/ГГн
,д-г
5 /;.т:а



| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующая опора | 1989 |
|
SU1746094A1 |
| Виброизолирующая опора | 1990 |
|
SU1774100A1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Виброизолятор с автоматическим управлением | 1986 |
|
SU1370343A1 |
| Виброизолирующая опора | 1987 |
|
SU1532726A1 |
| Система автоматического гашения вибраций | 1984 |
|
SU1269106A1 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| Виброгасящее устройство с автоматическим управлением | 1986 |
|
SU1406407A1 |
| Виброизолирующая опора | 1985 |
|
SU1283458A1 |
| Регулятор для виброзащитного устройства | 1987 |
|
SU1509841A1 |

Изобретение относится к машиностроению, а именно к средствам активного гашения вибраций различных объектов, и может быть использовано для защиты виброчувствительного к изоляции виЬроактивного оборудования. Целью изобретения является повышение эффективности виброизоляции за счет увеличения устойчивости системы управления путем снижения коэффициента передачи силы в диапазоне потенциальной неустойчивости. Соотношения, представленные в формуле изобретения, позволяют в зависимости от собственной частоты упруго закрепленного вибровозбудителя вы
./
брать оптимальное соотношение Кв1/Кв2, обеспечивающее максимальное динамическое гашение на частоте настройки вибровозбудителя. При включении блока управления устройства напряжение с вибродатчика 12 после усиления и коррекции в блоке 11 подается на вибровозбудитель 6, который развивает близкие по величине и антифазные вибрационным силам компенИзобретение относится к машиностроению, а именно к средствам активного гашения вибрации различных объектов, и может быть использовано для защиты виб- рочувствительного и изоляции виброактив- 5 ного оборудования.
Известно виброизолирующее устройство с автоматическим управлением, содержащее промежуточную массу, связанную через силоизмерительный датчик и первый 10 упругий элемент с виброактивным объектом, а через второй упругий элемент с защищаемым объектом, электродинамический вибровозбудитель, корпус которого установлен на основании, а рабочий орган 15 скреплен с промежуточной массой, блок управления, подключенный входом к силоиз- мерительному датчику, а выходом - к электродинамическому вибровозбудителю.
Недостатком известного устройства яв- 20 ляется его низкая эффективность при гашении широкополосной и меняющейся по частоте и амплитуде вибрации.
Объясняется это тем, что в известном виброизолирующем устройстве с автомати- 25 ческим управлением силоизмерительный датчик расположен между промежуточной массой и внешним от виброактивного объекта концом упругого элемента, поэтому он измеряет вязкоупругие силы его деформа- 30 ции, которые в диапазоне вибрации (обычно в зарезонансной области двухкаскадной виброизолирующей системы) существенно отличаются от вибрационных сил, действующих на защищаемый объект (т. е. тех сил, 35 которые должны быть скомпенсированы при правильной работе устройства).
Электромеханическая система управления известного виброизолирующего устройства является принципиально 40 узкополосной и не может обеспечить гашение вибрации в широкой полосе частот или вибрации с меняющимися по амплитуде и частоте вибрационными составляющими.
К недостаткам этого устройства следует также отнести снижение его виброизолирусирующие усилия, действующие на опор-- ный фланец 8, присоединяемый к объекту 2. Поскольку блок 11 управления содержит
широкополосный 15 и полосовые 16i, 162
16N усилители, то этим обеспечиваются условия устойчивости при суммарном усилении канала управления, близком К-1.1 з. п. ф-лы, 3 ил.
ющих свойств на резонансных частотах промежуточной массы из-за многократного увеличения амплитуды ее колебаний.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является виброизолирующее устройство с автоматическим управлением, содержащее два последовательно устанавливаемых между виброактивным и защищаемым объектами виброизолятора, в узле скрепления которых размещена промежуточная масса с прикрепленным к ней вибровозбудителем, рабочий орган которого присоединен к опорному фланцу виброизолирующего устройства, предназначенному для прикрепления к защищаемому объекту, блок управления, подключенный входом через согласующий усилитель к вибродатчику, а выходом - через усилитель мощности к вибровозбудителю.
Недостатком этого виброизолирующего устройства с автоматическим управлением является его низкая эффективность, обусловленная склонностью его системы управления к самовозбуждению и близостью собственных частот системы к спектру вибрации.
Цель изобретения - повышение эффективности виброизоляции за счет увеличения устойчивости системы управления путем снижения коэффициента передачи силы в диапазоне потенциальной неустойчивости (в диапазоне, содержащем критические частоты системы управления).
Эта цель достигается тем, что виброизолирующее устройство с автоматическим управлением снабжено упругой подвеской, установленной между узлом скрепленных виброизоляторов и вибровозбудителем. При этом жесткости Кв1, Кв2 виброизоляторов выбраны из соотношений v,- ( ±. ( Квв/Кву ) + ( глвв g/Сву ) „ ч ( Квв/Кву ) - ( твв g/GBy ) Кву К „-. KelKay
где Кву- заданная жесткость виброизолирующего устройства;
Квв - жесткость упругой подвески вибровозбудителя;
глав - масса вибровозбудителя;
Сву - заданная весовая нагрузка устройства;
g - ускорение силы тяжести.
Цель изобретения обеспечивается так- же тем, что блок управления выполнен в виде параллельно включенных широкополосного и одного полосового усилителя, а коэффициент усиления широкополосного усилителя на частотах вибрации больше коэффициентов усиления полосовых усилителей.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 -частотные характеристики коэффициента передачи си- лы виброизолирующей системы, выполненной на основе предлагаемого виброизолирующего устройства; на фиг. 3 - вариант конструктивной компоновки элементов устройства при использовании элек- тромагнитного вибровозбудителя в дифференциальном исполнении.
Виброизолирующее устройство с автоматическим управлением (фиг. 1) содержит два последовательно устанавливаемых между виброактивным 1 и защищаемым 2 объектами виброизолятора 3 и 4 с узлом 5 скрепления, вибровозбудитель 6, рабочий орган 7 которого соединен с опорным фланцем устройства, предназначенным для при- соединения к защищаемому объекту 2, а корпус 9 посредством упругой подвески 10 соединен с узлом 5 скрепления виброизоляторов 3, 4, блок 11 управления, подключенный входом к вибродатчику 12, а выходом - к вибровозбудителю 6.
В качестве вибродатчика 1.2 в устройстве (фиг. 1) применен пьезоэлектрический динамометр, установленный между внешним от узла 5 скрепления концом виброизо- лятора 4 и опорным фланцем 8 устройства, предназначенным для присоединения к защищаемому объекту 2.
Другой опорный фланец 13 устройства предназначен для его присоединения к виброактивному объекту 1. Блок 11 управления содержит соединенные входами и подключенные выходами к входам а налогового сумматора 14 широкополосный 15 и полосовые
16г, 16216N усилители .(N - количество
подлежащих гашению вибрационных составляющих).
Виброизолирующее устройство с авто матическим управлением (фиг. 1) работает следующим образом.
При включенном канале упраь.-внм (последовательно включенные силоилмери тельный датчик 12, блок 11 управления с подключенным к его выходу вибровозбудителем 6) и выборе коэффициентов жесткости КВ1 и КВ2 виброизоляторов 3 и 4 в соответствии с предлагаемыми соотношениями, упруго прикрепленный к узлу 5 вибровозбудитель 6 как динамический гаситель обеспечивает максимальное гашение передаваемых виброизоляторами 3 и 4 сил в некотором диапазоне частот, содержащемся частоту его настройки. На фиг. 2 представлена частотная зависимость эффективности устройства (кривая 1), определяемая как отношение (в дБ) силы fo, действующей на виброактивный объект 1 (вынуждающая сила), к силе f, передаваемой виброизоляторами 3, 4 на защищаемый объект 2 (через силоизмерительный датчик 12). Частота настройки упруго закрепленного вибровозбу- дителя как динамического гасителя ш Ъъ (Квв/гпвв) выбрана равной 5оь 5(КВу . g/Goy) , где Сву- заданная весовая нагрузка; (OQ- собственная.частота виброактивного объекта 1, установленного на виброизолирующем устройстве, Из сравнения с аналогичной зависимостью (кривая 2) для виброизолирующей системы, выполненной на основе устройства-прототипа, видно, что в диапазоне частот 4,-65 (лУиъ 1,6 предлагаемое виброизолирующее устройство как пассивное средство виброизоляции обладает более высокой эффективностью, причем увеличение эффективности на частотах (t/a)Q - 5 и 10 составляет 22 и 10 дБ.
Соотношения (1) отражают выявленную расчетную зависимость эффективности упруго встроенного в опору вибровозбудителя как динамического гасителя от отношения жесткостей KB i, KB2 .виброизоляторов 3, 4. Эти соотношения, полученные в результате оптимизации параметров устройства, позволяют в зависимости от собственной частотыупругозакрепленноговибровозбудителя выбрать оптимальное соотношение Кв1/КВ2, обеспечивающее максимальное динамическое гашение на частоте настройки вибровозбудителя.
Исследования устойчивости системы управления виброизолирующего устройства показывают, что условия (1) обеспечивают повышенную устойчивость системы, что позволяет использовать более эффективные режимы компенсации сил, действующих на защищаемый объект 2.
При включении канала управления устройства выходное напряжение вибродатчика 12 после усиления и коррекции в блоке 11 управления подается в вибровозбудитель 4. При этом параметры блока 11 управления выбраны так, что коэффициент усиления канала управления устройства на частотах вибрации, например U/OJQ 10, близок к значению-1 , а поэтому вибровозбудитель 6 развивает близкие по величине и антифазные вибрационным силам f компенсирующие усилия f°, действующие на опорный фланец 8 устройства, присоединяемый к защищаемому объекту 2. Благодаря этому на выходе устройства - опорном фланце 8 - осуществляется автоматическая компенсация вибрационных сил f, передаваемых на него через виброизоляторы 3 и 4.
Поскольку блок 11 управления содержит широкополосный 15 и полосовые 16i, J62, .... 1 бы усилители (N - количество вибрационных составляющих, к гашению кото- рых предъявляются повышенные требования), то практически всегда удается обеспечить условия устойчивости при суммарном усилении канала управления, близком к -1. Это объясняется тем, что включение избирательных цепей, настроенных на частоты вибрации, не приводит к возникновению автоколебаний в системе автоматической виброкомпенсаций. Благодаря этому с помощью изобретения удается обеспечить значительный эффект в широкой полосе частот и еще более высокий на заданных частотах вибрации. При этом свойственная избирательным активным виброизолирующим системам резкая зависимость эффективности от точности настройки полосовых усилителей на частоты вибрации проявляется значительно слабее.
В тех случаях, когда условия устойчивости системы управления виброизолирующего устройства позволяют (зависит от характеристик системы виброизоляции, в которой используется устройство) выбрать коэффициент Кш усиления широкополосного тракта канала управления близким к -1, полосовые усилители 16т, 162, 1бз, ... 16м в структурной схеме блока управления отсутствуют.
На фиг. 2 показана зависимость (кривая 3) эффективности виброизолирующего устройства с автоматическим управлением при реализации коэффициента усиления Кш -0,9.
Из сравнения кривой 3 с аналогичной кривой 4 (для того же Кш -0,9) для устройства-прототипа видно, что в окрестности первой частоты вибрации ВД&о 5 эффективность изобретения выше, устройства- прототипа почти на 35 дБ, а на частоте
0
иУ(1& 10 их эффективности практически равны. Поскольку наиболее низкочастотная составляющая вибрации имеет максимальное значение, то отмеченный положительный эффект предлагаемого устройства является чрезвычайно важным.
Кривые 5 и б (фип 2) отражают особенность работы виброизолирующего устройства в режиме, реализующемся при
0 использовании заявляемой структурной схемы блока 11 управления (фиг. 1). Она соответствует значениям коэффициентов усиления щирокополосного Кш и избирательного Kn(ftJ&Jo) трактов на частоте вибрации 10, равным соответственно-0,08; -0,19 (кривая 5) и-0,5;-0,49 (кривая 6). Видно, что при одинаковом суммарном усилении канала управления на частоте вибрации оУшо 10, равном Кг Кш + Кн(10) -0,99, частотная зависимость эффективности при заявляемом отношении Кш/Ки(Ю) 0.8/0.19 1 является более предпочтительной в диапазоне частот 5,1 O/( Кроме того, ре5 ализация неравенстваКш Ки(10)
обеспечивает более широкую полосу частот на заданном уровне эффективности в окрестности частоты настройки to пу 10 ftJo полосового усилителя. Так, при уровне
Q эффективности Во 30 ДБ по сравнению с применением обычных виброизоляторв (кривая 7) полоса эффективности для случая Кш -0,8, Ки(10) -0,19 (кривая 5) превышает аналогичную полосу для случая Кш
5 -0,5; Ки(10) -0,49 (близким к граничному значению Кш/Ки(10} 1 заявляемого соотношения) более чем в 2 раза. Это свойство предлагаемого устройства при реализации в нем заявляемого соотношения оказываетл ся особенно важным при нестабильной по частоте вибрации или вибрации, содержащей несколько близких по частоте составляющих (сгруппированная вибрация).
В виброизолирующем устройстве с авс тематическим управлением (фиг. 1) вибровозбудитель 6 может быть электродинамическим или электромагнитным в однотактом и дифференциальном ис- полнениях. При использовании
Q электродинамического вибровозбудителя между его рабочим органом 7 и опорным фланцем 8 может устанавливаться сопрягающее соединение 17, обеспечивающее надежную работу устройства в условиях
е значительных деформаций виброизоляторов 3,4 и неискаженную передачу развиваемых вибровозбудителем сил.
В качестве сопрягающего соединения могут быть использованы стержень, метал- ластиковый элемент или пара прижатых
друг к другу контактных элементов, выполненных с возможностью из взаимного перемещения в поперечной плоскости устройства.
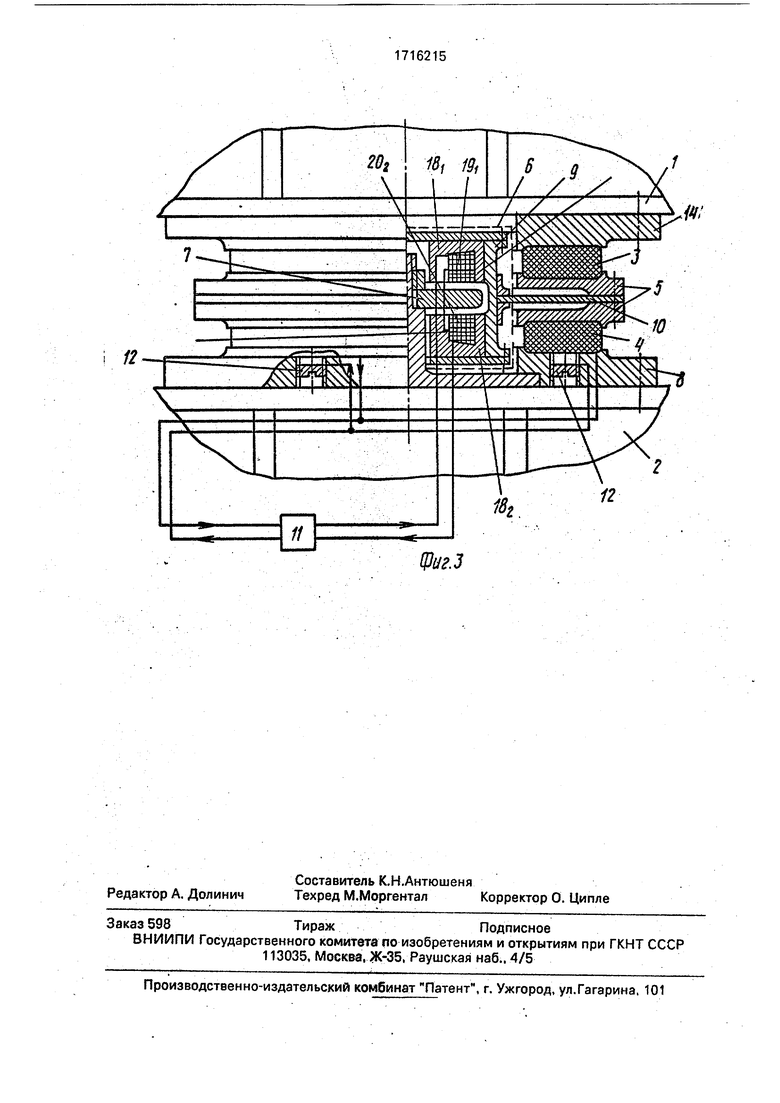
Вариант возможной конструктивной компоновки элементов устройства (фиг. 1) при использовании электромагнитного вибровозбудителя в дифференцированном исполнении представлен на фиг. 3.
Якорная часть (рабочий орган 7) вибро возбудителя 6 скреплена с опорным фланцем 8 устройства, а корпус 9 (вместе с установленными в нем магнитными сердечниками 18i, 182, рабочими 101,192.И подмаг- ничивзющими 20i, 202 обмотками) посредством кольцевой мембраны 10 присоединен к узлу 5 скрепления виброизоляторов 3 и 4. Жесткость мембраны 10 по рабочей оси устройства многократно меньше ее жесткости в перпендикулярных к этой оси направлениях, что превращает упруго закрепленный вибровозбудитель 6 в компонентный динамический гаситель.
Виброизоляторы 3, 4 устройства выполнены в виде кольцевых резиновых элемен- тов, параметры которых выбраны так, что их жесткость по продольной оси устройства в несколько раз превышает жесткость в перпендикулярных к этой оси направлениях. При этом эти виброизоляторы передают на опорный фланец 8 устройства преимущественно силы по его продольной оси. Компоненты вибрационных сил других направлений воспринимаются другими аналогичными устройствами, установленным под некоторым углом (например, 90°) к устройству, . представленному на фиг. 3. Это позволяет осуществить виброзащиту объекта 2 при пространственных колебаниях объекта 1, используя для этой цели однокомпонентный вибровозбудитель {он же - динамический гаситель).
В тех случаях, когда продольная и поперечная жесткости виброизоляторов 3, 4 по условиям эксплуатации должны быть соиз- меримы, жесткости упругой подвески 10 по ее упругим осям выбираются из условия эф- фективногодинамического гашения потрем направлениям. Однако, учитывая избирательные свойства динамического гашения, этот режим работы предлагаемого устройства целесообразно применять при наличии спектра вибрации превалирующей вибрационной составляющей. При этом снижение соответствующей ей пространственной си- лы, действующей на защищаемый объект 2, осуществляется с помощью виброизоля- торв 3,4 и встроенного динамического гасителя-вибровозбудителя, а по продольной оси устройства дополнительно - с.помощью
системы автоматической виброкомпенсации. Остальные поперечные составляющие вибрационного спектра снижаются только за счет виброзащитных свойств виброизоляторов 3 и 4.
При наличии в системе виброизоляции вынуждающих воздействий в диапазоне собственной частоты W&o 1 (дополнительно к вибрационным воздействия в ее заре- зонансной области) жесткость КВо в соответствии с соотношениями (1) должна быть близкой к Кв2, что на практике соответствует упругому закреплению вибровозбудителя к опорному фланцу 13, присоединяемому к виброактивному объекту,
Частота настройки вибровозбудителя при этом должна выбираться из условия ее равенства собственной частоте системы виброизоляции й)ьь сооЧастотная зависимость эффективности виброизолирующей системы, реализованной с использованием таких устройств при Kf Кш -0,9, представлена кривой 8 на фиг. 2. Видно, что предлагаемое виброизолирующее устройство с автоматическим управлением обеспечивает вирозащиту не только в диапазоне вибрации а)а)о но и окрестности собственной частоты шо исходной (без системы виброкомпенсации) виброизолирующей системы. Виброзащитный эффект на частоте UJQ при этом по сравнению с устройством-прототипом составляет 40 дБ. Важным достоинством предлагаемого устройства является сохранение высокой эффективности взаре- зонансной области частот, где уровень вибровозбуждения защищаемого объекта достаточно велик.
Таким образом, упругая подвеска вибровозбудителя в узле скрепления виброизоляторов и выбор оптимальных параметров позволяет значительно увеличить эффективность виброизолирующего устройства с автоматическим управлением как в зарезонансной области частот системы, так и в окрестности ее собственных частот.
Формула изобретен и я
овышения эффективности виброизоляции, оно снабжено упругой подвеской, установленной между узлом скрепления виброизоляторов и вибровозбудителем, a KBI и Кв2 жесткости виброизоляторов выбраны из соотношений
v - f . , ( Квв/Кву ) + (тввд/Сву ) ,, ч . + (Квв/Кву)-(твв9/вву) Кву)
КВ2
КвгКву
КВ1-КВу где КВу - заданная жесткость устройства;
Квв - жесткость упругой подвески виб- ровозбудителя;
1 г ъ v 5 б
гпвв - масса вибровозбудителя-; Сну - заданная весовая нагрузка на устройство;
g - ускорение силы тяжести
Ж Ц 7Г W &
12
Щиг.З
| Виброизолирующее устройство с автоматическим управлением | 1984 |
|
SU1193328A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Виброизолирующее устройство с автоматическим управлением | 1987 |
|
SU1462050A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
