижный измерительный стержень и опирающейся на выступы, выполненные на подвижном и неподвижном измерительных стержнях, электрическим датчиком угловых перемещений и муфтой, выполненной в виде пары одинаковых параллельных плоских пружин зубчатой формы с числом зубьев не менее трех, планок, которыми жестко связаны концы противолежащих пар зубьев плоских пружин, и изогнутых пластинчатых пружин, поверхности наименьшей жесткости которых перпендикулярны плоскостям наименьшей жесжкости плоских пружин и концами которых связаны по кругу соседние планки, датчик угловых перемещений установлен в корпусе соосно своей выходной осью микрометрическому винту и жестко соединен этой осью с центром одной из плоских пружин муфты, а центр второй плоской пружины муфты жестко соединен с микрометрическим винтом, н который с противоположной стороны опирается подвижный измерительный стержень.
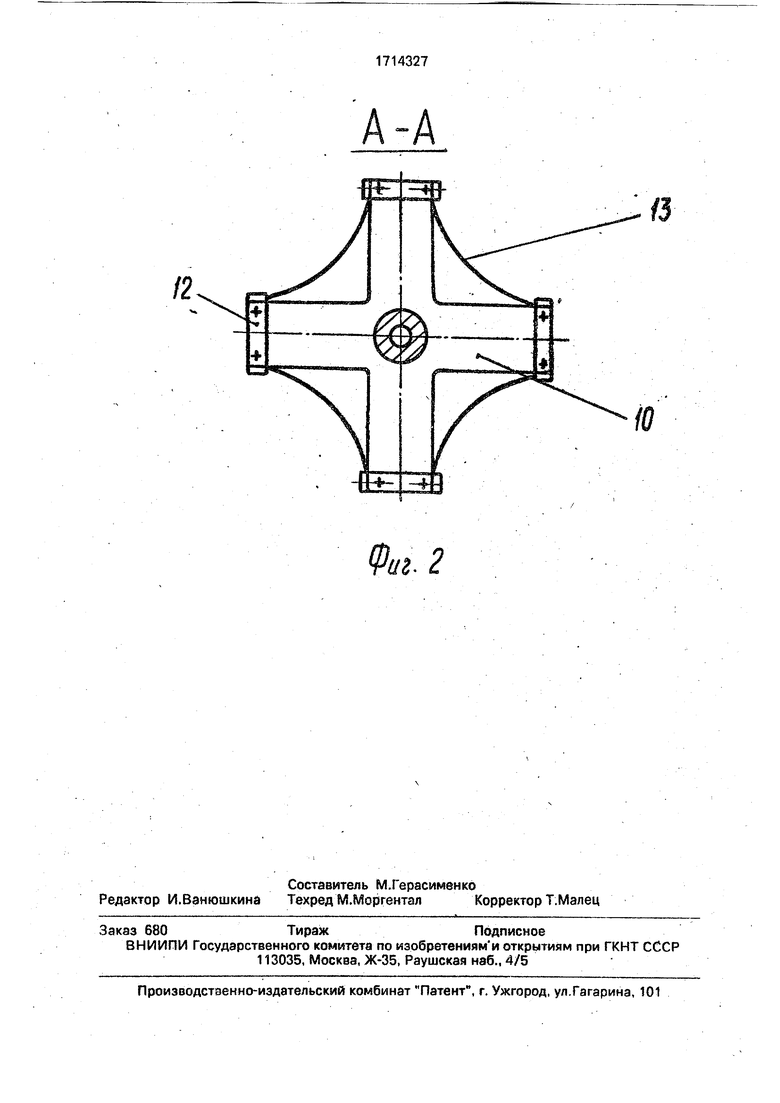
На фиг. 1 показан тензокалибратор, общий вид, разрез, на фиг.2 - разрез А-А на .фиг,1.
Тензокалибратор содержит корпус 1 с установленными в нем соосно неподвижным измерительным стержнем 2, микрометрической головкой 3, установленной в направляющей неподвижного измерительного стержня 2, и электрическим датчиком угловых перемещений 4.
В сквозном отверстии неподвижного измерительного стержня 2 коаксиально с возможностью продольного перемещения установлен подвижный измерительный стержень 5, подпружиненный пружиной 6 к измерительной поверхности микрометрического винта 7. Отжимная пружина 6 одета на подвижный измерительный стержень 5 и опирается на выступы аи б, выполненные
на подвижном и неподвижном измерительных стержнях. Датчик угловых перемещений 4 установлен в корпусе 1 соосно своей выходной осью 8 микрометрическому винту
-7,
Микрометрический винт 7 и датчик угловых перемещений 4 соединены 9, выполненной в виде пары одинаковых параллельных плоских пружин 10 и 11 зубчатой формы с числом зубьев не менее трех (на фиг.2 показано4 зуба), планок 12, которыми жесткр связаны концы противолежащих пар зубьев плоских пружин 10 и 11 и изогнутых пластинчатых пружин 13, плоскости наи5 меньшей жесткости которых перпендикулярны плоскостям наименьшей жесткости плоских пружин 10 и Ни концами которых связаны по кругу соседние планки 12. Выходная ось 8 датчика угловых перемещений
0 4 жестко соединена с центром плоской пружины 11, а центр второй плоской пружины 10 жестко соединен со вторым концом микрометрического винта 7.
Электромеханический привод 14 состоит из червячного колеса 15. червячного вала 16, электродвигателя 17, соединенного с червячным валом 16 муфтой 18. На втором конце червячного вала 16 установлена рукоятка 19. На конце подвижного измерительного стержня 5 установлена втулка 20 для установки поверяемого тензометра или датчика деформации 21.
Тензокалибратор работает следующим образом.
5 Поверяемый тензометр 21 устанавливается на опорные поверхности неподвижного измерительного стерхшя 2 и втулки 20. При вращении червячного вала 16 от электродвигателя 17 или вручную рукояткой 19
0 через червячное колесо 15 приводится во вращениеось 8 датчика угловых перемещений, и через упругую муфту 9 приводится во вращение и поступательное перемещение микрометрический винт 7, который перемещают подпружиненный подвижный измери-. тельный стержень 5 с втулкой 20, являющейся подвижной опорой тензометра 21.
Отсчет показаний величины перемеще0 НИИ подвижного измерительного стержня 5 производится, например, по блоку цифровой индикации 22 в соответствии с электрическими сигналами датчика угловых перемещений 4, пропорциональными перемещениям подвижного измерительного стержня 5. Cpjзвнeниeм показаний поверяемого тензометра 21 с показаниями блока цифровой индикации 22 определяется погрешность поверяемого тензометра. Сравнением синхронно записанных временных диаграмм перемещений подвижного измерительного стержня 5 и выходного сигнала тензометра 21 (при работе с электроприводом) с результатами статической поверки на дискретно заданных уровнях перемещений (при работе с ручным приводрм) оценивается динамическая погрешность поверяемого тензометра при заданной скорости деформации, т.е. его инерционность,- . Предлагаемый тензокалибратор был экспериментально проверен на макете, выполненном плоскопараллельными концевыми мерами длины с использованием в качестве нуль-индикатора измерительной головки 1 ИГ. Результаты поверки показали, что предлагаемый тензокалибратор имеет незначительную погрешность и удовлетворяет требованиям ГОСТа. Ф о р мула изобретения 1. Тензокалибратор. содержащий микрометрическую головку, корпус с неподвижным измерительным стержнем и подвижный измерительный стержень, размещенный в сквозном .отверстии неподвижного измерительнопо стержня с возможностью продольного перемещения и взаимодействующий с соосным ему микрометрическим винтом головки, о т л и ч а Ющ и и с я теМ, что, с целью повышения точности калибровки, он снабжен отжимной пружиной, надетой на подвижный измеП IS. рительный стержень и опирающейся на выступы, выполненные на подвижном и неподвижном измерительных стержнях, электрическим датчиком угловых перемещений и муфтой, выполненной в виде пары одинаковых параллельных плоских пружин, зубчатой формы с числом зубьев не менее трех, планок, которыми жестко связаны концы противолежащих пар зубьев плоских пружин, и изогнутых пластинчатых пружинг плоскости наименьшей жесткости которых перпендикулярны плоскостям наименьшей жесткости плоских пружин и концами которых связаны по кругу соседние планки, датчик угловых перемещений установлен в корпусе соосно своей выходной осью микрометрическому винту и жестко соединен этой осью с центром одной из плоских пружин муфты, а центр второй плоской пружины муфты жестко соединен с микро1 етрическим винтом, на который с противоположной стороны опирается подвижный измерительный стержень. 2. Тензокалибратор по п.1, о т л и ч а ющ и й.с я тем, что, с целью расширения функциональных возможностей путем обеспечения оценки инерционности поверяемых электромеханических тензометров, он снабжен электромеханическим приводом, кинематически связанным с выходной осью датчика угловых перемещений. И JА-А
/2

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ ДАТЧИКА ИЗМЕРЕНИЯ МАЛЫХ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2510487C1 |
| Тензокалибратор | 1988 |
|
SU1580145A1 |
| УСТРОЙСТВО для ТАРИРОВКИ ТЕНЗОМЕТРОВ | 1971 |
|
SU298847A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЕНЗОМЕТР | 1990 |
|
RU2025654C1 |
| АВТОМАТИЧЕСКИЙ КАЛИБРАТОР КАНАЛОВ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ СОПРОТИВЛЕНИЯ ТЕНЗОРЕЗИСТОРОВ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 2019 |
|
RU2724450C1 |
| ТЕНЗОКАЛИБРАТОР | 1966 |
|
SU189590A1 |
| Клиновой прибор для поверки тензометров | 1952 |
|
SU96921A1 |
| МАШИНА СИЛОВОСПРОИЗВОДЯЩАЯ ПЕРВОГО РАЗРЯДА С ДИАПАЗОНОМ ХРАНЕНИЯ И ПЕРЕДАЧИ ЕДИНИЦЫ ОТ 1 кН ДО 1000 кН С ПРЕДЕЛОМ ДОПУСКАЕМЫХ ЗНАЧЕНИЙ ДОВЕРИТЕЛЬНЫХ ГРАНИЦ ОТНОСИТЕЛЬНОЙ СУММАРНОЙ ПОГРЕШНОСТИ 0,02% | 2018 |
|
RU2687296C1 |
| Устройство для поверки датчика линейных величин в гидростатической опоре | 1985 |
|
SU1305524A1 |
| Устройство для поверки электромагнитного толщиномера покрытий | 1983 |
|
SU1112225A1 |
Изобретение относится к измерительной технике, а именно к образцовым средствам, предназначенным для калибровки и поверки различных тензометров линейныхперемещений. Цель изобретения - повышение точности калибровки и расширение фун- кциональныхвозможностейтензокалибратора путем обеспечения оценки инерционности поверяемых злектромехани- ческих тензометров. Повышение точности достигается благодаря наличию электрического датчика 4 угловых перемещений, выходная ось 8 которого посредством специальной муфты жестко соединена с соосным с ней микрометрическим винтом 7. на торец которого с противоположной стороны опирается по- движный измерительный стержень 5, коаксиально размещенный с возможностью продольных перемещений в неподвижном измерительном стержне 2 и подпружиненный отжимной пружиной 6. Оценка инерционности электромеханических тензометров обеспечивается благодаря наличию злект- ромрханического привода в составе данного тензокалибратора. 1 з.п. ф-лы, 2 ил.
Ы 2
| Каталог фирмы МТС (США) "Extensometer and Clip Gage, Catalog" | |||
| Модель, 650.03 | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
