Изобретение относится к области измерительных приборов с визуальным отображением измеряемой электрической величины.
Известен стробоскопический осциллограф, содержащий стробоскопический преобразователь, систему автосдвига, усилители горизонтальной и вертикальной разверток и электронно-лучевую трубку.
Недостатками осциллографа являются сложность и низкая стабильность изображения при воздействии возмущающих факторов.
Наиболее близким к предлагаемому является стробоскопический осциллограф, содержащийстробоскопический
преобразователь, усилители горизонтальной и вертикальной разверток, электроннолучевую трубку и систему автосдвига, вход которой является синхронизирующим входом осциллографа; первый выход соединен через усилитель горизонтальной развертки с первым входом электронно-лучевой трубки, второй выход соединен с первым входом стробоскопического преобразователя, второй вход которого является сигнальным входом осциллографа, а выход через усилитель горизонтальной развертки соединен с вторым входом электронно-лучевой трубки.
Недостатком стробоскопического осциллографа является нестабильность положения изображения на экране электронно-лучевой трубки. Эта нестабильность проявляется в виде медленного смещения наблюдаемого импульса по экрану. Основной причиной этого явления является сильная температурная зависимость параметров смесительного диода. Другими источниками указанного смещения изображения могут служить температурные и дрейфовые изменения параметров генераторов быстрого и медленного пилообразного напряжений и других элементов схемы осциллографа. Кроме того, причиной смещения может служить и реальное изменение положения (во времени) измеряемого импульса по отношению к импульсам синхронизации.
Дрейф изображе,ния по экрану осциллографа приводит не только к ухудшению восприятия и необходимости использования органов управления задержкой импульсов. Взаимное смещение импульсов начала развер ки и измеряемого импульса (нарушение когерентности) затрудняет фильтрацию шумов за счет накопления (измерений, а также последующую обработку, например, с помощью ЗВМ. Таким образом, смещение изображения в существенной степени снижает эксплуатационно-технические характеристики стробоскопического осциллографа.
Для устранения этого эффекта используют температурную стабилизацию смесителя (пассивный метод), различные методы устранения шумов и дрейфов элементов осциллографа, однако все эти методы не обеспечивают достижения желаемого эффекта, поскольку основаны на компенсации с той
0 или иной степенью дестабилизирующих факторов, т.е. основаны на регулировании по возмущению.
Целью изобретения является стабилизация изображения на экране стробоскопического осциллографа при воздействии медленно меняющихся ограниченных по модулю возмущающих факторов.
Для достижения указанной цели стробоскопический осциллограф, содержащий
0 стробоскопический преобразователь, усилители горизонтальной и вертикальной развертки, электронно-лучевую трубку и систему автосдвига, первый вход которой является синхронизирующим входом осциллографа, первый выход соединен через усилитель горизонтальной развертки с первым входом электронно-лучевой трубки, второй выход соединен с первым входом стробоскопического преобразователя, второй вход
0 которого является сигнальным входом осциллографа, а выход через усилитель горизонтальной развертки соединен с вторым входом электронно-лучевой трубки, дополнительно снабжен интегратором, первым и
5 вторым датчиками положения луча, входы которых связаны с экраном электронно-лучевой трубки, а выходы - с прямым и инвертирующим входами интегратора, выход которого соединен с вторым входом систе0 мы автосдвига.
Контур обратной связи производит регулирование по отклонению управляемой величины и, таким образом, осуществляет комг1лексную компенсацию возмущений,
5 На фиг. 1 представлена схем,а предлагаемого осциллографа; на фиг. 2 и 3 - диаграммы, поясняющие его работу.
Стробоскопический осциллограф содержит стробоскопический преобразователь 1, систему 2 автоматического сдвига, усилители 3 и 4 вертикального и горизонтального отклонения соответственно, электронно-лучевую трубку 5, вход 6 исследуемого .сигнала, вход 7 синхронизации. Стробоскопический преобразователь включает смеситель 8, усилитель 9, расширитель 10 импульсбв и генератор 11 стробимпульсов. Система автосдвига состоит из генератора 12 быстрого пилообразного напряжения (БПН), схемы 13 сравнения и генератора 14 медленного пилообразного напряжения (МНП),
В осциллограф введены датчики 15 и 16 положения луча осциллографа, генератор 17 и сумматор 18.
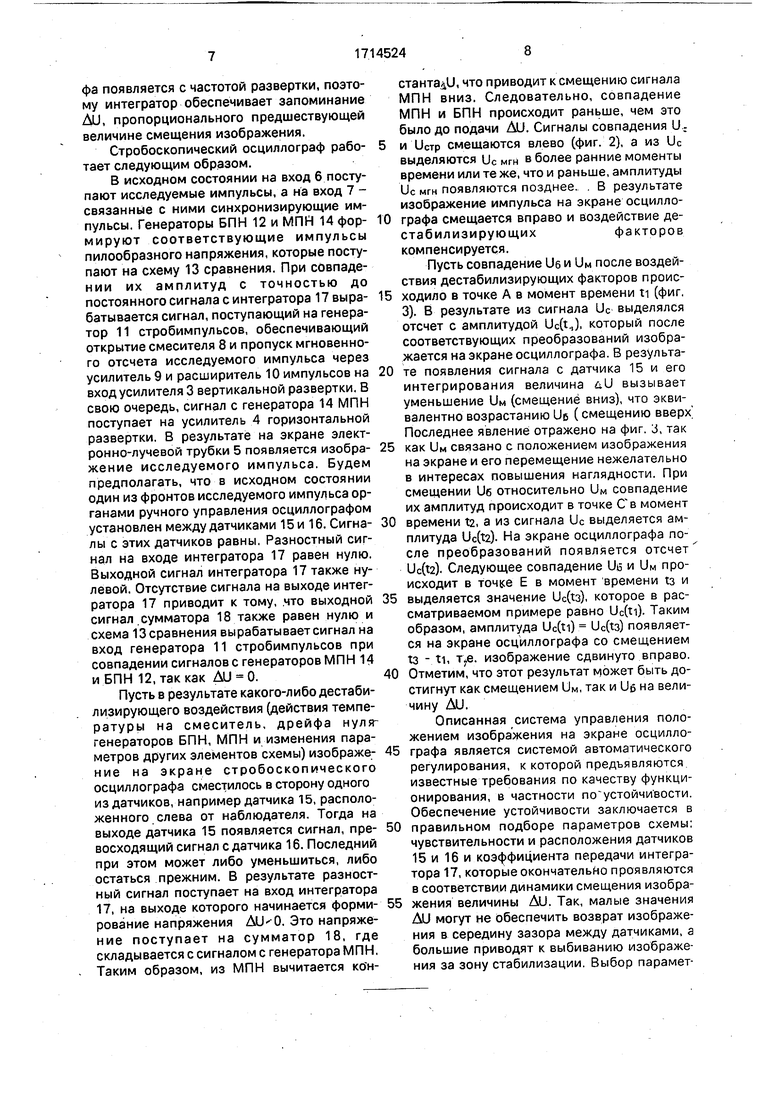
Стробоскопический преобразователь, 1 предназначен для выделения из пачки исследуемых импульсов Uc, поступающих на вход 6, последовательности отсчетов Ucpacm ПО сигналам С системы 2 автосдрига. Смеситель 8 пропускает отсчеты исследуемого сигнала с входа 6 на вход усилителя 9 по сигналу от системы автосдвига (фиг. 2). В простейшем случае смеситель может быть реализован по известной схеме. Усилитель 9 обеспечивает усиление мощности импульсов, поступающих со смесителя. Усилитель 8 - импульсный, он может быть реализован на основе операционных усилителей. Расширитель 10 предназначен для увеличения длительности импульсов, поступающих от усилителя. Расширитель может быть реализован по известной схеме. Генератор 11 стробимпульсов обеспечивает формирование коротких импульсов по сигналу со схемы 13 сравнения. Генератор может быть реализован по известйой схеме.
В современных стробоскопических осциллографах используются более сложные и совершенные схемы преобразователей, в частности имеющие обратную связь от расширителя к смесителю. Однако в рамках изобретения конкретный способ реализации описанных блоков не имеет существенного значения. Последнее относится и к схеме системы 2 автосдвига. Она предназначена для формирования сигналов горизонтальной развертки и сигналов запуска генератора 11 стробимпульсов.
Генератор 12 БПН предназначен для формирования коротких пилообразных импульсов по сигналам с входа 7. Генератор 14 МПН предназначен для выработки медленных пилообразных сигналов, служащих для горизонтальной развертки осциллографа и ступе нчатого (как правило) нарастающего сигнала, подаваемого через сумматор 18 на схему 13 сравнения. Для формированияступенчатого сигнала обычно используют импульсы, поступающие со схемы -13 сравнения. Генераторы йогут быть реализованы по известной схеме. Сумматор 18 предназначен для формирования МПН, сдвинутого относительно сигнала с генератора МПН на величину AU. Сумматор может быть реализован на ocHoeie операционного усилителя. Сумматор 18 может иметь третий вход (не показан) для подачи напряжения от потенциометра ручной регулировки задержки. Схема 13 сравнения
предназначена для выработки импульсов при совпадении амплитуд БПН и сигнала с сумматора 18. Эти импульсы подаются на генератор МПН и генератор стробимпульсов преобразователя 1. Схема 13 сравнения может быть реализована на транзисторах либо операционных усилителях (компараторах).
Усилители вертикальной 3 и горизонтальной 4 развертки предназначены для усиления сигналов с преобразователя 1 и системы 2 автосдвига соответственно до уровня, требуемого для работы горизонтальной и вертикальной отклоняющей системы электронно-лучевой трубки 5.
Датчики 15 и 16 положения луча осциллографа предназначены для формирования сигнала (тока или напряжения), пропорционального яркости свечения участка экрана осциллографа, у которого эти датчики установлены. Датчики располагаются по горизонтальной или наклонной линии и укрепляются любым способом на экране электронно-лучевой трубки. Расстояние между ними выбирается таким образом, чтобы при заданной яркости импульса на экране, ширине линий изображения,, чувствительности датчика и диаграмме его направленности смещение изображения влево вызывало бы появление сигнала на выходе одного из датчиков, а вправо - другого датчика. В процессе ручной настойки осциллографа необходимо добиться, чтобы один из вертикальных фронтов исследуемого импульса находился между датчиками. Если у исследуемого сигнала отсутствуют ярко-выраженные фронты, то в двухлучевых стробоскопических осциллографах можно использовать опорные (задающие) сигналы. В качестве датчиковмогут использоваться любые фоточувствительные элементы (фотодиоды, фототранзисторы).
Интегратор 17 предназначен для накопления разностного сигнала с датчиков 15 и 16 и подачу полученного значения AU в систему автоматического сдвига с целью коррекции отклонений изображения. Интегратор имеет прямой и инверсный входы, к которым подключаются датчики 15 и 16. Если изображение сигнала находится строго между датчиками, то сигналы с них равны, следовательно, их разностный сигнал и выходной сигнал интегратора равны нулю. При смещений изображения сигнал с одного из датчиков возрастает и на выходе интегратора 17 появляется сигнал Ди, пропорциональный величине смещения и имеющий знак, соответствующий направлению смещения. Изображение на экране осциллографа появляется с частотой развертки, поэтому интегратор обеспечивает запоминание ли, пропорционального предшествующей величине смещения изображения.
Стробоскопический осциллограф работает следующим образом.
В исходном состоянии на вход 6 поступают исследуемые импульсы, а на вход 7 связанные с ними синхронизирующие импульсы. Генераторы БПН 12 и МПН 14 формируют соответствующие импульсы пилообразного напряжения, которые поступают на схему 13 сравнения. При совпадении их ампли туд с точностью до постоянного сигнала с интегратора 17 вырабатывается сигнал, поступающий на генератор 11 стробимпульсов, обеспечивающий открытие смесителя 8 и пропуск мгновенного отсчета исследуемого импульса через усилитель 9 и расширитель 10 импульсов на вход усилителя 3 вертикальной развертки. В свою очередь, сигнал с генератора 14 МПН поступает на усилитель 4 горизонтальной развертки. В результате на экране электронно-лучевой трубки 5 появляется изображение исследуемого импульса. Будем предполагать, что в исходном состоянии один из фронтов исследуемого импульса органами ручного управления осциллографом установлен между датчиками 15 и 16. Сигналы с этих датчиков равны. Разностный сигнал на входе интегратора 17 равен нулю. Выходной сигнал интегратора 17 также нулевой. Отсутствие сигнала на выходе интегратора 17 приводит к тому, .что выходной сигнал сумматора 18 также равен нулю и схема 13 сравнения вырабатывает сигнал на вход генератора 11 стробимпульсов при совпадении сигналов с генераторов МПН 14 и БПН 12, так как AU 0.
Пусть в результате какого-либо дестабилизирующего воздействия (действия температуры на смеситель, дрейфа нулягенераторов БПН, МПН и изменения параметров других элементов схемы) изображение на экране стробоскопического осциллографа сместилось в сторону одного из датчиков, например датчика 15, расположенного слева от наблюдателя. Тогда на выходе датчика 15 появляется сигнал, превосходящий сигнал с датчика 16. Последний при этом может либо уменьшиться, либо остаться прежним. В результате разностный сигнал поступает на вход интегратора 17, на выходе которого начинается формирование напряжения . Это напряжение поступает на сумматор 18, где складывается с сигналом с генератора МПН. Таким образом, из МПН вычитается константа и, что приводит к смещению сигнала МПН вниз. Следовательно, совпадение МПН и БПН происходит раньше, чем это было до подачи Ди. Сигналы совпадения Uи UcTp смещаются влево (фиг. 2), а из Uc выделяются Uc мгн в более ранние моменты времени или те же, что и раньше, амплитуды Uc мгн появляются позднее. . В результате изображение импульса на экране осциллографа смещается вправо и воздействие дестабилизирующихфакторовкомпенсируется.
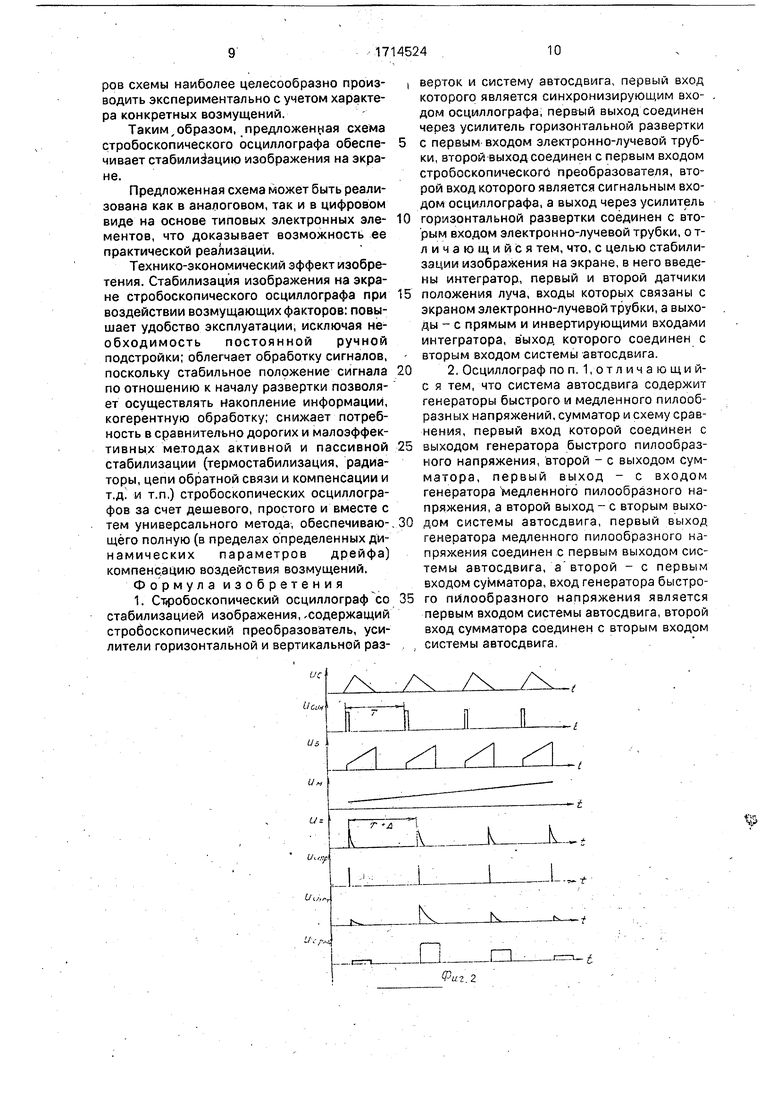
Пусть совпадение Ue и DM после воздействия дестабилизирующих факторов происходило в точке А в момент времени ti (фиг. 3). В результате из сигнала Uc выделялся отсчет с амплитудой Uc(t.,), который после соответствующих преобразований изображается на экране осциллографа. В результате появления сигнала с датчика 15 и его интегрирования величина uU вызывает уменьшение UM (смещение вниз), что эквивалентно возрастанию UB (смещению вверх Последнее явление отражено на фиг. J, так как UM связано с положением изображения на экране и его перемещение нежелательно в интересах повышения наглядности. При смещении Ue относительно UM совпадение их амплитуд происходит в точке момент времени t2, а из сигнала Uc выделяется амплитуда Uc(t2). На экране осциллографа после преобразований появляется отсчет Uc(t2). Следующее совпадение Utj и UM происходит в TO4ii;e Е в момент времени t3 и выделяется значение Uc(t3), которое в рассматриваемом примере равно Uc(ti). Таким образом, амплитуда Uc(ti) Uc(t3) появляется на экране осциллографа со смещением t3 - ti, . изображение сдвинуто вправо. Отметим, что этот результат может быть достигнут как смещением UM, так и Us на величину Аи.
Описанная система управления положением изображения на экране осциллографа является системой автоматического регулирования, к которой предъявляются известные требования по качеству функционирования, в частности поустойчивости. Обеспечение устойчивости заключается в правильном подборе параметров схемы; чувствительности и расположения датчиков 15 и 16 и коэффициента передачи интегратора 17, которые окончательйо проявляются в соответствии динамики смещения изображения величины Аи. Так, малые значения Аи могут не обеспечить возврат изображения в середину зазора между датчиками, а большие приводят к выбиванию изображения за зону стабилизации. Выбор параметров схемы наиболее целесообразно производить экспериментально с учетом характера конкретных возмущений.
Таким,образом, предложенк ая схема стробоскопического осциллографа обеспечивает стабмли: ацию изображения на экране.
Предложенная схема может быть реализована как в аналоговом, так и в цифровом виде на основе типовых электронных элементов, что доказывает возможность ее практической реализации,
Технико-экономический эффект изобретения. Стабилизация изображения на экране стробоскопического осциллографа при воздействии возмущающих факторов: повышает удобство эксплуатации, исключая необходимость постоянной ручной подстройки; облегчает обработку сигналов, поскольку стабильное положение сигнала по отношению к началу развертки позволяет осуществлять накопление информации, когерентную обработку; снижает потребность в сравнительно дорогих и малоэффективных методах активной и пассивной стабилизации (термостабилизация, радиаторы, цепи обратной связи и компенсации и т.д. и т.п.) стробоскопических осциллографов за счет дешевого, простого и вместе с тем универсального метода, обеспечивающёго полную (в пределах определенных динамических параметров дрейфа) компенсацию воздействия возмущений.
Формул а из о бретени я
1. Ст«робоскопический осциллограф со стабилизацией изображения, -содержащий стробоскопический преобразователь, усилители горизонтальной и вертикальной разtm
верток и систему автосдвига, первый вход которого является синхронизирующим входом осциллографа, первый выход соединен через усилитель горизонтальной развертки с первым входом электронно-лучевой трубки, второй выход соединен с первым входом стробоскопическогй преобразователя, второй вход которого является сигнальным входом осциллографа, а выход через усилитель горизонтальной развертки соединен с вторым входом электронно-лучевой трубки, отличающийся тем, что, с целью стабилизации изображения на экране, в него введены интегратор, первый и второй датчики положения луча, входы которых связаны с экраном электронно-лучевой трубки, а выходы - с прямым и инвертирующими входами интегратора, выход которого соединен с вторым входом системь автосдвига.
2. Осциллограф по п. 1, о т л и ч а ю щ и й0 я тем, что система автосдвига содержит генераторы быстрого и медленного пилообразных напряжений, сумматор и схему сравнения, первый вход которой соединен с выходом генератора быстрого пилообразного напряжения, второй - с выходом сумматора, первый выход - с входом генератора медленного пилообразного напряжения, а второй выход-с вторым выходом системы автосдвига, первый выход генератора медленного пилообразного напряжения соединена первым выходом системы автосдвига, а второй - с первым входом сумматора, вход генератора быстрого пилообразного напряжения является первым входом системы автосдвига, второй вход сумматора соединен с вторым входом системы автосдвига,
л л ,

| название | год | авторы | номер документа |
|---|---|---|---|
| Стробоскопический осциллограф | 1972 |
|
SU445916A1 |
| Осциллографический способ измерения временных параметров сигналов | 1985 |
|
SU1372234A1 |
| СТРОБОСКОПИЧЕСКИЙ ОСЦИЛЛОГРАФ | 1972 |
|
SU426195A1 |
| Способ развертки СВЧ-сигналов в широкополосных строб осциллографах | 1989 |
|
SU1734026A1 |
| Стробоскопический осциллограф | 1972 |
|
SU477353A1 |
| Импульсный рефлектометр | 1979 |
|
SU808979A1 |
| Устройство развертки для стробоскопического осциллографа | 1981 |
|
SU1029090A1 |
| Измеритель временной задержки со стробоскопической индикацией сигнала | 1982 |
|
SU1078341A1 |
| Устройство для автоматического временного сдвига стробирующих импульсов | 1979 |
|
SU864143A1 |
| Осциллограф | 1990 |
|
SU1739304A1 |
Изобретение относится к измерительной технике. Цель - стабилизация изобра-• Г ': ~жения на экране. Для этого предлагается установить на экране электронно-лучевой трубки фоточувствительные датчики положения фронта импульса и использовать сигналы с них для стабилизации изображения путем введения соответствующей обратной связи в систему автосдвига. При этом повышаются удобство эксплуатации и точность измерения, снижаются затраты на стабилизацию режимов работы элементов. Устройство coдepikит электронно-лучевую трубку 5 с усилителями горизонтального и вертикального отклонений, систему автосдвига 2, стробпреобразов^тель 1, датчики 15 и 16 положения луча и интегратор 17.1 з.п. ф-лы, 3 ил.\f\^сл|!^__ _ _: -е,! Сриг.1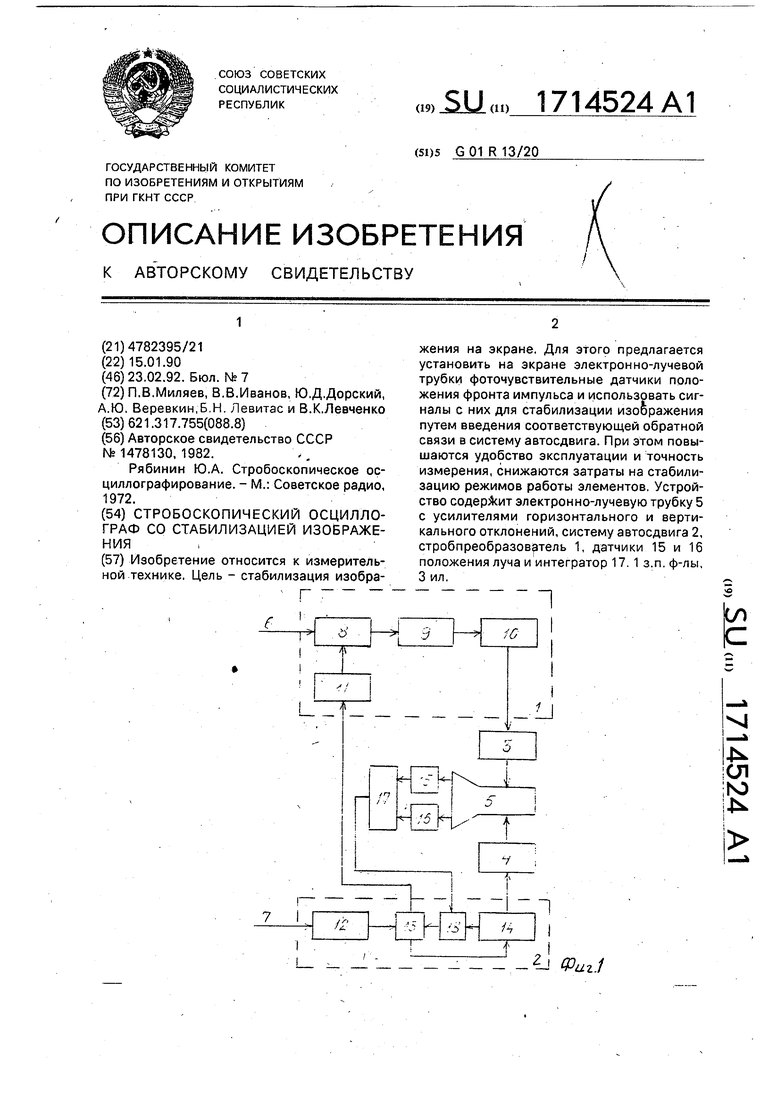
К
А.
.сп
С
-аг. 2
Lie l(
vUi L/Л/
иг.5
| Устройство подавления нестабильностей стробоскопического регистратора | 1987 |
|
SU1478130A1 |
| Стробоскопическое ос- циллографирование | |||
| - М.: Советское радио, 1972. | |||
